






提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
废话不多说,都是血与泪
文章中部分图片参考其他博主,侵删。
一、PCL1.13.0下载与安装(和其他博主一样)
下载
GitHub下载地址:链接: link
(https://github.com/PointCloudLibrary/pcl/releases/tag/pcl-1.13.0-rc1)
下载下面两个文件

安装
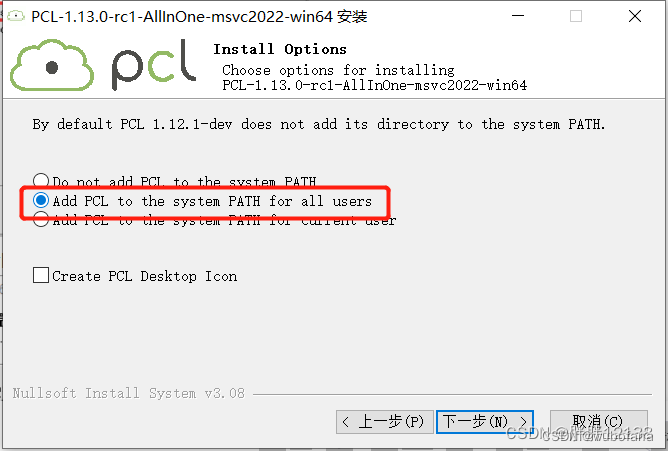
1.运行 PCL-1.13.0-rc1-AllInOne-msvc2022-win64.exe选第2个
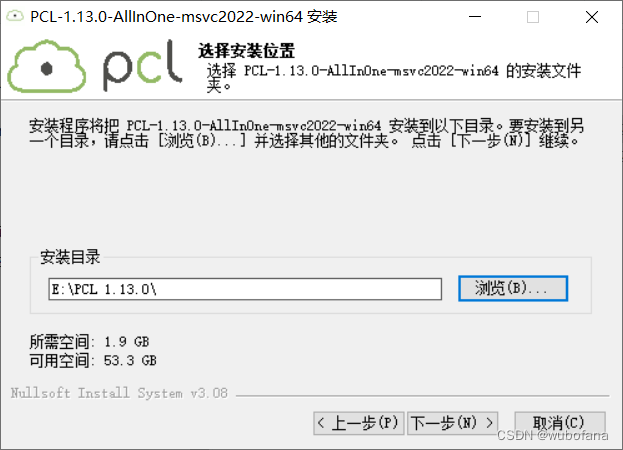
2.而后自定义安装目录(建议和我一样,这样一会就可以直接复制路径了,不一样也没关系,可以到时候自己改一下)
3.安装完成后卸载OpenNI

利用系统自带的搜索工具,搜OpenNI
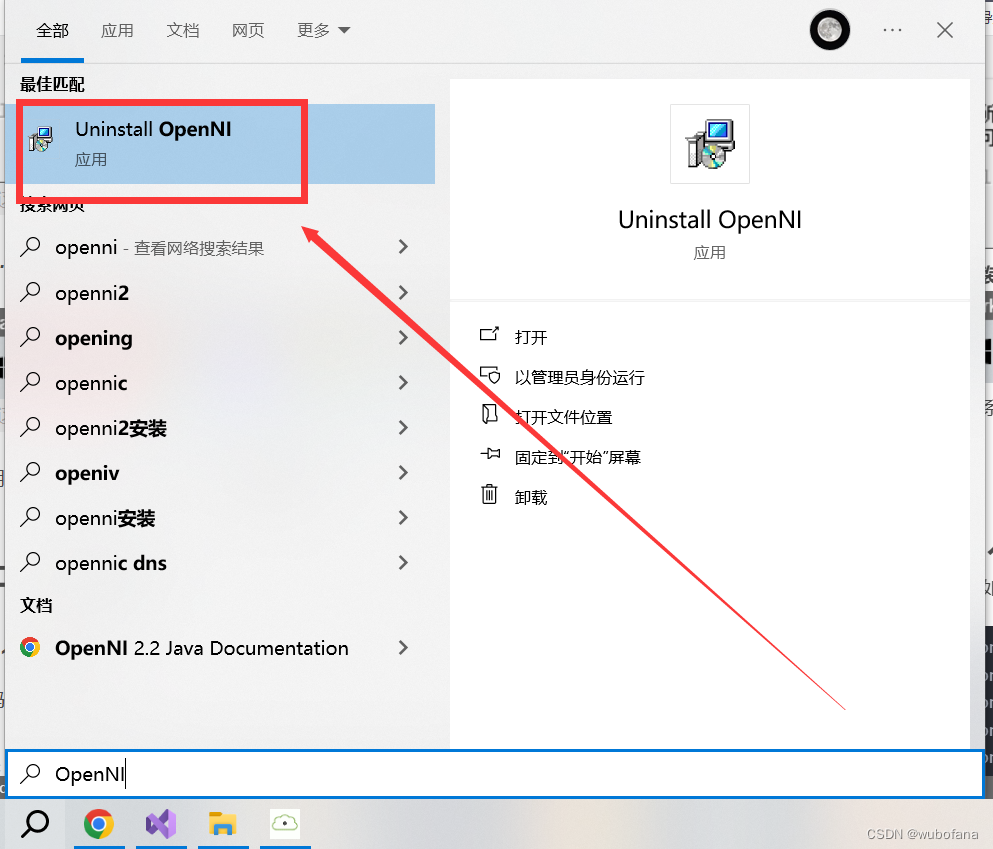
卸载掉
4.卸载完成后,进入刚刚的安装目录下的\3rdParty\OpenNI2文件夹内
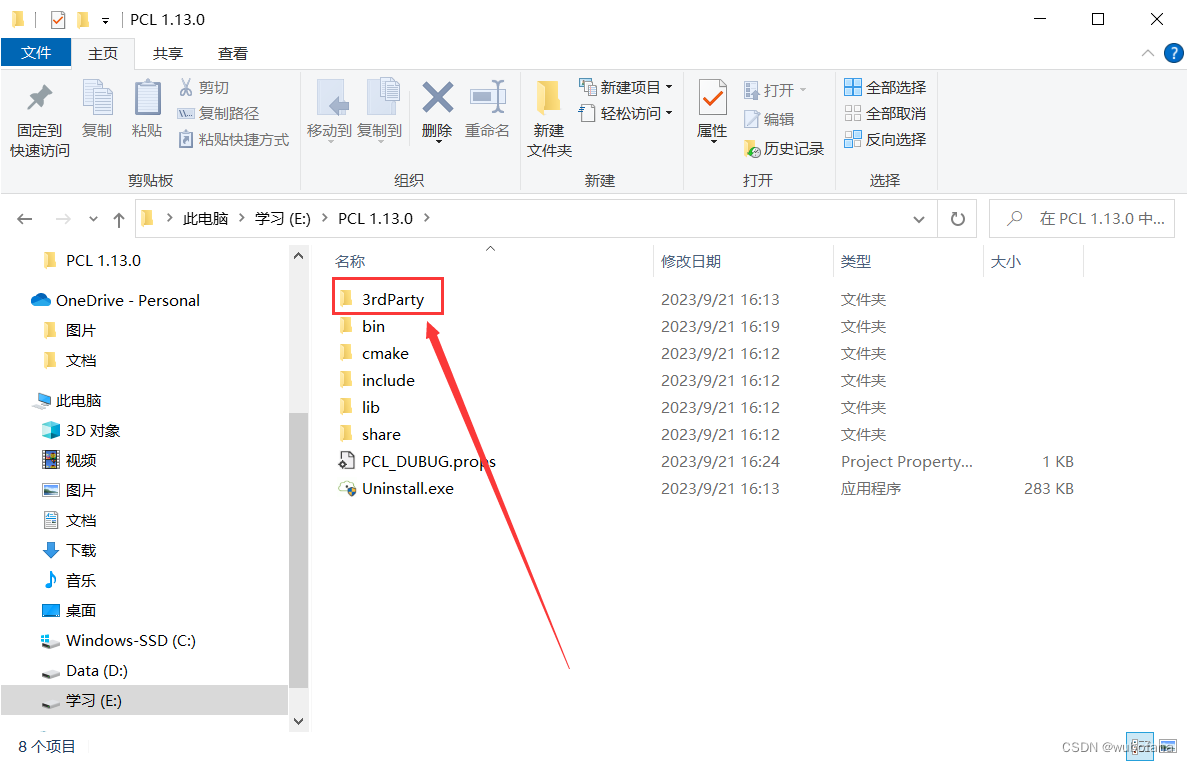
