






文献来源:Received October 19, 2020, accepted November 5, 2020, date of publication November 19, 2020,date of current version December 10, 2020.
Digital Object Identifier 10.1109/ACCESS.2020.3039271
摘要
无线覆盖的广泛普及使得基于位置的高级服务(LBS)的数量达到了顶峰。对精确物理位置的连续跟踪是这些服务的基础,这是一项具有挑战性的任务,尤其是在室内。对于室内定位系统(IPS),已经提出了多种技术和算法。然而,准确性、可靠性、可伸缩性和对环境的适应性仍然是广泛部署的挑战。特别是,在变化很大的室内环境中不可预测的无线电传播特性加上接入技术的限制导致了这些挑战。最近,机器学习(ML)方法被广泛尝试来克服这些挑战,并取得了相当大的成功。在本文中,我们的目标是提供使用最常见的无线技术的ML使能本地化技术的全面调查。首先,我们简要介绍了室内定位技术的背景。然后,我们讨论了各种最大似然技术(有监督和无监督),它们可以缓解室内定位中的不同挑战,包括非视距(NLOS)问题、设备异构性和具有合理复杂性的环境变化。使用大量已发表的结果讨论了众多问题之间的权衡。我们还讨论了如何有效地使用ML算法来融合不同的技术和算法,以实现全面的IPS。本质上,这项调查将作为参考材料,以获得关于机器学习的最新发展的详细知识,以实现准确的室内定位。
索引术语:室内定位系统(IPS)、基于位置的服务(LBS)、机器学习(ML)、非视距(NLOS)、无线定位、室内跟踪。
I. INTRODUCTION
准确的真实的时间定位是实现基于位置服务(LBS)的关键。虽然全球定位系统(GPS)被广泛用于室外定位,但在受限的室内环境中,GPS可用性并不令人满意。与室外不同,室内环境非常复杂,具有不同的形状,大小以及存在/不存在静止和移动物体(例如家具和人)。这些因素显著地改变视线(LOS)和非视线(NLOS)无线电信号传播两者,从而引起不可预测的衰减、散射、阴影和盲点,这些显著地降低了室内定位的准确性。
然而,由于对LBS的高需求,最近室内定位系统(IPS)的发展受到了极大的关注。基于接收信号强度指示符(RSSI)[1]、到达时间(ToA)[2]、到达时间差(TDoA)[3]、到达角(AoA)[4]和信道状态信息(CSI)[5]的典型测距技术已经使用各种接入技术提出,诸如Wi-Fi [6]、蓝牙[7]、超宽带(UWB)[8],以及用于室内定位的射频识别标签(RFID)[9]。大多数测距技术需要至少三个已知的锚节点来计算未知目标的位置。文献中还研究了一些与距离无关的技术,如Centroid [10]方法和DV hop[11]技术。
所有这些方法都面临着诸多挑战,包括精度低、计算复杂度高和不可靠,而大多数定位设备缺乏强大的处理能力。此外,在确保安全和隐私的同时维护大型数据库(用于大规模IPS)的能力,以及以合理的成本支持设备异构性是室内本地化的其他一些挑战[12]。
近年来,人工智能(AI)和机器学习(ML)算法在室内定位方面取得了很好的成功[13]-[16]。AI/ML方法的主要优势是它们能够有效地利用观测数据做出决策,而不需要精确的数学公式。
例如,[17]-[20]中的作者已经将监督和无监督ML技术应用于NLOS识别和缓解,而深度学习(DL)技术则应用于[14]中的NLOS缓解。在[13]中,DL递归神经网络(RNN)已被用于通过探索其时域相关性来科普RSSI信号波动。此外,DL技术已被用于提取RSSI测量的隐藏特征,以最小化[21]中指纹数据的收集,并在[22]中探索机器人导航期间的未知环境。此外,在[23]和[24]中,基于监督和无监督学习的降维技术已被用于降低指纹数据的复杂性和存储空间。
ML也被证明是融合从多个定位传感器、技术和方法收集的多维数据的有效方法。例如,在[25]-[27]中,监督学习和无监督学习都被应用于融合权重生成。然而,无监督ML融合技术是上级的,因为它在没有离线训练的情况下实时计算权重[28]。此外,迁移学习已应用于基于指纹的定位,以增强系统的可扩展性,而无需过多的现场调查,并且在缺乏标记数据时不会牺牲准确性[29]。
虽然文献中包含了大量关于ML在室内定位中的应用的文章,但据我们所知,还没有对这一主题进行全面的调查。因此,在本文中,我们讨论了现有的室内定位技术,并建立了一个先例,需要ML技术在上述领域。此外,我们的论文遵循直观的流程,指出室内定位的挑战和问题,列出现有的解决方案,然后确定导致我们在室内环境中使用基于ML和DL的解决方案的差距。
本文的其余部分组织如下:在第二节中介绍了关于室内定位的螺母和螺栓的基本讨论。第三节简要介绍了ML技术,第四节深入分析了现有的基于ML的IPS解决方案。在第五节中强调了一些潜在的应用,最后在第六节中,我们讨论了ML方法的局限性和未来的挑战。
思考
在已知ML能为室内定位提供一定的解决方案的前提下,是否能确认使用ML和DL方案的区别与各自的优缺点。ML在室内定位这一方面是否比其他IPS解决方案更具有可靠性和稳定性?
