







第1章 绪论
1.0 引言

汽车无人驾驶技术主要分为以下部分

1.1发展历程
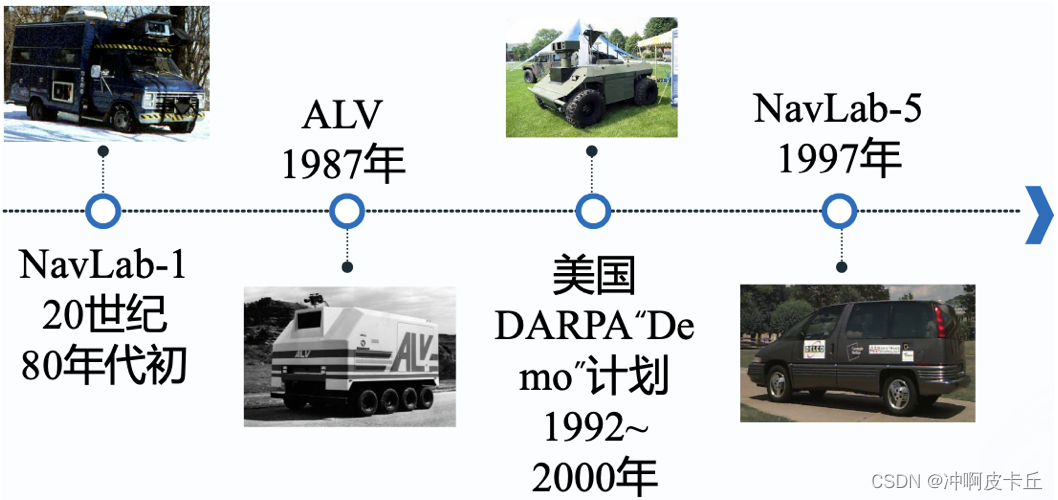
20世纪80年代初美国卡耐基梅隆大学NavLab-1:在典型结构化道路下,运行速度为28公里每小时的一种无人驾驶车辆。
1987年美国国防高级研究计划局DARPAG
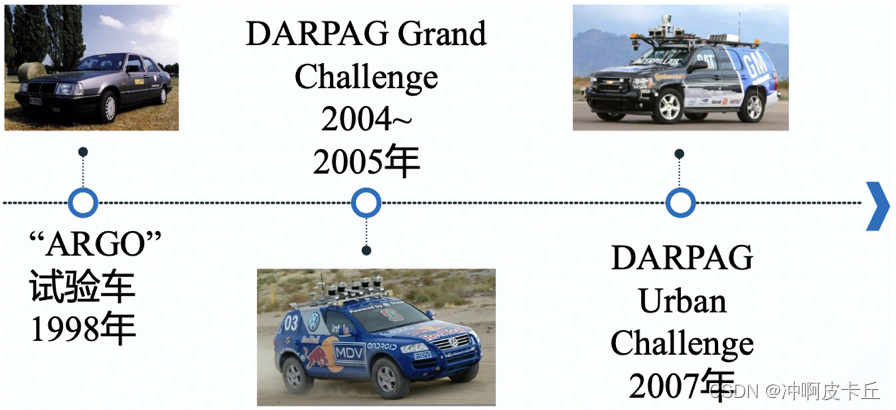
1998年意大利帕尔玛大学研发ARGO试验车,沿着意大利的高速公路进行2000公里的道路试验。
2004年DARPA举办了越野环境下的大挑战赛grand challenge,没有一辆车完成比赛,但是该届赛事仍具有里程碑的重要意义。
2007年DARPA举办了城市挑战赛,冠军是卡耐基梅隆大学的Boss无人车。


SAE美国汽车驾驶协会:将自动驾驶分为驾驶辅助、部分自动驾驶、有条件自动驾驶、高度自动驾驶以及完全自动驾驶5个级别,
国内无人驾驶的发展情况




国内外地面无人驾驶车辆发展历程
百花齐放,百家争鸣
整车及零部件生产厂商,互联网企业,创业公司,科研院所
1.2 体系结构

无人驾驶汽车分级
L0.无自动驾驶 Level 0 Driver only
L1.辅助驾驶 Level 1 Assisted
L2.部分自动驾驶 Level 2 Partial Automation
L3.限制条件下的自动驾驶 Level 3 Conditional automation
L4.高度自动驾驶 Level 4 High automation
L5.全工况自动驾驶 Level 5 Full automation

无人驾驶与智能交通系统

车联网通常是指车与车(V2V),车与路面基础设施(V2I),车与人(V2P),车与传感设备的交互,实现车辆与公众网络通信的动态移动通信系统

无人驾驶汽车的应用场景
无人驾驶车辆在矿区、园区等区域的应用
无人驾驶车辆在国家安全领域也有广泛应用



第2章 车辆底盘无人化改造
2.0 概述
第3章 无人车电子电气架构以及硬件
3.0 电子电气架构








环境感知常用传感器、定位导航常用传感器、车载通信系统、车载计算平台、车载供电系统
激光雷达、毫米波雷达、车载相机
3.1 环境感知常用传感器

激光雷达简介








毫米波雷达
激光雷达的缺点
烟雾、扬尘对激光雷达的影响


车载相机简介
车载相机
单目相机 双目相机(深度相机) 环视相机

相机成像原理
小孔成像















 5135
5135











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