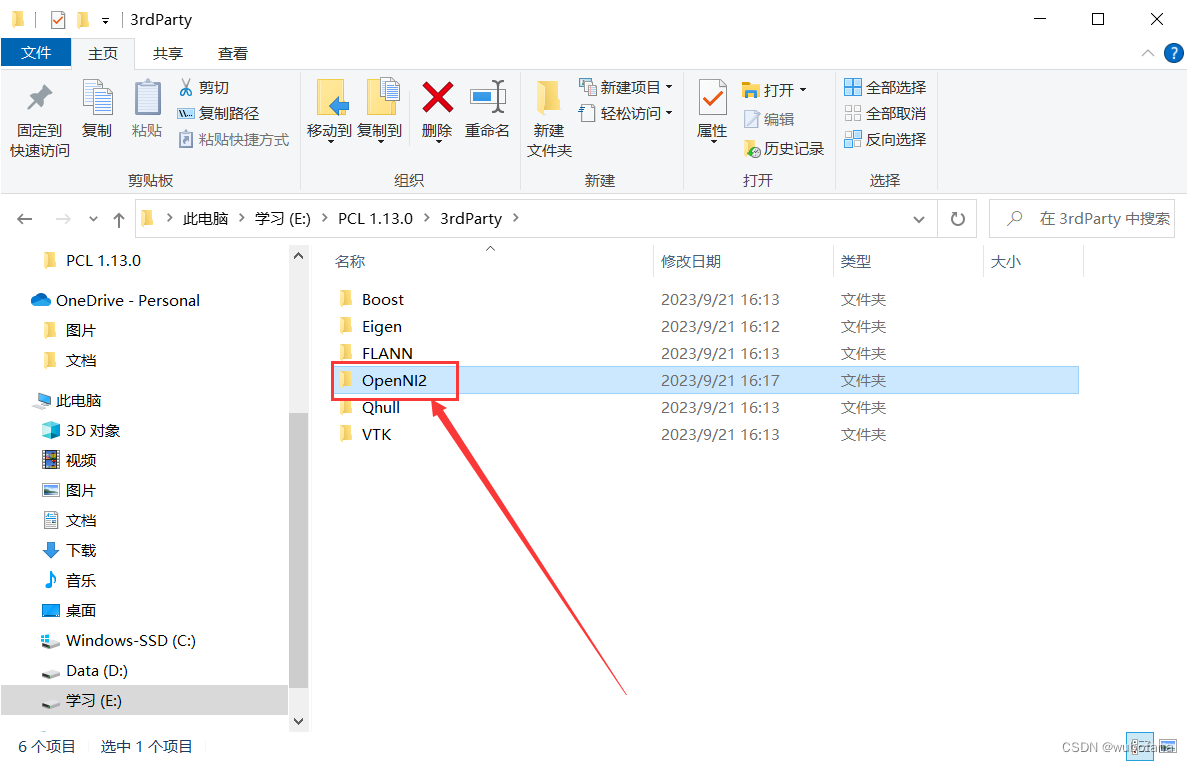 运行安装
运行安装

自定义安装路径为上面的路径(参考我的E:\PCL 1.13.0\3rdParty\OpenNI2)
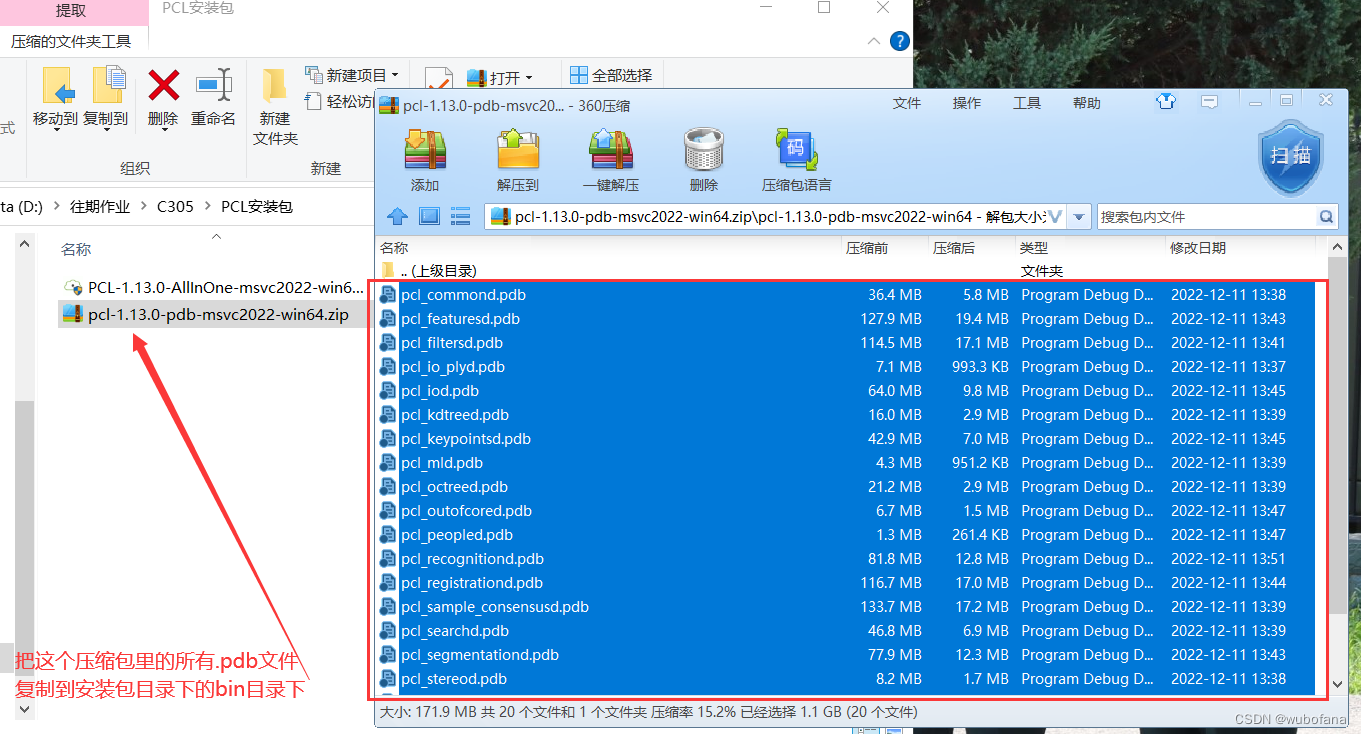
5.解压pdb包到安装目录的bin目录下(E:\PCL 1.13.0\bin\)
二、环境变量配置
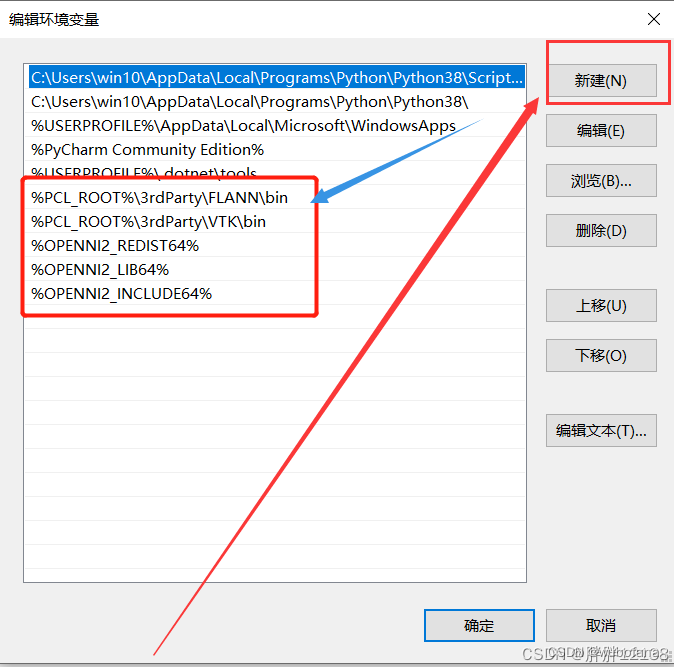
设置环境变量:右击此电脑→属性→高级系统设置→环境变量→用户变量→Path→编辑
%PCL_ROOT%\3rdParty\FLANN\bin
%PCL_ROOT%\3rdParty\VTK\bin
%OPENNI2_REDIST64%
%OPENNI2_LIB64%
%OPENNI2_INCLUDE64%

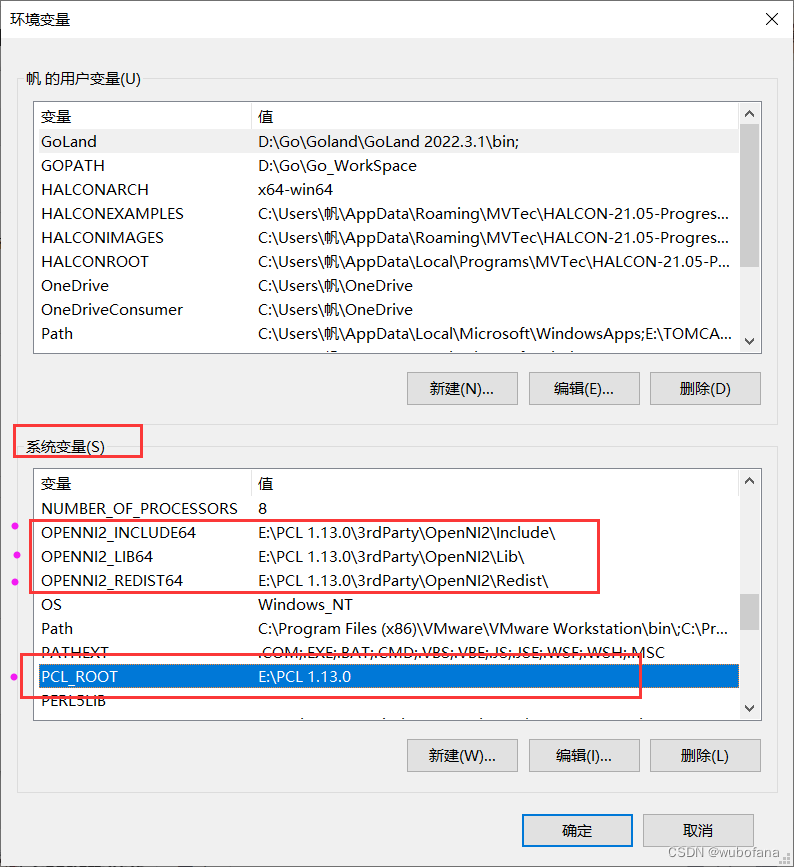
而后检查一下 !!系统变量!! 的 这4个路径是否正确
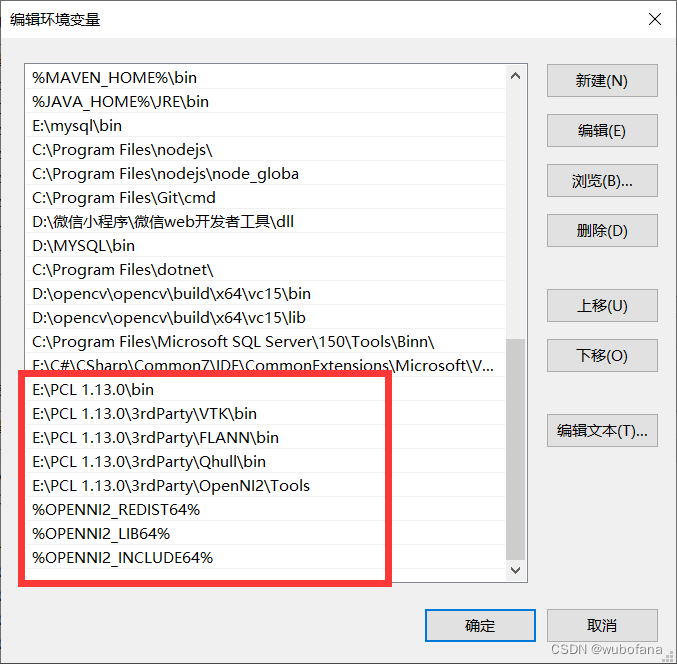
而后选择 Path→编辑,增加下面的变量(以自己真实路径为准)
E:\PCL 1.13.0\bin
E:\PCL 1.13.0\3rdParty\VTK\bin