II. REVIEW OF INDOOR LOCALIZATION BASICS
室内定位系统(IPS)是一种无GPS系统,它以连续的方式估计封闭环境(例如建筑物,隧道)中物体或人的位置。通常,它有两个阶段:1)距离测量阶段和 2)位置估计阶段[30]。在距离测量阶段中,IPS使用合适的测距技术估计目标节点与位置先验已知的锚节点之间的距离。然后,IPS使用这些距离观测值通过使用不同的定位/定位方法来估计目标的位置。
A. RANGING AND ENHANCED RANGING TECHNIQUES
最常用的本地化技术如下:
1.接收信号强度指示器(RSSI)
RSSI通常是最容易测量的参数,但由于衰落、阴影、折射、散射和反射,它会产生最不准确的距离测量,特别是在室内。因此,使用不同的滤波器,如扩展卡尔曼滤波器(EKF)[31]和其他ML技术已用于减轻RSSI波动。
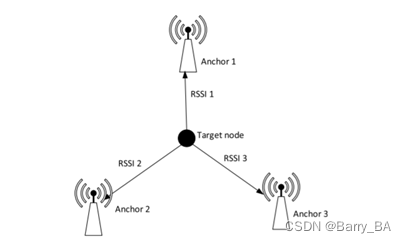
图1.使用RSSI测量进行定位的示意图。
优点:
容易测量,成本低,容易实现。
缺点:
由于信号传播的过程中,受到距离和障碍物的影响。信号的功率强度随之衰减,间接影响精度,随之产生不准确的距离测量。
2.到达时间(ToA)
ToA技术使用信号传播时间来计算距离(目标和锚节点之间的距离)。ToA通常比RSSI方法准确得多。然而,处理时间和同步时间会影响ToA中的距离测量[32]。有几种技术,如对称双边双向ToA测距[33]被提出来消除时间同步误差。该方法通过考虑节点之间的许多来回循环信号传播来平均误差。
优点:
克服了磁定向法固有的测量精度不够的弱点,定位精度较高。
缺点:
由于回击波形峰值点随传播路径和距离的不同要发生漂移和畸变,或由于环境的干扰而导致时间测量误差(张其林等,2008),使得时差法的实际探测误差为几百米到几千米。需要设的测站较多,且对测时精度要求较高。
3.到达时间差(TDoA)
这种方法利用目标节点和锚节点数量之间的信号传播时间差来确定目标节点的位置[34]。在该技术中,至少需要三个锚节点来计算目标在双曲面的交点处的位置。TDoA可以在一定程度上解决同步误差的问题,因为它只考虑了发射机的同步[35]。然而,信号的NLOS传播显著降低了基于ToA/TDoA的系统的性能。因此,在文献中提出了许多NLOS识别和缓解方法,以提高基于ToA/TDoA的定位的准确性[36]。
NLOS: non-line-of-sight
无线信号的非视线传输
优点:
不存在相位模糊的问题,系统复杂度低,定位精度较高。
缺点:
需要多个监测点来获取信号,成本相对较高。
4.到达角(AoA)
AoA技术使用信号与天线阵列形成的角度进行位置估计[37]。这是一种增强的测距技术。由于使用角度和距离测量,理想情况下,两个锚节点足以进行位置估计[38]。然而,这种方法的一个缺点是需要天线阵列,这使得它复杂且昂贵[39]。该方法还可以采用信号到达各个天线元件的时间差,但是为此需要更复杂的硬件和精确的校准。
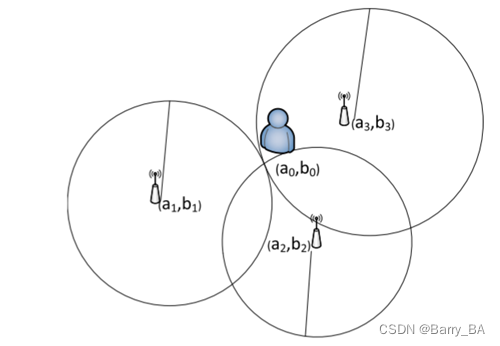
图2.基于三边测量的定位示意图。
优点:
可利用单基站,进行覆盖区域内的位置定位识别。抗干扰能力强,高精度定位。
缺点:
覆盖范围有限,需要多基站或天线阵列,因此对于覆盖范围有一定限制,无法实现全室内覆盖8
5.信道状态信息(CSI)
这也是一种增强的测距技术。CSI可用于获得整个信号带宽上的接收信号的准确估计。这比RSSI好得多,在RSSI中,仅获得接收信号的单个幅度值。CSI通常需要多个天线,并且必须估计由每个天线看到的信道频率响应。CSI可以提供信道响应的幅度和相位,并且它适用于基于距离和无距离的定位方案[5]。表2总结了不同距离测量技术的优点和缺点。
优点:
1.对于每一个接收数据包,CSI可以得到30个信道频率响应,即CSI是一种细粒度的信号。2.CSI对于环境敏感,作为指纹来分辨位置更加有效。3.对于固定位置,CSI分组接收数据包比RSS更加稳定。
缺点:
有一定开销。
B.LOCALIZATION METHODS
室内定位常用的定位方法如下:
1) MULTILATERATION AND TRILATERATION
它是一种在三个或更多已知节点和相应的相关距离的帮助下估计未知节点位置的技术[40]。三边测量是仅使用三个已知节点的测量的特殊情况。在二维空间中,目标节点的位置是通过三个假想圆的交点计算的,如图2所示。然而,在实际的室内环境中,这些圆并不满足在一个单一的点,由于NLOS效应,造成巨大的定位误差。因此,在三边测量算法中存在两个主要问题:
1)由于测距技术的不精确性,目标节点不在圆的公共交点处。
2)给定的已知锚节点可以共线。
已经提出了不同的技术和算法来解决这些问题。在[41]中,已经使用指纹识别和三边测量的混合技术来克服第一个问题。在[42]中,作者提出了一种最小二乘法来解决上述两个问题。本着同样的精神,作者在[43]中提出了一种加权最小二乘法来解决三边测量的非理想情况。
2) TRIANGULATION
当到达角可用时,它可以用于定位精度。它不太复杂,具有中等精度[44],需要至少两个锚节点。该技术的定位精度很大程度上取决于AoA估计的精度。增加锚节点的数量可以提高定位性能。
3) FINGERPRINTING
它是一种广泛使用的室内定位方法,使用各种无线接入技术,如Wi-Fi,BLE和ZigBee [45]-[47]。基于指纹的定位方法包括两个阶段:
1) 离线阶段训练。
2) 在线阶段测试。
在训练阶段期间,在接入点(AP)处针对称为参考点(RP)的不同已知室内位置收集RSSI或CSI数据,并且利用针对每个记录的位置的测量数据构建无线电地图。在在线阶段期间,通过比较目标节点的AP处的测量数据和在训练阶段中创建的无线电地图来估计目标节点的实时位置。
如果准确地收集更多的离线数据来构建无线电地图,则该方法提供高精度。然而,构建用于大区域部署的无线电地图需要巨大的努力(例如,人力、时间和成本)。此外,对于动态网络,当节点的位置,即使是单个节点,被意外地改变或删除时,离线数据库应该被重新创建。
ML算法通常用于提高指纹识别的准确性,并帮助重新创建无线电地图。K-Nearest Neighbors(K-NN)是用于基于指纹的定位方法的最简单算法。这里K表示最近邻的个数。在该算法中,计算距离度量,该距离度量计算训练阶段中的测量与不同AP处的目标的测量之间的距离。最常用的距离度量是欧几里得距离。在该算法中,从无线电地图中选择具有最小距离的目标的K个最近RP。然后,这些RP的坐标被平均以估计目标的位置。然而,其他距离度量,如曼哈顿距离、Mahalanobis距离和Minkowski距离也可用于K-NN算法[48]。
