






背景简介
graspnet是一个年发布的机械臂二指夹爪夹持模型,因为最近做机器人仿真项目,因此选择这个部署一下,但是期间遇到很多问题。这些问题主要源自于我的显卡太新了——4070ti super,这导致这个古老的模型与新版本的pytorch和cuda有很大冲突,因此我写下这个文章记录一下遇到的问题。
这是我对内部代码进行修改后的连接:
环境配置
python38+cu116+torch1.12
我使用这个配置是可以运行的,按理来说,torch不超过2都应该可以
问题解析
1. 当你编译knn时可能遇到一个问题:
无法解析的外部符号 “public: long __cdecl at::Tensor::item<long>(void)const “ ($item@J@Tensor@at@@QEBAJXZ)那么只需要把knn里面所有的long改成int就行
2. 当你编译knn时可能遇到一个问题:
巴拉巴拉……bin\\HostX86\\x64\\link.exe' failed with exit code 1104这个问题特别让人迷惑,最后竟然是因为我的文件路径太长了,导致链接失败。如果你的路径长度超过260字节就可能有这个问题
3. 编译pointnet或者knn时候,要记得把cuda的环境变量配置好
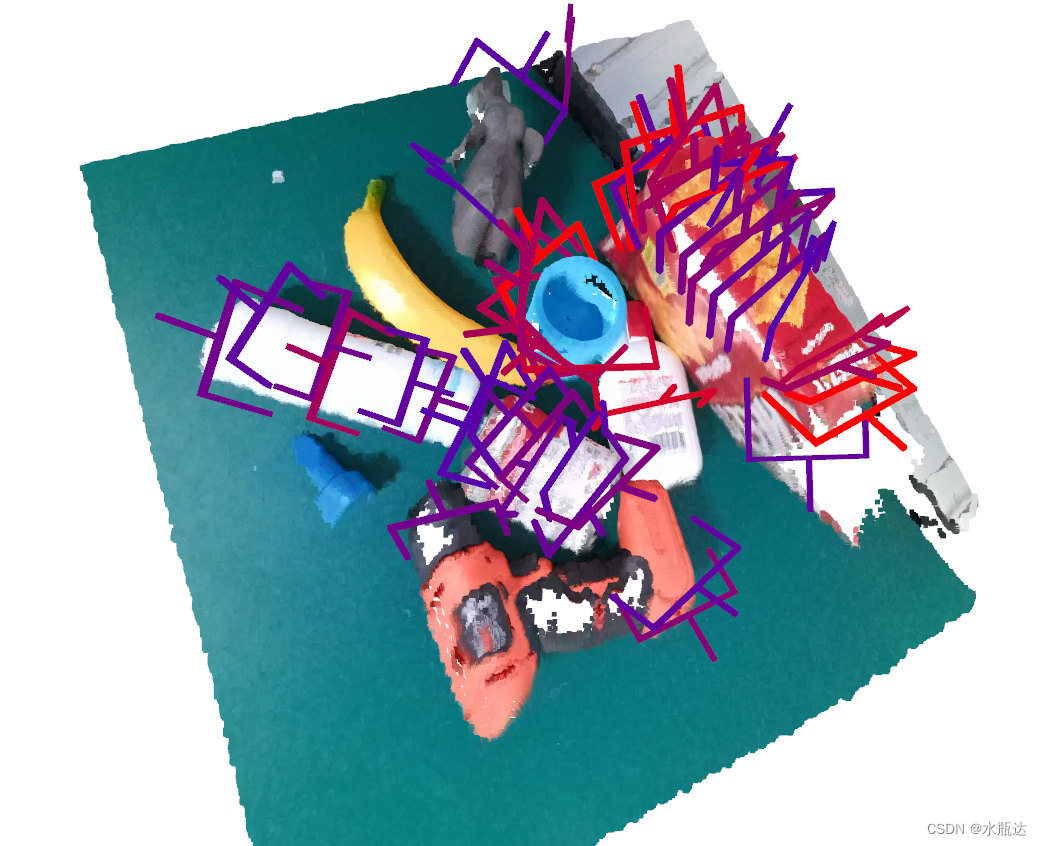
展示一下效果,为了能跑出这个效果搞了两三天。。。















 915
915

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