E:\PCL 1.13.0\3rdParty\FLANN\bin
E:\PCL 1.13.0\3rdParty\Qhull\bin
E:\PCL 1.13.0\3rdParty\OpenNI2\Tools
%OPENNI2_REDIST64%
%OPENNI2_LIB64%
%OPENNI2_INCLUDE64%
然后把每个 “确定” 读点完
三、VS配置(不要上来就用属性管理器)
一劳永逸是真,但报错报到喘不上来气真难受
不知道什么是属性管理器的可以直接跟本文来
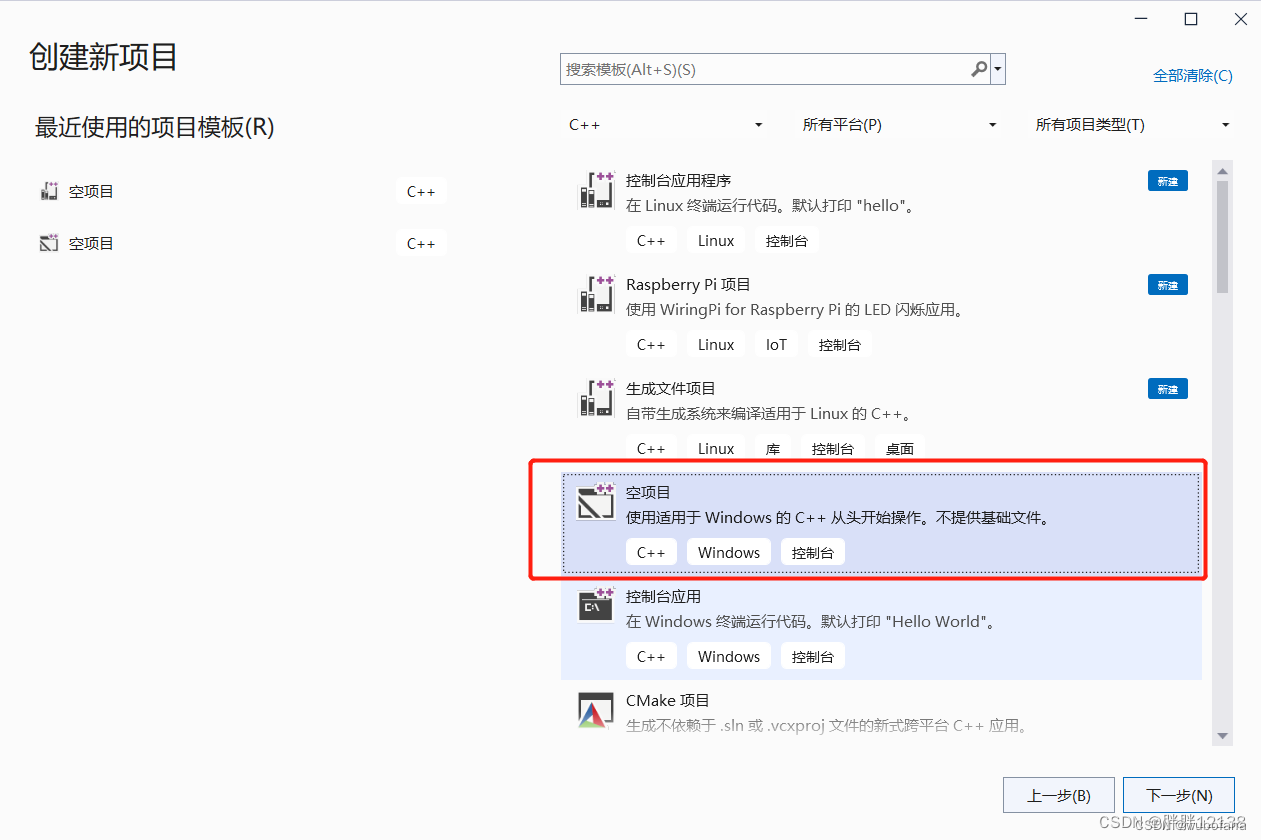
1.创建新的C++项目
这里直接借用别人的图了
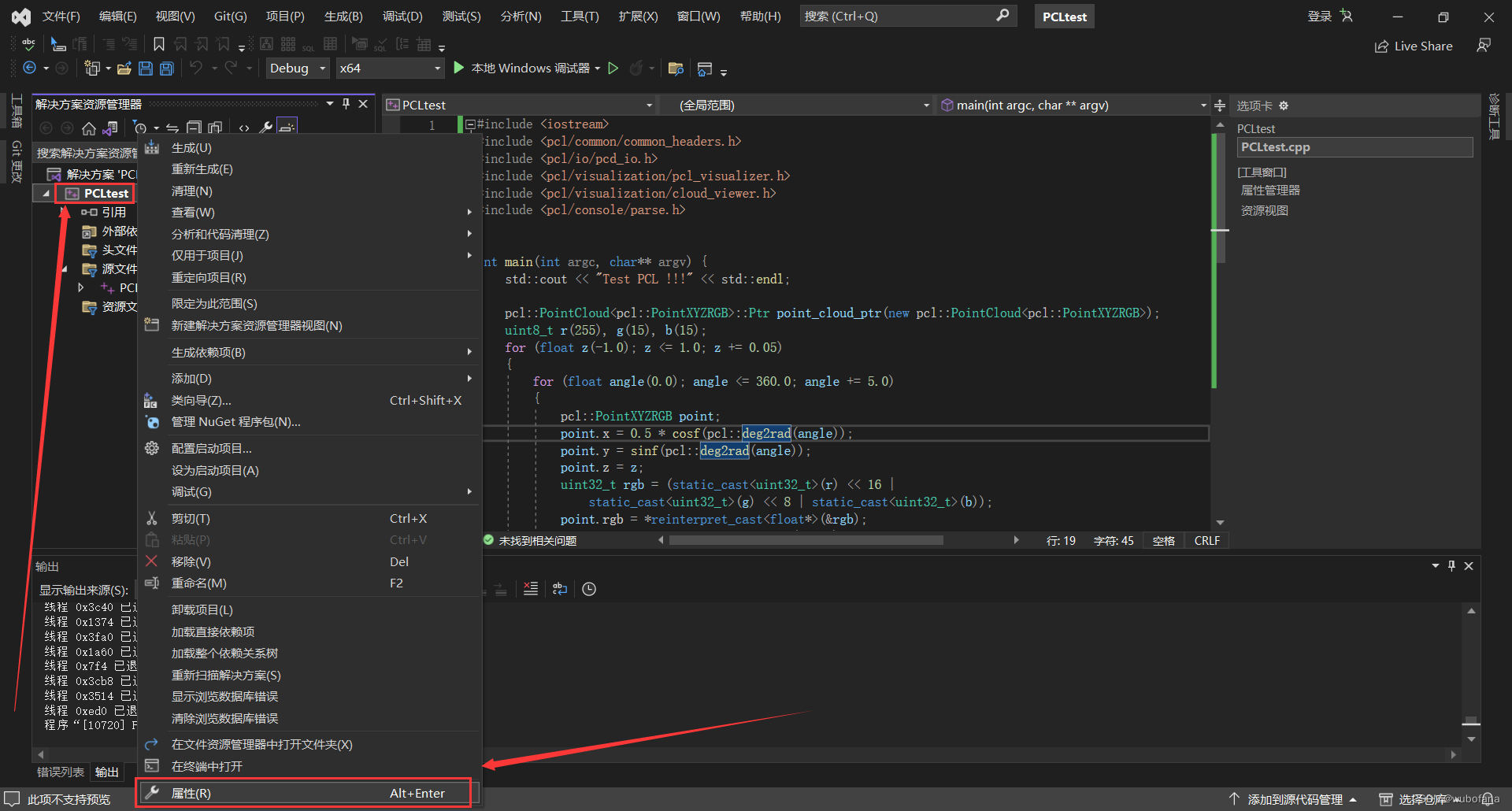
右击你的项目(不是cpp文件),然后点属性
2.开始配置
1.配置调试页面(路径可直接复制,确保系统变量正确)
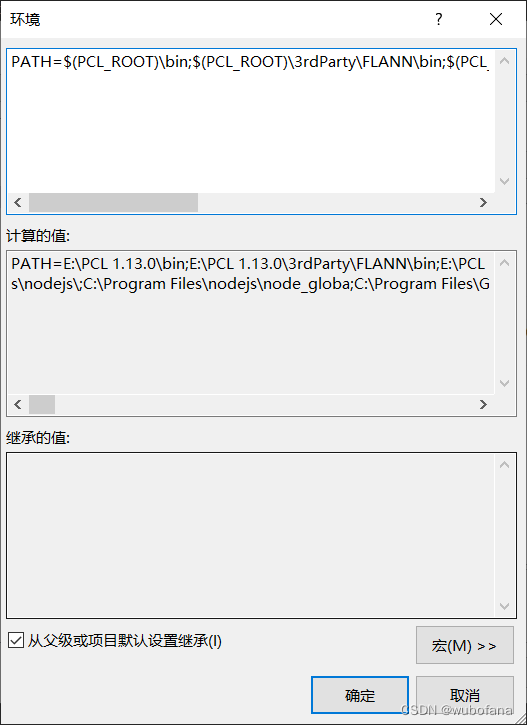
编辑 环境 的路径
PATH=$(PCL_ROOT)\bin;$(PCL_ROOT)\3rdParty\FLANN\bin;$(PCL_ROOT)\3rdParty\VTK\bin;$(PCL_ROOT)\3rdParty\Qhull\bin;$(PCL_ROOT)\3rdParty\OpenNI2\Tools;$(PATH)