[48]、[49]中的作者在基于指纹的定位中比较了Mahalanobis、曼哈顿和欧几里得距离,发现曼哈顿(也称为城市街区距离)比其他距离提供了更准确的结果。在文献中已经发现了对K-NN算法的不同改进。例如,[50]和[51]中的作者分别使用了增强的加权K-NN算法和基于聚类的K-NN算法,以获得更高的精度。
4) CENTROID
在该方法中,使用几何关系来估计未知节点的位置,而不是使用距离或角度测量。当在每个锚节点和未知目标节点之间建立稳定的通信链路时,确定锚节点的位置。由于连接到目标节点的锚节点的位置形成确定的几何形状,因此该几何形状的质心被认为是未知节点的位置。不同的算法已被采用在文献中,利用质心方法。在[52]中已经提出了使用加权质心定位(WCL)方法的基于BLE信标RSSI的室内定位系统。
5) DV HOP
该方法涉及基于跳数估计多跳环境中的距离向量。第i个节点的坐标和从锚节点到第i个节点的最小跳计数值被保持在信息表中。锚节点将位置信息广播给邻居节点,邻居节点再将位置信息广播给其他节点,以此类推。在得到平均跳数h之后,距离锚节点m跳的节点的距离被简单地计算为m × h。基于所测量的距离,目标节点使用位置估计算法来定位自身。
Voronoi图通常用于缩放DV跳算法,以便限制DV跳定位系统中的洪泛范围[52]。通过提升合适的本地化节点来创建额外的锚节点[11]。
不同定位方法的优缺点见表3
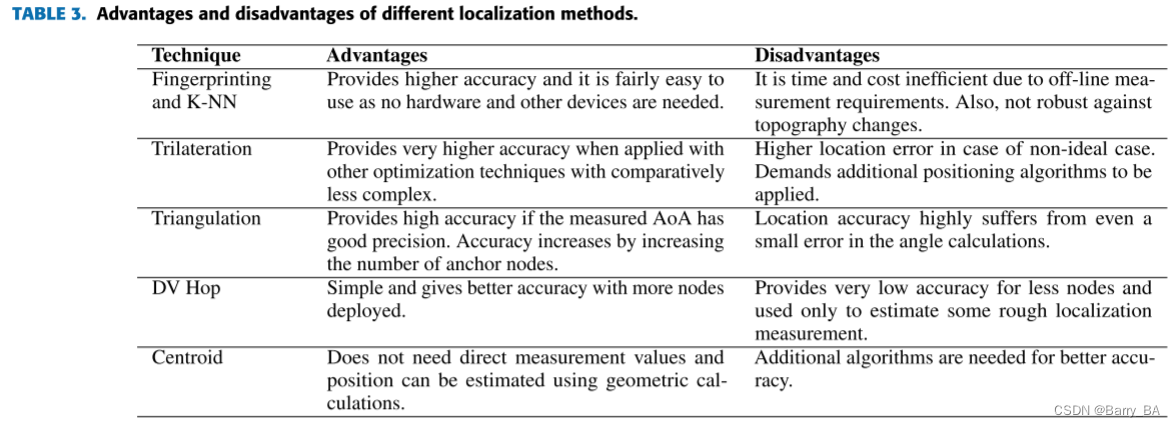
该方法是找到特定跳的跳大小。在得到平均跳数h之后,距离锚节点m跳的节点的距离被简单地计算为m × h。基于所测量的距离,目标节点使用位置估计算法来定位自身。Voronoi图通常用于缩放DV跳算法,以便限制DV跳定位系统中的洪泛范围[52]。通过提升合适的本地化节点来创建额外的锚节点[11]。不同定位方法的优缺点见表3
C. WIRELESS TECHNOLOGIES USED FOR INDOOR LOCALIZATION
在本小节中,简要介绍了室内定位中最常用的射频无线技术。
1).Wi-Fi
由于Wi-Fi系统无处不在,Wi-Fi最广泛用于IPS [53]。它可以提供相当大的覆盖范围,然而,WLAN系统的功耗相对较高[54]。通常,基于Wi-Fi的定位方法是基于三边测量或指纹的。AoA、ToA和基于RSSI的测距技术用于基于三边测量的方法[55]。RSSI和CSI测量通常用于生成指纹图。RSSI更具吸引力,因为RSSI信息可以很容易地从商用接入点(AP)收集,而无需额外的硬件[56]。然而,RSSI的波动往往导致严重的性能下降。在文献中,已经发现许多机器学习方法可以减轻RSSI波动的影响[47],[57],[58]。对于在线阶段K-最近邻(K-NN)中的模式匹配,已使用人工神经网络(ANN)[59],支持向量机(SVM)[60]和K-均值[61]和随机森林[62]算法。测量CSI需要高级网络接口卡(Advanced Network Interface Card,NIC),这会增加额外的成本。然而,基于CSI的指纹识别可以获得厘米级的定位精度[63]。
2).RADIO FREQUENCY IDENTIFICATION DEVICE (RFID)
RFID是一种非常便宜的技术[64]。一般来说,基于RFID的定位技术对环境因素具有持久性,几乎可以用于任何应用。基于RSSI测量的指纹定位方法可用于基于RFID的室内定位系统[65]。Ni等人提出了一种名为LANDMARC的方案[66],其中使用有源RFID来跟踪用户位置。虽然LANDMARC是一个相对长距离的节能系统,但它受到跟踪延迟的影响。Huang等人[67]提出了一种基于有源RFID的实时RFID室内定位系统。他们使用卡尔曼滤波器的漂移消除和苍鹭双边定位估计。Siachalou等人[68]提出了一种基于分阶段指纹的定位系统,用于在仓库和大型零售店中进行跟踪。结果表明,基于相位的指纹识别算法比基于RSSI的指纹识别算法具有更强的抗多径衰落和环境耦合的能力。
3).ZigBee
ZigBee是一种低数据速率的无线个人区域网络[69],[70]。作者在[46]中提出了一种基于指纹的定位系统,其中首先在训练阶段过滤掉干扰数据,然后使用加权最近算法和贝叶斯算法来计算行人的位置。据报道,他们的工作精度为81厘米。Gharghan等人。[71]提出了一种基于ZigBee的定位系统,其中他们使用对数正态阴影模型(LNSM)来估计距离,然后应用自适应神经模糊推理系统(ANFIS)来提高距离估计精度。仿真结果表明,该算法在室内和室外测速情况下,距离估计精度分别提高了84%和99%。Fang等人。[72]提出了一种用于室内环境的基于ZigBee的集成学习定位框架,该框架利用各种算法的优点,对估计结果进行加权,并将其组合以提高准确性。
4).ULTRA WIDE BAND (UWB)
由于UWB是一种短距离无线电技术,可在大带宽上传输短脉冲(<1 ns),因此对多径效应不太敏感,并提供高精度。基于UWB技术的定位系统可实现厘米级(<30 cm)的精度,远优于BLE或Wi-Fi。基于UWB的IPS的主要挑战是NLOS效应。NLOS信号显著降低了定位的准确性。ML技术在文献中获得了大量的研究关注,以区分和减轻NLOS效应[73]。作者在[74]中提出了一种用于在恶劣环境中定位的UWB系统,该系统不需要任何先验知识。在真实的办公室环境中进行的实验中,NLOS缓解后的绝对距离误差的均方根(RMS)从原来的1.3米减小到0.651米。
5).BLUETOOTH LOW ENERGY (BLE)
蓝牙已被视为Wi-Fi的竞争对手,因为大多数智能手机对蓝牙低功耗(BLE)的广泛适应性[45]。BLE可以提供70-100米的覆盖范围,具有高能效[75]。近年来,基于BLE的RSSI指纹技术在研究界得到了广泛的关注。为了提高室内定位的准确性,Yadav等人。[76]提出了惯性测量单元(IMU)传感器和基于BLE信标的定位系统,该系统采用涉及指纹技术和行人航位推算(PDR)的概率方法[77]。这两种方法结合起来,通过一个模糊逻辑卡尔曼滤波器称为可信K最近贝叶斯估计(TKBE)算法。实验结果表明,在大多数实验情况下,他们提出的算法的精度小于一米。作者在[78]中比较了Wi-Fi、BLE和ZigBee与简单的基于RSSI的三边测量方法的性能,发现Wi-Fi、BLE和ZigBee的精度分别为48.6 cm、84.4 cm和91.1 cm。
