










Ubuntu20.04中GraspNet复现流程
🚀非常重要的环境配置🚀
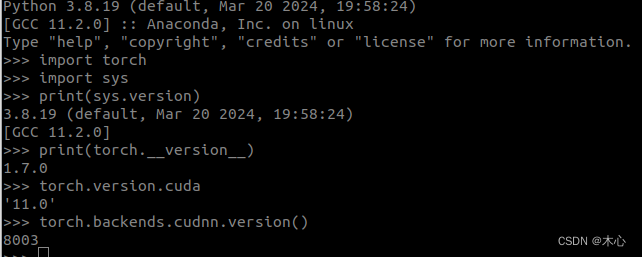
- ubuntu 20.04
- cuda 11.0.1
- cudnn v8.9.7
- python 3.8.19
- pytorch 1.7.0
- numpy 1.23.5
详细的信息如下:
笔者在复现的过程中遇到了许多的坑,现在记录一下,来帮助希望也能够复现的同学。
1.安装cuda和cudnn
具体可以参考这篇:ubuntu配置多版本cuda+cudnn环境,及版本切换方法
2.安装pytorch
具体可以参考这篇:【Linux】Ubuntu20.04版本配置pytorch环境2023.09.05【教程】
3.编译graspnetAPI
直接参考官方给的流程就好,参考这里:graspnet-baseline
然后下载官方给的预训练权重,运行demo
如果出现问题:
ImportError: numpy.core.multiarray failed to import ( auto-generated, because you didn’t call ‘numpy.import _array()’ after cimporting numpy; use ‘numpy.import array’ to disable if you are certain you don’t need it)
或者其他numpy相关的问题,我们可以把numpy的版本换成numpy==1.23.5,而不是默认的numpy==1.20.3
直接在你的虚拟环境中
pip install numpy==1.23.5
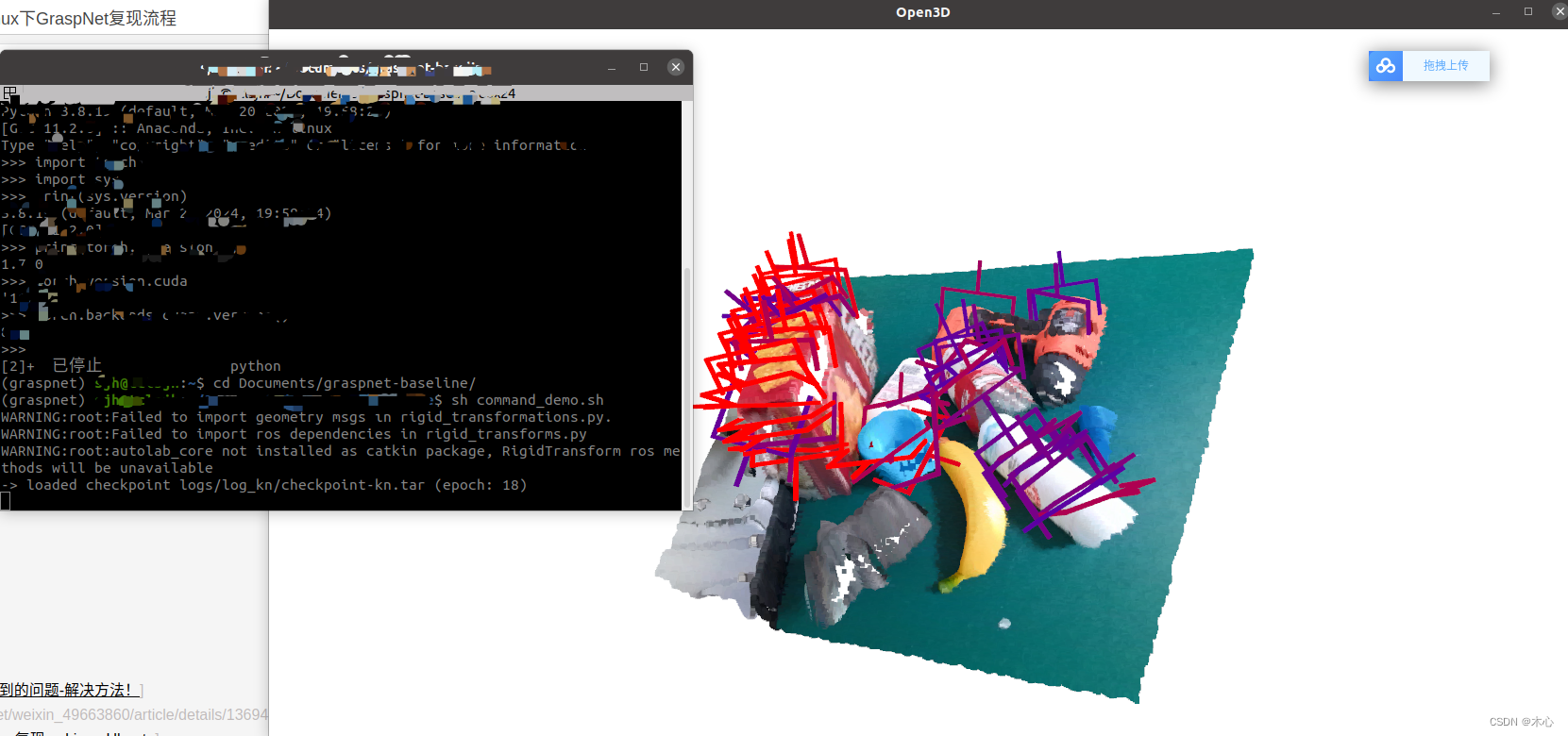
即可完成替换,然后再运行demo
sh command_demo.sh
即可出现以下的结果:
Reference
[1]复现GraspNet遇到的问题-解决方法!
[2]GraspNet-baseline复现----Linux-Ubuntu



















 1945
1945

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