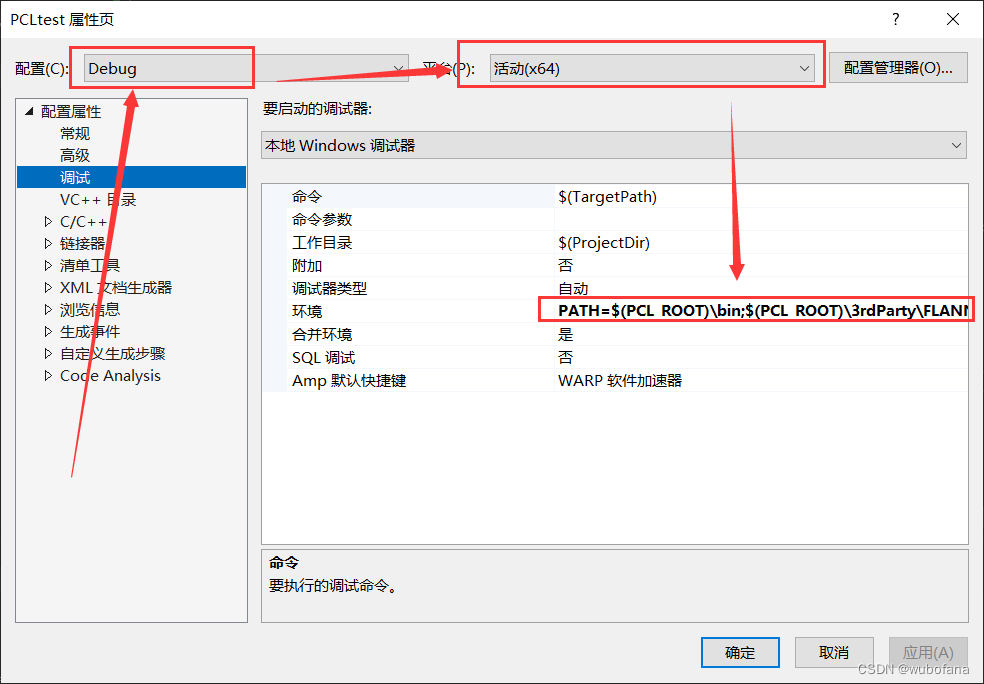
复制完是这样的
2.配置VC++ 目录
先配置包含目录,而后配置库目录
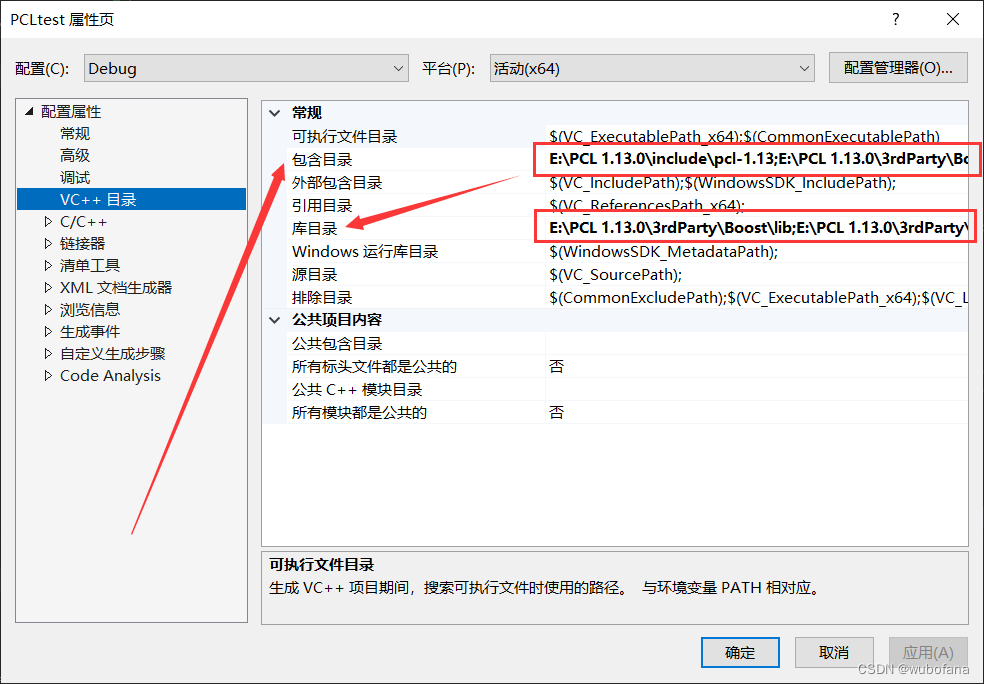
包含目录路径(以你实际为准),共7个,如图所示:
E:\PCL 1.13.0\include\pcl-1.13
E:\PCL 1.13.0\3rdParty\Boost\include\boost-1_80
E:\PCL 1.13.0\3rdParty\Eigen\eigen3
E:\PCL 1.13.0\3rdParty\FLANN\include
E:\PCL 1.13.0\3rdParty\OpenNI2\Include
E:\PCL 1.13.0\3rdParty\Qhull\include
E:\PCL 1.13.0\3rdParty\VTK\include\vtk-9.2

库目录路径(共6个),如图所示:
E:\PCL 1.13.0\3rdParty\Boost\lib
E:\PCL 1.13.0\3rdParty\FLANN\lib
E:\PCL 1.13.0\3rdParty\OpenNI2\Lib
E:\PCL 1.13.0\3rdParty\Qhull\lib