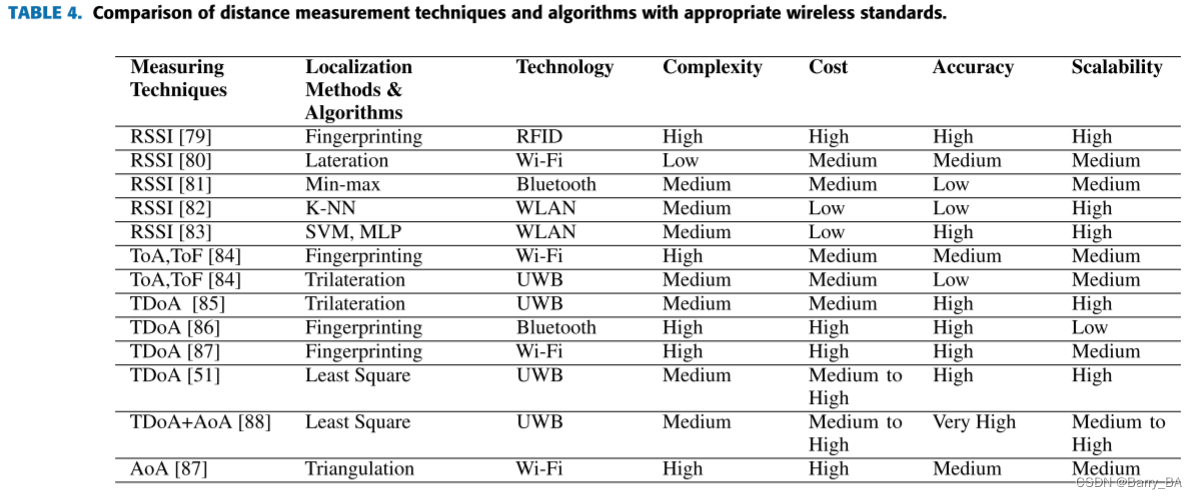
不同测量技术的定位视角沿着不同定位算法和技术关于准确性、成本、复杂性和可扩展性总结在表4中。
III. MACHINE LEARNING FOR IPS
机器学习算法可以有效地解决用于室内环境中的定位的传统技术的许多局限性。传统的方法往往缺乏可扩展性,因此,不能很好地表现在大规模的IPS,如机场,商场和多层建筑物与大型训练数据集。
此外,传统的IPS方法在适应动态变化的环境以及存在多维和异构数据应用方面不是很灵活。
A.MOTIVATION OF USING ML IN INDOOR LOCALIZATION
RSSI的波动是IPS中最具挑战性的问题,它对定位精度产生不利影响。ML最显著的优点是它能够从具有已知或未知统计数据的输入数据中学习有用的信息。例如,递归神经网络可以有效地利用时变RSSI测量的顺序相关性,并使用轨迹信息来减轻RSSI波动[13]。
基于指纹的定位方法的使用和准确性的限制因素之一是存在高维数据和相关的计算复杂性。监督和无监督降维技术,如主成分分析(PCA)[24]和高斯过程流形核降维(GPMKDR)[23]技术,可以应用于将高维特征转换为低维,从而显着降低基于指纹的定位的存储空间和计算复杂度。
强化学习是另一种很有前途的机器学习技术,可以根据定义的学习策略实现快速网络控制。它用于机器人导航,使机器人能够为自己创建一个有效的自适应控制系统,该系统从自己的经验和行为中学习[89]。
IPS模型对不断变化的环境的可扩展性和适应性是特别是在动态变化的室内应用中期望的特征。在这种精神下,迁移学习扮演着重要的角色,因为它使机器学习能够通过与之前学习的东西进行比较,在新的环境中快速学习新的东西。迁移学习可以应用于源域中的数据量足够而目标域中的数据量很小的场景中的室内定位。例如,迁移学习机制可以应用于基于指纹的定位,以增强系统的可扩展性,而无需过多的现场调查,并且在缺乏标记数据时不会牺牲准确性[29]。除了迁移学习之外,深度学习技术在复杂环境场景中增强本地化方面也显示出巨大的潜力。具体而言,在难以提取和建模非线性相关特征的情况下[14]。
此外,提出了各种技术,例如基于贝叶斯估计的概念,包括卡尔曼滤波器[90],[91];无迹卡尔曼滤波器[92];非贝叶斯方法,例如最小二乘(LS)[93]-[96];子样本插值[97],[98]和反卷积近似[99],用于通过减轻多径传播误差来改进定位。贝叶斯方法在定位精度上优于其他传统算法。
室内环境下传感器数据的融合是实现精确定位的重要手段,这在很大程度上依赖于有效的数据融合技术。传统的数据融合方法包括LS [93]-[95]和MMSE [96],这些方法都不是很有前途。它需要在定位测量中的概率分布的知识,这在真实的应用中往往是不可能的。此外,LS方法并不完美,因为噪声被平方放大,并且LS在方程中涉及额外的变量。基于最大后验(MAP)估计器[100]和MMSE [96]的混合定位算法显示出一些性能改进,但以计算复杂度为代价。ML算法在动态、不确定环境下处理多维和多种类数据方面特别出色。它可以被有效地训练以融合从多个定位传感器、技术和方法获得的结果。
贝叶斯方法集成了多模态位置传感器,并通过递归跟踪过程利用历史数据[101]。特别地,卡尔曼滤波器已经被用于[102]-[104]基于先前的测量来估计最可能的当前位置,假设高斯噪声和线性运动动态。然而,无监督ML融合技术在实际场景中使用更现实,因为它利用在线测量来实时计算权重,并且不需要在离线阶段进行训练。
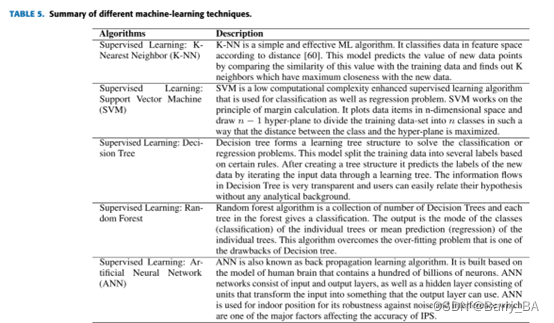
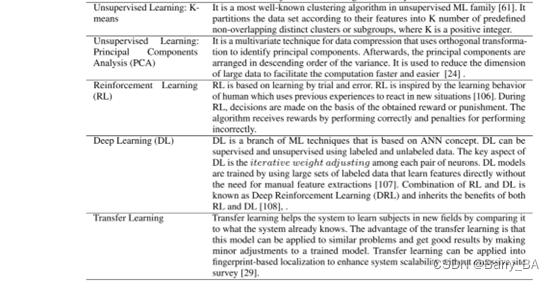
在下面的部分中,我们将详细讨论用于克服各种室内定位挑战的不同ML技术。此外,不同ML技术的总结见表5。
B.SPECIFICS OFML TECHNIQUES IN LOCALIZATION
在定位中,分类器算法主要用于提取信号的核心特征。在指纹方法聚类的基础上,这些提取的功能。特征提取对于NLOS识别和缓解也很重要。K-NN [109],支持向量机(SVM)[110],随机森林,决策树,人工神经网络(ANN)[111]是广泛使用的分类算法。
数据映射和过拟合是基于指纹的定位系统面临的最大挑战。K-NN算法在指纹识别技术中有着广泛的应用。然而,K-NN不能很好地处理大数据集和高维数据。在嘈杂的不规则环境(如地下矿山和地铁站)中,由于存在时变衰减和噪声因素,RSSI表现出高维性[112]。在这种情况下,SVM更有效,因为它采用核机制来找到两个单独类的两个点之间的差异,并以更好的泛化性能对线性和非线性关系进行建模[17]。然而,基于支持向量机的方法是耗时的,需要大量的内存时,支持向量(SV)的数量变得很大。基于决策树的室内定位在提高定位精度方面比其他分类(如K-NN和神经网络)提供更好的性能[113]。然而,当决策树处理连续数值数据并进行分类时,存在信息丢失的可能性。
在实际的指纹识别场景中,在离线阶段生成的指纹图包含大的数据集。因此,将在线阶段获取的数据与指纹图的每个数据点进行比较是耗时的。因此,指纹图被划分为多个簇,并且目标节点的数据仅与对应的簇中心的数据点进行比较。因此,选择具有最高匹配的聚类。然后,仅将所获取的数据与匹配簇内的数据进行比较,并且执行位置估计。如果聚类后每个组中的参考点数量仍然很大,或者决策中的层数无法减少,那么很可能会出现过拟合的问题。在这种情况下,可以使用随机森林来消除过拟合问题。ARF模型是基于聚类后组中参考点的指纹信息构建的[114]。
此外,在指纹定位技术中重要的是,每个参考点必须在所提取的特征方面表现出与其他参考点至少一个差异。然而,经常看到一些特征没有信息或重复来自其他特征的冗余信息。在这种情况下,降维对于降低模型的复杂度、缩短训练周期和保存存储空间具有重要意义。在高维数据的情况下,主成分分析(PCA)是有益的,因为它简化了高维数据的复杂性,同时保留趋势和模式。PCA主要用于降维和缩小无线电地图以节省存储空间[24]。
然而,在特征提取困难且数据具有高维数的复杂环境场景中,DL非常有希望提高定位精度[21]。DL以其分布式计算能力和分析大量未标记和未分类数据而闻名。DL算法的最大优点是能够直接从数据中提取特征,而无需手动提取特征[107]。这消除了领域专业知识和核心功能提取的需要。特征提取和分类由称为卷积神经网络(CNN)的DL算法进行[115]。
