







一、硬件介绍
正点原子战舰开发板
STM32F103ZET6有5个串口,查看引脚图可以找到对应的IO口分别如下
| 串口 | USART1 | USART2 | USART3 | UART4 | UART5 | 输入/输出方式 |
|---|---|---|---|---|---|---|
| USARTx_TX | PA9 | PA2 | PB10 | PC10 | PC12 | 复用推挽输出 |
| USARTx_RX | PA10 | PA3 | PB11 | PC11 | PD2 | 浮空输入 |
USART1挂在APB2下
USART2,USART3,USART4,USART5挂在APB1下
一、实现目的
串口调试助手设置波特率设置115200,停止位1,数据为8,校验位None,以十六进制显示和发送。不勾选DTR和RTS。
按下KEY0,串口调试助手接收到十六进制下的41
以十六进制发送5a a5,开发板上的LED0/LED1均点亮
三、代码简介
3.1 公共的LED和按键等外设代码
因为涉及到LED和KEY,所以包含led.h、led.c、key.h、led.c如下
#ifndef __LED_H
#define __LED_H
#include "sys.h"
#define LED0 PBout(5)// PB5
#define LED1 PEout(5)// PE5
void LED_Init(void);//初始化
#endif
#include "led.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOE, ENABLE); //使能PB,PE端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED0-->PB.5 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.5
GPIO_SetBits(GPIOB,GPIO_Pin_5); //PB.5 输出高
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED1-->PE.5 端口配置, 推挽输出
GPIO_Init(GPIOE, &GPIO_InitStructure); //推挽输出 ,IO口速度为50MHz
GPIO_SetBits(GPIOE,GPIO_Pin_5); //PE.5 输出高
}
#ifndef __KEY_H
#define __KEY_H
#include "sys.h"
#define KEY0 GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4)//读取按键0
#define KEY1 GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_3)//读取按键1
#define KEY2 GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_2)//读取按键2
#define WK_UP GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0)//读取按键3(WK_UP)
void KEY_Init(void);//IO初始化
#endif
#include "stm32f10x.h"
#include "key.h"
#include "sys.h"
void KEY_Init(void) //IO初始化
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE,ENABLE);//使能PORTA,PORTE时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4;//KEY0-KEY2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入
GPIO_Init(GPIOE, &GPIO_InitStructure);//初始化GPIOE2,3,4
//初始化 WK_UP-->GPIOA.0 下拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0设置成输入,默认下拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.0
}
3.2 五个串口的代码配置
3.2.1 串口一:USART1
包含usart.h、usart.c
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "sys.h"
#define USART_REC_LEN 200 //定义最大接收字节数 200
extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u16 USART_RX_STA; //接收状态标记
//如果想串口中断接收,请不要注释以下宏定义
void uart_init(u32 bound);
#endif
#include "sys.h"
#include "usart.h"
/*使用microLib的方法重写printf函数*/
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void)
{
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
u8 USART_RX_BUF[USART_REC_LEN];//接收缓冲,最大USART_REC_LEN个字节.
u16 USART_RX_STA=0; //接收状态标记
void uart_init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//USART 初始化设置
USART_DeInit(USART1); //复位串口1
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
3.2.2串口二:USART2
usart.h和串口1是一样的、
usart.c需要改成串口2的配置
下面的串口3.4.5也是一样的,只需要更改usart.c即可
#include "sys.h"
#include "usart.h"
/*使用microLib的方法重写printf函数*/
int fputc(int ch, FILE *f)
{
USART_SendData(USART2, (uint8_t) ch);
while (USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void)
{
while (!(USART2->SR & USART_FLAG_RXNE));
return ((int)(USART2->DR & 0x1FF));
}
u8 USART_RX_BUF[USART_REC_LEN];//接收缓冲,最大USART_REC_LEN个字节.
u16 USART_RX_STA=0; //接收状态标记
void uart_init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO|RCC_APB2Periph_GPIOA, ENABLE); //使能USART2,GPIOA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE); //使能USART2时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PA.2
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.2
//USART1_RX GPIOA.3初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;//PA3
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.3
//USART 初始化设置
USART_DeInit(USART2); //复位串口2
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART2, &USART_InitStructure); //初始化串口2
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;//串口1中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART2, ENABLE); //使能串口2
}
void USART2_IRQHandler(void) //串口2中断服务程序
{
u8 Res;
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART2); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
3.2.3串口三:USART3
#include "sys.h"
#include "usart.h"
/*使用microLib的方法重写printf函数*/
int fputc(int ch, FILE *f)
{
USART_SendData(USART3, (uint8_t) ch);
while (USART_GetFlagStatus(USART3, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void)
{
while (!(USART3->SR & USART_FLAG_RXNE));
return ((int)(USART3->DR & 0x1FF));
}
u8 USART_RX_BUF[USART_REC_LEN];//接收缓冲,最大USART_REC_LEN个字节.
u16 USART_RX_STA=0; //接收状态标记
void uart_init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能GPIOB时钟
//RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //使能AFIO复用时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE); //使能USART3时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PB10_USART3_TX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIOB.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;//PB11_USART3_RX
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIOB.11
//USART 初始化设置
USART_DeInit(USART3); //复位串口1
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART3, &USART_InitStructure); //初始化串口1
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;//串口1中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART3, ENABLE); //使能串口1
}
void USART3_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART3); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
3.2.4 串口四:UART4
#include "sys.h"
#include "usart.h"
/*使用microLib的方法重写printf函数*/
int fputc(int ch, FILE *f)
{
USART_SendData(UART4, (uint8_t) ch);
while (USART_GetFlagStatus(UART4, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void)
{
while (!(UART4->SR & USART_FLAG_RXNE));
return ((int)(UART4->DR & 0x1FF));
}
u8 USART_RX_BUF[USART_REC_LEN];//接收缓冲,最大USART_REC_LEN个字节.
u16 USART_RX_STA=0; //接收状态标记
void uart_init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE); //使能GPIOC时钟
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //使能AFIO复用时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART4, ENABLE); //使能UART4时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PC10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOC, &GPIO_InitStructure);//初始化GPIOC10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;//PC11
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOC, &GPIO_InitStructure);//初始化GPIOC11
//USART 初始化设置
USART_DeInit(UART4); //复位串口4
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(UART4, &USART_InitStructure); //初始化串口1
//Uart4 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = UART4_IRQn;//串口4中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
USART_ITConfig(UART4, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(UART4, ENABLE); //使能串口4
}
void UART4_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
if(USART_GetITStatus(UART4, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(UART4); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
3.2.5 串口五:UART5
#include "sys.h"
#include "usart.h"
/*使用microLib的方法重写printf函数*/
int fputc(int ch, FILE *f)
{
USART_SendData(UART5, (uint8_t) ch);
while (USART_GetFlagStatus(UART5, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void)
{
while (!(UART5->SR & USART_FLAG_RXNE));
return ((int)(UART5->DR & 0x1FF));
}
u8 USART_RX_BUF[USART_REC_LEN];//接收缓冲,最大USART_REC_LEN个字节.
u16 USART_RX_STA=0; //接收状态标记
void uart_init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOD, ENABLE); //使能GPIOC/GPIOD时钟
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //使能AFIO复用时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART5, ENABLE); //使能UART5时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //PC12
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//传输速度50MHZ
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOC, &GPIO_InitStructure);//初始化GPIOC10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;//PD2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOD, &GPIO_InitStructure);//初始化GPIOC11
//USART 初始化设置
USART_DeInit(UART5); //复位串口5
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(UART5, &USART_InitStructure); //初始化串口5
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = UART5_IRQn;//串口5中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
USART_ITConfig(UART5, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(UART5, ENABLE); //使能串口5
}
void UART5_IRQHandler(void) //串口5中断服务程序
{
u8 Res;
if(USART_GetITStatus(UART5, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(UART5); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
四、实验现象
还需要增加main.c主函数
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
int main(void)
{
u16 len;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
KEY_Init();
while(1)
{
if(USART_RX_STA&0x8000)
{
len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度
if((USART_RX_BUF[0]==0x5a)&&(USART_RX_BUF[len-1]==0xa5))
{
LED0=0;
LED1=0;
}
USART_RX_STA=0;
}
if(KEY0==0)
{
delay_ms(10);//消抖
if(KEY0==0)
{ //按键按下
printf("A");
}
}
delay_ms(2000);
}
}
1.开机两个LED都是熄灭状态,按照图一配置串口调试助手,发送数据后,可以看到开发板上两个led均点亮
2.按下图三圈起来的KEY0,可以看到串口调试助手收到16进制的41
 图1 图1
|
 图2 图2
|
 图3 图3
|
 图4 图4
|
五、注意事项
1、重写printf函数,需要keil里面将Use MircroLIB勾选上。