E:\PCL 1.13.0\3rdParty\VTK\lib
E:\PCL 1.13.0\lib

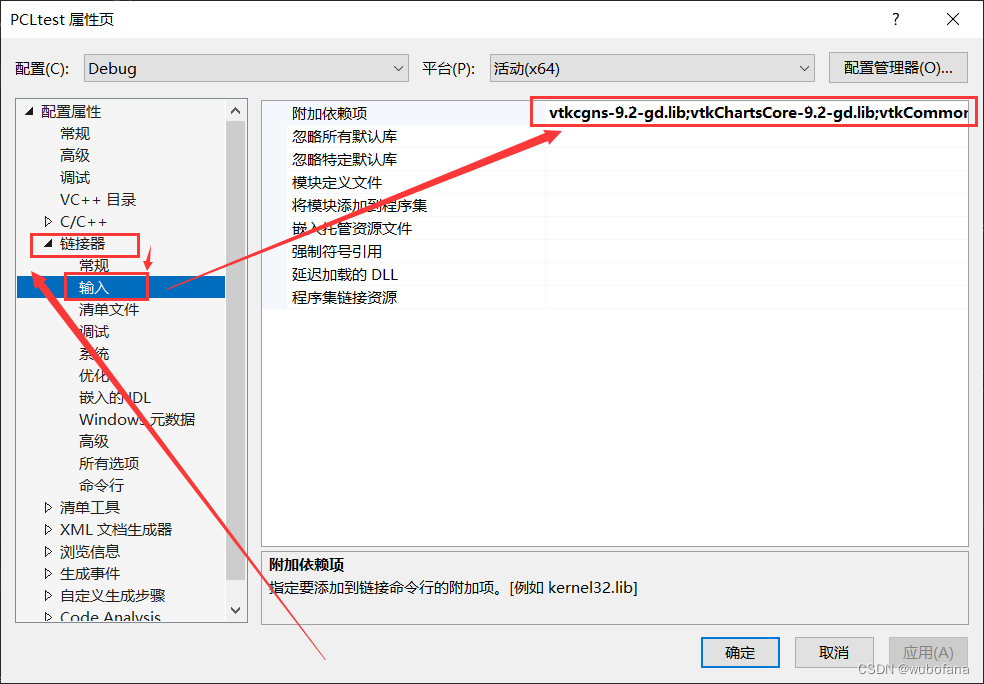
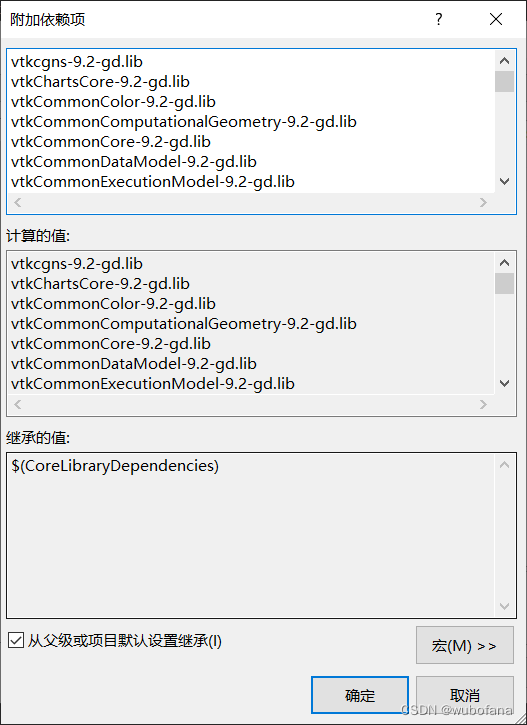
3.链接器→输入 配置
这里都是lib文件,我这里只配了Debug X64模式下的附加依赖项,直接复制即可。
如想配置别的可参考文后的参考链接采用cmd命令获取lib名的方法。
复制下面的进去:
vtkcgns-9.2-gd.lib
vtkChartsCore-9.2-gd.lib
vtkCommonColor-9.2-gd.lib
vtkCommonComputationalGeometry-9.2-gd.lib
vtkCommonCore-9.2-gd.lib
vtkCommonDataModel-9.2-gd.lib
vtkCommonExecutionModel-9.2-gd.lib
vtkCommonMath-9.2-gd.lib
vtkCommonMisc-9.2-gd.lib
vtkCommonSystem-9.2-gd.lib
vtkCommonTransforms-9.2-gd.lib
vtkDICOMParser-9.2-gd.lib