许多室内定位方法容易受到全球定位误差和绑架机器人问题的影响。全局定位问题发生在目标的初始位置是未知的IPS在初始化期间。而当目标移动到未知环境时,就会发生绑架机器人问题。在这种具有挑战性的情况下,RL被证明是最好的技术。RL使智能体能够通过与环境交互(基于奖励和惩罚过程)来实现长期目标,并且能够解决无线电信号不稳定引起的问题。因此,RL技术能够构建地图并不断优化其动作[116]。
ML技术在解决室内定位中的各种挑战方面的应用如表6所示。

IV. EXISTING ML BASED ENHANCEMENTS TO IPS
在本节中,我们将调查现有的基于ML的解决方案,以解决室内定位中的不同挑战。
A.ML FOR NLOS ERROR MINIMIZATION
室内定位的主要挑战之一是由NLOS/多径传播引起的大的测距误差。因此,必须减轻这种影响。在文献中,大量的工作已经发现NLOS问题。现有文献通常以两种方式处理NLOS缓解:
- 识别NLOS传播,进而抑制NLOS引起的距离误差。
- 不进行NLOS识别而直接减轻NLOS影响。
在NLOS识别中,目标是通过分析信道统计、距离估计或无线电地图来区分发射机和接收机之间的NLOS信号和LOS信号[128]。
在文献中,不同的ML方法已被应用于从接收信号/波形中提取不同的特征并对NLOS/LOS分量进行分类。为此,在[17]中,Stefano等人开发了基于最小二乘支持向量机的技术,用于NLOS识别和缓解,不需要任何显式统计模型。从接收波形中提取了接收信号能量、上升时间、接收信号最大幅度、平均剩余时延、均方根时延扩展和峰度等不同的特征,并构造了不同长度的特征子集。作者设计了三种本地化策略:
1) 仅考虑LOS信号进行定位的识别。
2) 识别和抑制,对NLOS和LOS信号进行分类,然后抑制NLOS信号的距离估计误差。
3 )在存在足够数量的LOS信号的情况下丢弃减轻的NLOS距离估计的混合方法。
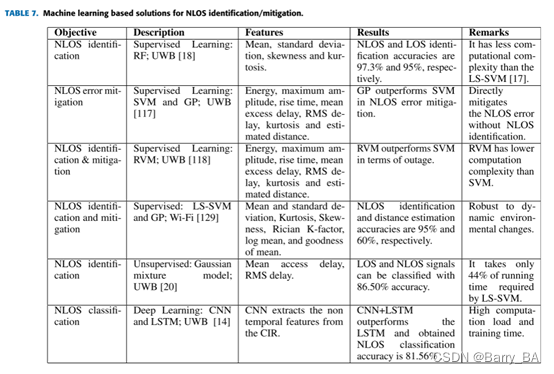
实验结果表明,该识别策略利用接收信号能量、上升时间、峰度等特征子集成功地对NLOS/LOS进行了分类,识别准确率达到91%。识别和缓解策略实现中断概率(即误差小于2米)约10%,没有任何LOS信号的存在下,而混合的方法进一步提高了性能,特别是在存在大量的LOS信号。在[18]中,Ramadan等人提出了一种基于随机森林的NLOS识别方法,其中信道脉冲响应(CIR)用于特征提取。作者从接收信号中提取了许多特征,包括均值、标准差、偏度和峰度来训练随机森林算法。在实验中,作者通过将发射器和接收器放置在1.6m高的宽大厅的不同位置来估计CIR。作者使用了两个指标:识别精度和算法运行时间,以评估随机森林算法与最小二乘支持向量机(LS-SVM)[19]和其他最先进的分类算法的性能。实验结果表明,随机森林算法在计算复杂度合理的情况下,NLOS和LOS的识别准确率分别达到97.3%和95%。
Henk等人[117]提出了两种非参数回归技术,用于减轻直接从接收波形中提取的特征的测距误差。第一种技术采用SVM回归,第二种技术采用高斯过程(GP)回归。所提出的技术的性能进行了评估的中断。结果表明,GP错误缓解具有良好的性能,与中断保持在10%以下的所有NLOS。
Nguyen等人。[118]提出了基于相关向量机(RVM)的UWB ToA定位方法。在他们提出的模型中,基于RVM的分类器用于识别LOS和NLOS信号。然后,采用RVM回归器进行测距误差预测。比较了RVM和SVM在NLOS识别和定位精度估计中的性能。实验结果表明,在使用3种特征的情况下,当使用的相关向量和支持向量分别为50和12时,SVM和RVM分类器的误识概率分别为0.1143和0.1084。结果表明,在63.37%的情况下,RVM实现定位误差小于1米,而相应的百分比SVM为58.48%。
目前正在进行的NLOS识别和缓解技术的研究主要针对UWB无线电信号[117],[118]。由于UWB信号的大带宽意味着短的时域脉冲,因此可以容易地识别LOS分量。因此,这些技术不能容易地应用于诸如Wi-Fi的窄带通信技术。本着这种精神,Xiao等人。[129]提出了两种ML和一种假设检验算法,使用来自接收信号的RSSI测量值进行Wi-Fi系统中的NLOS识别和缓解。他们提出的最小二乘支持向量机分类器(LS-SVMC)和高斯过程分类器(GPC)识别NLOS信号,而最小二乘支持向量机回归器(LS-SVMR)和高斯过程回归器(GPR)执行NLOS缓解。在各种室内环境中进行广泛的实验,发现他们提出的技术可以区分LOS/NLOS条件,准确度约为95%。仿真结果表明,在训练数据较少的情况下,GPR的性能略优于LS-SVMR。LS-SVMR和GPR的平均误差分别为0.86 m和0.82 m。
在上述作品[17],[18],[117],[118]中,作者首先通过分析信号属性来定义和提取各种特征,然后将它们用作分类器的输入向量(例如,SVM、MLP)。峰度、峰值到导联延迟、平均超额延迟和RMS延迟扩展是NLOS/LOS识别中最常用的特征。然而,在复杂的环境中,很难手动定义的功能。为了克服这个问题,Jiang等人[14]提出了一种用于UWB NLOS检测和分类的DL方法。该方法是基于卷积神经网络(CNN)和长短期记忆递归神经网络(LSTM-RNN),其中CNN被用来从原始信道脉冲响应(CIR)中提取非时间特征。然后,将CNN中提取的特征输入LSTM,用于对LOS和NLOS信号进行分类。结果表明,与单个LSTM相比,CNN-LSTM在NLOS分类方面优于LSTM。[73]的作者还使用CNN在具有多个锚节点的UWB IPS中进行准确的位置估计。
虽然监督ML在文献中被广泛用于识别NLOS信号,但在环境经常由于家具从一个位置移动到另一个位置而发生变化的情况下使用并不太可行。为了克服这一限制,Fan等人。[20]提出了一种无监督的方法,称为高斯混合模型的期望最大化(EM-GMM),它可以区分LOS和NLOS分量。特别地,他们在GMM上应用EM来找到接收信号的最大似然,以确定它是否属于LOS或NLOS分布。此外,作者发现,他们提出的算法实现了与监督学习算法几乎相同的NLOS检测精度,而它只需要它们所需的运行时间的44%。EM-GMM的主要优点是它不需要在某个位置对数据库进行任何严格和明确的标记。
