






ROS机器人小车建模仿真与SLAM
实验要求:
一 . 参考网上资料,在ROS中完成一个机器小车的模型创建,传感器配置,仿真环境的设置,并控制机器小车进行运动。
urdf模型搭建参考:https://www.cnblogs.com/IT-cute/p/12990162.html
1. URDF文件简介(unified Robot Description Format统一机器人描述性格式)
- URDF描述规格:
用一个文件描述一个机器人模型
文件的后缀为.urdf
文件的内容格式为XML格式
XML根节点为robot
inertial 定义惯性
geometry 用来描述模块的形状和大小
origin 用来描述模块的位置;
material 并且设置 color 上色
material 指定颜色rgb和透明度a. 它们取值范围都是[0,1] 区间2
2.建模
-
创建简单的机器人模型-四轮小车
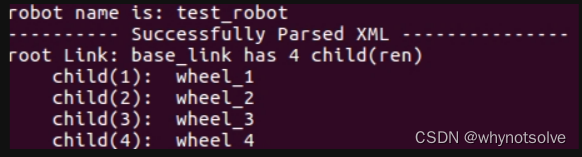
/安装urdf_tutorial包 sudo apt-get install ros-kinetic-urdf-tutorial/创建ros工作空间 mkdir myrobot/src -p cd myrobot/src catkin_init_workspace cd .. catkin_make/在myboot.urdf文件里面填入以下代码 <robot name="test_robot"> <link name="base_link"> <visual> <geometry> <box size="0.2 .3 .1"/> </geometry> <origin rpy="0 0 0" xyz="0 0 0.05"/> <material name="white"> <color rgba="1 1 1 1"/> </material> </visual> </link> <link name="wheel_1"> <visual> <geometry> <cylinder length="0.05" radius="0.05"/> </geometry> <origin rpy="0 1.5 0" xyz="0.1 0.1 0"/> <material name="black"> <color rgba="0 0 0 1"/> </material> </visual> </link> <link name="wheel_2"> <visual> <geometry> <cylinder length="0.05" radius="0.05"/> </geometry> <origin rpy="0 1.5 0" xyz="-0.1 0.1 0"/> <material name="black"/> </visual> </link> <link name="wheel_3"> <visual> <geometry> <cylinder length="0.05" radius="0.05"/> </geometry> <origin rpy="0 1.5 0" xyz="0.1 -0.1 0"/> <material name="black"/> </visual> </link> <link name="wheel_4"> <visual> <geometry> <cylinder length="0.05" radius="0.05"/> </geometry> <origin rpy="0 1.5 0" xyz="-0.1 -0.1 0"/> <material name="black"/> </visual> </link> <joint name="joint_base_wheel1" type="fixed"> <parent link="base_link"/> <child link="wheel_1"/> </joint> <joint name="joint_base_wheel2" type="fixed"> <parent link="base_link"/> <child link="wheel_2"/> </joint> <joint name="joint_base_wheel3" type="fixed"> <parent link="base_link"/> <child link="wheel_3"/> </joint> <joint name="joint_base_wheel4" type="fixed"> <parent link="base_link"/> <child link="wheel_4"/> </joint> </robot>如下显示即为成功:
3.书写launch文件
在launch文件夹下建立car01.launch文件,里面输入如下代码:
<!-- -->
<launch>
<param name="robot_description"
textfile="$(find little_car)/urdf/car01.urdf"/> // 这一行需要更改为自己urdf文件所在位置
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher"/>
<node name="rviz" pkg="rviz" type="rviz" respawn="false" output="screen"/>
</launch>
4.启动launch
roslaunch smartcar car01.launch
最后: 在rviz里面将Fixed Frame 改为: base_link,并点击Add添加 Robotmodel 即可查看自己构建的模型
关于SLAM的实现,它通常依赖于多种传感器数据,如激光雷达或摄像头等。这些传感器能够获取环境的几何信息或图像信息,为机器人的定位和地图构建提供数据支持。
在基于激光的SLAM方法中,激光雷达被用于获取环境的点云数据。通过对点云数据的处理和分析,机器人能够识别出环境中的障碍物、墙壁等特征,并据此进行定位和地图构建。
而在基于视觉的SLAM方法中,摄像头则扮演着重要角色。通过图像处理和计算机视觉算法,机器人可以从图像中提取特征点,并利用这些特征点之间的匹配关系来计算相机的运动和地图的构建。这种方法对光照条件和图像质量有一定的要求,但在光照条件良好的情况下,能够实现高精度的定位和地图构建。
此外,还有一些算法如粒子滤波定位技术、gmapping等,也被广泛应用于SLAM中。这些算法能够根据机器人的运动模型和传感器的反馈信息,对机器人在地图上的位置进行估计,并不断优化和更新地图。
SLAM算法可以根据不同的标准进行分类。以下是一些常见的分类方式:
-
基于数据类型:
- 基于滤波器的SLAM:这类算法使用概率滤波器(如扩展卡尔曼滤波器、粒子滤波器等)来进行位置估计和地图更新。
- 基于优化的SLAM:这类算法则使用非线性优化方法(如图优化、BA优化等)来进行位置估计和地图更新。
-
基于传感器类型:
- 基于视觉的SLAM算法:如ORB-SLAM、LSD-SLAM、PTAM、SVO、DTAM等。这些算法主要依赖摄像头作为感知设备。例如,ORB-SLAM是一种快速、鲁棒的2D和3D SLAM算法;LSD-SLAM是一种单目摄像头的SLAM算法;PTAM是一种实时、鲁棒的单目摄像头SLAM算法;SVO是一种适用于小型移动机器人的单目视觉SLAM算法;DTAM是一种使用深度图像的SLAM算法。
- 基于组合传感器的SLAM算法:如Rovio、OKVIS、LSD-SLAM2、VINS-Mono、VINS-Fusion等。这些算法使用多种传感器(如摄像头、IMU、激光雷达等)来进行SLAM,利用多种传感器的优势来提高SLAM的精度和鲁棒性。
动机器人的单目视觉SLAM算法;DTAM是一种使用深度图像的SLAM算法。
- 基于组合传感器的SLAM算法:如Rovio、OKVIS、LSD-SLAM2、VINS-Mono、VINS-Fusion等。这些算法使用多种传感器(如摄像头、IMU、激光雷达等)来进行SLAM,利用多种传感器的优势来提高SLAM的精度和鲁棒性。















 2021
2021

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