2、注意串口1-5的命名差异,前三个都是USART、后两个是UART
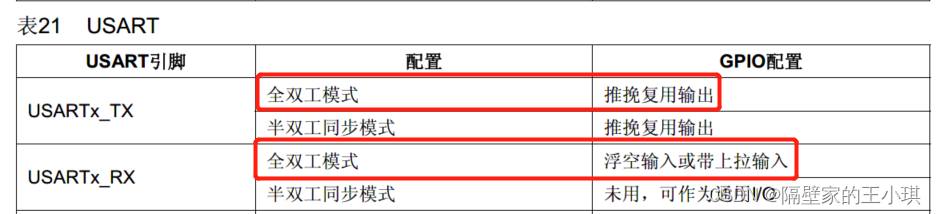
3、USART_TX配置为复用推挽输出、USART_RX设置为浮空输入
4、关于时钟的配置,
USART2 USART3 UART4 UART5挂在APB1下
AFIO、GPIOA-GPIOF、USART1挂在APB2下
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能GPIOB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE); //使能GPIOC时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD, ENABLE); //使能GPIOD时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //使能AFIO复用时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //使能USART1时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE); //使能USART2时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE); //使能USART3时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART4, ENABLE); //使能UART4时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART5, ENABLE); //使能UART5时钟
5、关于RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE)在配置五个串口的时候,可以不加,不影响使用。加上也可以。
6、串口中断服务函数的命名不能写错
void USART1_IRQHandler(void) //串口1中断服务程序
void USART2_IRQHandler(void) //串口2中断服务程序
void USART3_IRQHandler(void) //串口3中断服务程序
void UART4_IRQHandler(void) //串口4中断服务程序
void UART5_IRQHandler(void) //串口5中断服务程序
7.usart.c里面需要修改的串口位置如下图
















 5169
5169











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