表7显示了不同ML方法在NLOS分类和缓解方面的性能。
- LESSONS LEARNED
首先,基于[118]和[17],[117],我们观察到RVM分类器在NLOS识别和缓解方面的性能优于SVM。此外,RVM使用比SVM中的支持向量的数量更少的相关向量。从这些观察结果可以推断,RVM [118]在NLOS识别和缓解方面优于SVM。其次,根据[14],DL可以用于在具有时变信道脉冲响应(CIR)的动态网络环境中直接提取用于NLOS/LOS分类的特征。第三,基于[20],无监督ML方法对于在没有标记数据的未知环境中分类NLOS和LOS信号分类是有用的。
B.ML FOR ENHANCED FINGERPRINTING BASED LOCALIZATION
1.降低操作复杂性并保存成本
为了降低多层建筑物的基于指纹的定位的计算复杂度并保存存储空间,作者在[130]中提出了针对每层的基于K-均值的方法。将观察向量与每个楼层的簇头(CH)进行比较以决定正确的楼层。在第二阶段中,比较是用地板方式进行的。在该模型中,服务器仅将簇头信息及其对应的楼层标签发送到客户端,这显著降低了复杂度。
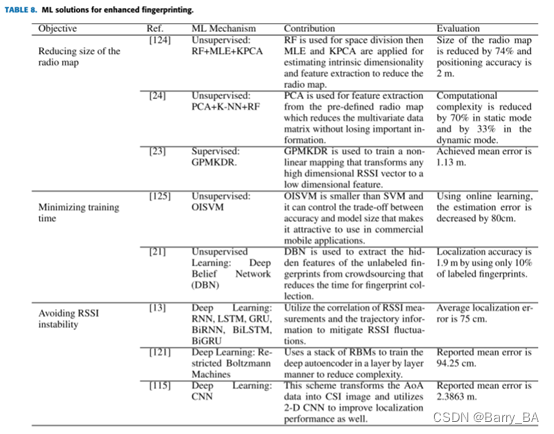
Mo等人[124]提出了一种基于随机森林的空间划分模型,其中整个无线电地图首先被划分为多个子无线电地图。然后,最大似然估计(MLE)和核主成分分析(KPCA)分别用于估计每个子无线电地图的本征维数和提取特征。结果表明,他们提出的方法减少了74%的无线电地图的大小沿着与噪声抑制,并达到98%的粗定位精度。
Salamah等人。[24]提出了一种主成分分析(PCA)方法,以提高性能并降低Wi-Fi室内定位系统的计算成本。结果表明,[24]中提出的方法可以使用RF将计算复杂度降低70%。
Jia等人[23]提出了一种基于监督学习的高斯过程流形核降维(GPMKDR)方法。在所提出的方法中,原始RSSI测量值及其位置标签首先由GPMKDR在离线阶段处理。GPMKDR用于训练将任何高维RSSI向量转换为低维特征的非线性映射。结果表明,GPMKDR显着提高定位性能相比,PCA为基础的方法。
2. 最大限度缩短培训时间
Le等人。[21]提出了一种基于机器学习的室内位置模型,通过对未标记的RSSI测量应用深度置信网络(DBN)来减少指纹识别的工作量。DBN提取指纹的隐藏特征,从而最小化指纹的收集。在本文中,使用预训练阶段来训练无监督深度特征学习模型。然后,该模型被用来提取标记指纹的深度特征进行定位估计。提取的特征被用作传统的回归和分类技术,如SVM和K-NN的输入。实验结果表明,该方法仅使用10%的标记指纹,比基线方法使用100%的标记指纹的定位精度提高了1.9m。
Wu等人。[125]提出了一种使用来自Wi-Fi信号的RSSI的基于在线独立支持向量机(OISVM)分类的定位方法。与传统的SVM相比,OISVM能够在线学习,并与众包无缝协作。此外,OISVM的模型大小比SVM小,它可以控制精度和模型大小之间的权衡。这些特性使得OISVM在商业移动的应用中具有吸引力。在离线阶段,所提出的方法开发了一个新的核选择参数,以减少时间成本。因此,该方法的训练时间可以比传统方法快得多。在在线阶段,对新的RSSI样本进行位置估计,同时在新的训练数据到达时进行在线学习,这些数据可以通过众包收集。结果表明,[125]中提出的方法显着减少了预测时间和训练时间,并实现了0.8 m的定位精度误差。
3.最小化信号波动
在基于指纹的定位中,RSSI被广泛使用。然而,由于信道NLOS/多径传播和设备异构性,RSSI测量值非常不稳定。
为了减轻RSSI波动并提高定位的准确性,作者在[120]中提出了一种基于归一化秩的SVM,其实现了房间级准确性。本着同样的精神,Hoang等人。[13]提出了一种基于递归神经网络(RNN)的Wi-Fi指纹识别解决方案,该解决方案利用了来自时变RSSI和轨迹信息的RSSI测量值的相关性。作者使用了不同类型的RNN,包括Vanilla RNN,LSTM,GRU,Bidirectional RNN(BiRNN),Bidirectional LSTM(BiLSTM)和Bidirectional GRU(BiGRU),并评估了这些算法的性能。结果表明,LSTM结构实现了0.75 m的平均定位误差,优于前馈神经网络,K-NN,卡尔曼滤波器和其他概率方法。
为了克服RSSI波动在基于指纹的定位中的负面影响,研究人员提出了基于信道状态信息(CSI)的指纹,其中在离线阶段记录不同参考点处的CSI水平。作者在[121],[122]中开发了一种基于深度学习的方法,称为DeepFi,以提高基于指纹的定位的准确性,该方法使用来自所有子载波的CSI幅度。DeepFi系统架构包括离线训练阶段和在线本地化阶段。在离线训练阶段,DL用于将深度网络的所有权重训练为指纹。在离线训练阶段,DeepFi采用了贪婪学习算法,使用一堆受限玻尔兹曼机(RBM)以逐层的方式训练深度网络。在在线定位阶段,提出了一种基于径向基函数(RBF)的概率数据融合方法来获得估计位置。结果表明,DeepFi在不同的网络场景中优于现有的几种基于RSSI和CSI的方案。
在[115]中,作者提出了基于深度卷积神经网络(DCNN)的CiFi和商品5GHz Wi-Fi。CIFI收集CSI数据并扫描稍后用于估计AoA的相位信息。估计的AoA被转换为CSI图像。这些图像用于在离线阶段训练DCNN。在在线阶段,基于训练的DCNN和新的AoA预测目标的位置。使用CSI和RSSI,Hsieh等人。[123]提出了一种基于多层感知器(MLP)和一维卷积神经网络(1D-CNN)的基于DL的方法来估计对象的位置。实验结果表明,一维CNN网络具有较好的定位性能,且网络复杂度较低。我们在表8中总结了本小节中提到的解决方案。
4.教训
首先,基于[130],在多层建筑物的基于指纹的定位中逐层应用K-means算法,显著降低了计算复杂度。其次,根据[24],PCA和KPCA显着减少了无线电地图的大小以及计算复杂度。第三,基于[23],我们可以得出结论,在存在标记位置数据的情况下,高斯过程流形核降维(GPMKDR)优于PCA降维。第四,从[21]中,深度信念网络(DBN)可以应用于从众包指纹中提取未标记数据的隐藏特征,从而消除了在基于指纹的定位中过度收集无线电地图的需要。它在环境变化非常频繁的情况下也很有用。第五,在[125]之后,当系统与众包无缝合作并动态更新训练数据时,训练时间可以显着减少。最后,根据[121],[122],自动编码器能够从RSS数据或CSI数据中提取有用和鲁棒的信息,并提高定位精度。
C. ML FOR TRAJECTORY LEARNING
基于指纹的室内定位方法需要先前的无线电地图。因此,当先验地图不可用时,已经设计了基于轨迹学习的定位方法,例如SLAM [131]-[133]和众包[134],[135]。在基于轨迹学习的定位方法中,空间背景(如地图和地标)用于校准定位误差,而无需额外的硬件[119],[136]。
为了处理无线电地图不可用时的场景,Yoo等人。[119]提出了一种基于ML的无地图室内定位模型,用于基于Wi-Fi的系统,其中智能手机用于收集RSSI。该模型结合粒子滤波和高斯过程(GP)的位置估计,并在两个阶段的工作。在第一阶段,该算法分析从人群中收集的Wi-Fi信号的模式,并检测任何地标的起点和终点。然后,它采用线性判别分析(LDA)和PCA的降维和聚类数据点从不同的地标。在第二阶段,作者应用了动态包裹阶段,该算法分析从人群中收集的Wi-Fi信号的模式,并检测任何地标的起点和终点。然后,它采用线性判别分析(LDA)和PCA的降维和聚类数据点从不同的地标。在第二阶段,作者应用动态包裹与卡尔曼平滑匹配不同的长度和时间同步的样本。最后,作者应用GP和粒子滤波器的位置估计。实验结果表明,该模型能够获得准确的定位结果,且参与者的姿态不影响定位效果。之后,作者还将他们在[135]中的工作扩展到地标和地板检测。
D. ML FOR ROBOTNAVIGATION
移动的机器人在复杂环境中的自主导航是一项艰巨的任务。智能机器人系统的安全和鲁棒导航需要识别障碍物及其位置信息[138]。在实际场景中,这些信息事先是不可用的。需要高水平的感知能力来获取这些信息。DL,RL及其组合称为深度强化学习(DRL),在解决机器人技术的许多挑战方面表现出巨大的潜力[137]。
为了在机器人导航期间探索未知环境,Tai等人[22]提出了一种基于深度Q网络(DQN)的学习模型,其中卷积网络用于从RGB-D传感器中提取特征。经过一定次数的训练后,机器人可以自主地在新的环境中行走。Wang等人。[127]提出了一种使用双流Q网络的DRL架构,用于动态环境中的导航任务。该架构将主任务分为两个子任务:局部避障和全局导航。它分别处理空间和时间信息以避免障碍物,并生成动作值。全局导航子任务由传统的Q网络框架解决。引入在线学习网络和动作调度器,将两个预先训练好的策略进行联合收割机组合,然后继续探索和优化,直到得到一个稳定的策略。
E. ML FOR FUSING TECHNOLOGIES, FEATURES ANDALGORITHMS
创新和满足消费者期望在很大程度上取决于技术与适当应用的正确匹配。在选择设计合适的IPS平台之前需要考虑两点:a)最适合IPS的技术; b)折衷IPS指标(即,准确性、精确度、复杂性、可扩展性、鲁棒性和成本),以实现所需的结果水平。值得注意的是,IPS平台依赖于应用程序,可能需要不同的技术和性能指标。例如,一些应用可能需要中等水平的准确度,而一些应用(诸如工业过程跟踪和用于盲人的室内导航系统)需要高准确度。
每种定位技术和技术都比其他技术具有一定的优势。有时,多种技术和技术结合在一起,以在特定应用中实现令人满意的解决方案[139],[140]。融合不同技术、技术和算法的信息可以提高整个系统的准确性和鲁棒性。ML技术可以有效地融合这些信息,以提高定位精度,系统鲁棒性,并减少LBS系统解决方案的整体投资。问题是如何使用从不同技术和工艺中获得的信息,以及如何权衡从不同算法中获得的结果以做出最终决定。
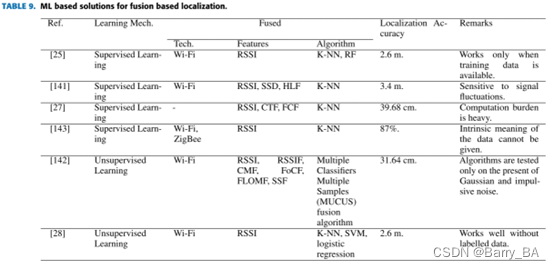
在文献中,我们发现可以通过对多个算法的输出进行平均来生成权重[25]或采用最佳算法的权重[25],[141]。前一种方法的权重选择往往是负偏的最坏的算法的输出。后者只有在训练数据可用时才能采用。如果不在离线阶段训练算法,则可能无法确定最佳算法。因此,有两种策略来获取权重:监督权重学习和无监督权重学习。监督学习试图通过使用离线阶段的标记数据来学习权重[25]。另一方面,无监督学习通过直接使用在线数据来学习权重[26]。
为了提高定位精度,作者在[27]中提出了一种用于室内环境中精确定位的级联两阶段ML方法,该方法自适应地组合了不同的射频(RF)特征,例如接收信号强度指示符(RSSI)、信道传递函数(CTF)和频率相干函数(FCF)。在第一阶段,所提出的方法使用ML来识别周围室内环境的类型。然后,作者应用K-NN算法来确定最合适的RF特征的选择和组合。实验结果表明,在实验室环境中使用该框架的定位误差,RMSE为39.68厘米。
在动态环境变化下,单一的基于RSSI或CIR的指纹识别方法不能达到预期的性能。因此,一组指纹被用来提高准确性。为此,Gu等人。[141]通过开发全局融合配置文件(GFP)提出了一种基于Wi-Fi的定位方法,称为Wi-Fi-FAGOT。在离线阶段,Wi-Fi-FAGOT首先构建一组称为GOOF的指纹,由RSSI,信号强度差(SSD)和双曲位置指纹(HLF)组成。GFP的构建是通过最小化所有GOOF分类器的空间上的平均定位误差。因此,构建的GFP可充分利用不同种类指纹之间的互补性。GFP通过充分利用所有指纹而无需修改任何硬件来提高定位的准确性,因此非常有希望用于Wi-Fi环境中的室内定位。结果表明,在真实的复杂室内环境中,WiFi-FAGOT系统的性能优于其他系统。
在[142]中,作者基于RSS指纹(RSSFs)、协方差矩阵指纹(CMFs)、四阶累积量指纹(FoCF)、分数低阶矩指纹(FLOMF)和信号子空间指纹(SSFs)构建了GOOF,这些指纹可以通过对多个天线处的接收信号进行不同变换来获得。然后,设计了一种基于AdaBoost的并行GOOF多分类器(GOOF-AdaBoost)来训练多个强分类器,并提出了一种有效的融合算法MUCUS(Multiple Classifiers Multiple Samples)来提高定位精度。多分类器结合了多个分类器对不同样本的预测。结果表明,MUCUS的定位误差为31.64cm。
后来,通过使用GFP,作者在[25]中提出了一种基于监督权重学习的知识辅助自适应定位(KAAL)方法。作者开发了两种KAAL算法,基于GFP的多函数平均(GFS-MFA)和基于GFP的最优函数选择(GFS+OFS),以实现高精度的定位结果。GFS-MFA根据多个指纹函数输出的平均值来选择权重,而GFS+OFS则试图在离线阶段基于最佳指纹函数的输出来获得权重。他们使用四种典型的指纹融合:神经网络(NN),K-NN,ELM和随机森林来测试这些算法的性能。实验结果表明,GFS+OFS算法的性能优于GFP+MFA等传统算法。
上述监督融合方法在多径和变化的环境中不能很好地执行[25]。为了克服这个缺点,Guo等人[28]提出了一种基于扩展候选位置集(UFL-ECLS)的无监督融合定位方法。在该方法中,在离线阶段使用RSSI指纹训练多个分类器。然后,在在线阶段,通过从每个分类器中找到预测概率大于一定阈值的位置来构建扩展的候选位置集。UFL-ECLS通过最小化定位误差迭代更新目标的权重和位置。实验结果表明,与KAAL相比,UFL-ECLS可以将第67百分位数RMSE(均方根误差)降低16.5%[25]。
为了最小化由于频繁的AP扫描而导致的启用Wi-Fi的设备的高能耗,Niu等人提出了ZIL [143],这是一种节能的室内定位系统,其中ZigBee接口用于收集Wi-Fi信号。为了从ZigBee接口识别Wi-Fi AP,他们开发了RSSI量化和RSSI归一化。为了提高定位精度,分别采用加权欧氏距离、加权曼哈顿距离和相对熵三种不同的距离度量,对三种基于K-NN的定位方法进行了评价。实验结果表明,ZIL定位准确率可达87%,与现有的基于Wi-Fi指纹的方法相比具有竞争力;与单纯基于Wi-Fi接口的方法相比,ZIL平均可节省68%的保存能量。
综合利用Wi-Fi信号和运动传感器是改善位置估计的有效方法。为了提高定位精度,作者在[126]中提出了一种融合定位框架,其中使用极端学习机(ELM)回归算法来预测基于运动传感器的位置。然后,Wi-Fi指纹定位结果被用来解决粒子滤波运动传感器的误差积累。我们在表9中总结了本小节中提到的解决方案。
1.教训
将来自不同技术和技巧的信息与适当的权重融合是我们研究的另一个领域。这里,整体融合权重可以是从多个算法获得的权重的平均值,或者它们可以是最佳算法的权重。然而,平均权重可能会受到最差算法的严重影响,并且不容易找到最佳算法来选择最佳权重。此外,通常不可能提前获得标记数据。此外,权重需要定期更新以应对环境变化。因此,无监督学习方法[28]比监督学习方法[25]更有吸引力,可以在室内定位中获得最佳融合权重。
V. APPLICATIONS OF INDOOR LOCALIZATION
近年来,室内定位的进步和智能便携式设备的激增促进了广泛的基于位置的服务(LBS)。
A. CONTEXTUAL-AWARE LOCATION BASED MARKETING
情境感知的基于位置的营销是电子商务中的一个革命性的想法,它有可能提高销售和利润。这种类型的营销有助于卖家在真实的时间到达消费者,并增强他们的购物体验。这一点在技术进步的今天尤其重要,因为几乎每个人都拥有智能移动的设备。对个性化移动的设备的广泛访问允许基于位置、社交简档、消费模式、导航历史、在线行为、浏览模式和倾向(他们在社交媒体上“喜欢”和“关注”的主题)的定制营销方法。这种营销策略的目的是从个人兴趣,过去的购物历史,请求的反馈,电子邮件提醒中得出结论,然后从靠近消费者位置的商店向他们发送相关广告和优惠券。
室内定位系统是基于位置的营销以及其他LBS的组成部分。定位系统允许在室外和室内对移动终端进行地理定位。基于位置的营销应用中最常用的技术包括GPS定位的地理围栏,蓝牙信标RFID和Wi-Fi。
B . TRACKING MINING WORKERS
由于煤矿井下事故多、死亡人数多,目前法律的要求对所有煤矿工人进行连续跟踪。这是2006年《矿山改善和新应急反应法》(MINER)规定的。因此,采矿业正在积极寻求开发各种解决方案来跟踪地下矿山中的矿工[144]。虽然基于区域的RFID定位[145]在矿山中很普遍,但研究了几种新技术,包括定向天线[146],波束成形泄漏馈线[147]和ML算法[112],以提高可靠性和准确性。
C. INVENTORY TRACKING
LBS不仅仅是关于人的。在某些情况下,需要自动跟踪大型仓库和工厂中的大量物品[148]。在这种情况下,不仅需要定位和识别,还需要真实的管理这些项目的位置。因此,除了本地化技术和数据库管理之外,还需要新的媒体访问控制层协议来确保所有这些项都被正确识别而没有冲突和阻塞[149]。这里通常需要深度学习技术来处理庞大的数据[73]。
D. AMBIENTASSISTED LIVING
准确的室内定位是环境辅助生活平台的基础。这些系统为老年人、体弱者或残疾人提供帮助,使他们能够在家中、社区和公共场所舒适地生活。受神经退行性疾病影响的老年人需要进行行为跟踪,包括监测日常活动、检测日常运动模式、记录生命体征和检测危险事件(跌倒、受伤)等[150]。包括Wi-Fi和蓝牙在内的许多IPS技术都可以在此应用中使用。
E. DISASTER RECOVERY
在火灾和地震后室内人员被困的情况下,室内定位技术可以确定处于危险中的人员的具体位置,并在最短的时间内将他们从建筑物中救出。由于救援人员通常不知道室内环境,因此很难计算被困人员的确切人数并安全地营救他们。无需事先测量、校准、配置和部署的定位系统可能是救援部队的最佳工具。在极端情况下,内置的通信设施也可能因灾难而崩溃。在这种情况下,上下文感知定位可以改变游戏规则[151]。
F. PUBLIC SAFETYAND LAWENFORCEMENT
有效的室内定位可以精确定位建筑物/设施内的危险位置和来源[152],以便在一开始就减轻和管理灾难。例如,警方一直使用基于蓝牙信标的室内定位技术,安装在校园建筑物和露天场所,以帮助确定紧急情况,使警方能够及时作出反应,避免不必要的阻碍和延误。室内定位技术可以更上一层楼,开发应用程序,检测爆炸物的位置,被盗物品在建筑物内,以协助训练有素的警犬,炸弹小组或为濒危个人在烟雾弥漫的环境中找到最近的紧急出口。
E. HEALTH SERVICES
室内定位具有巨大的潜力,可以通过多种方式提高医疗保健部门的服务质量。IPS可以帮助前端工作人员在拥挤的医院中及时找到患者[153]。患者还可以通过室内导航自己找到治疗室。医生可以跟踪病人的移动和安全。来访者可以毫不费力地在医疗设施中找到他们的病人。即使是轮椅和专门的手术设备也可以很容易地在手术室内找到。

















 156
156

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