vtkDomainsChemistry-9.2-gd.lib
vtkDomainsChemistryOpenGL2-9.2-gd.lib
vtkdoubleconversion-9.2-gd.lib
vtkexodusII-9.2-gd.lib
vtkexpat-9.2-gd.lib
vtkFiltersAMR-9.2-gd.lib
vtkFiltersCore-9.2-gd.lib
vtkFiltersExtraction-9.2-gd.lib
vtkFiltersFlowPaths-9.2-gd.lib
vtkFiltersGeneral-9.2-gd.lib
vtkFiltersGeneric-9.2-gd.lib
vtkFiltersGeometry-9.2-gd.lib
vtkFiltersHybrid-9.2-gd.lib
vtkFiltersHyperTree-9.2-gd.lib
vtkFiltersImaging-9.2-gd.lib
vtkFiltersModeling-9.2-gd.lib
vtkFiltersParallel-9.2-gd.lib
vtkFiltersParallelImaging-9.2-gd.lib
vtkFiltersPoints-9.2-gd.lib
vtkFiltersProgrammable-9.2-gd.lib
vtkFiltersSelection-9.2-gd.lib
vtkFiltersSMP-9.2-gd.lib
vtkFiltersSources-9.2-gd.lib
vtkFiltersStatistics-9.2-gd.lib
vtkFiltersTexture-9.2-gd.lib
vtkFiltersTopology-9.2-gd.lib
vtkFiltersVerdict-9.2-gd.lib
vtkfmt-9.2-gd.lib
vtkfreetype-9.2-gd.lib
vtkGeovisCore-9.2-gd.lib
vtkgl2ps-9.2-gd.lib
vtkglew-9.2-gd.lib
vtkhdf5-9.2-gd.lib
vtkhdf5_hl-9.2-gd.lib
vtkImagingColor-9.2-gd.lib
vtkImagingCore-9.2-gd.lib
vtkImagingFourier-9.2-gd.lib
vtkImagingGeneral-9.2-gd.lib
vtkImagingHybrid-9.2-gd.lib
vtkImagingMath-9.2-gd.lib
vtkImagingMorphological-9.2-gd.lib
vtkImagingSources-9.2-gd.lib
vtkImagingStatistics-9.2-gd.lib
vtkImagingStencil-9.2-gd.lib
vtkInfovisCore-9.2-gd.lib
vtkInfovisLayout-9.2-gd.lib
vtkInteractionImage-9.2-gd.lib
vtkInteractionStyle-9.2-gd.lib
vtkInteractionWidgets-9.2-gd.lib
vtkIOAMR-9.2-gd.lib
vtkIOAsynchronous-9.2-gd.lib
vtkIOCesium3DTiles-9.2-gd.lib
vtkIOCGNSReader-9.2-gd.lib
vtkIOChemistry-9.2-gd.lib
vtkIOCityGML-9.2-gd.lib
vtkIOCONVERGECFD-9.2-gd.lib
vtkIOCore-9.2-gd.lib
vtkIOEnSight-9.2-gd.lib
vtkIOExodus-9.2-gd.lib
vtkIOExport-9.2-gd.lib
vtkIOExportGL2PS-9.2-gd.lib
vtkIOExportPDF-9.2-gd.lib
vtkIOGeometry-9.2-gd.lib
vtkIOHDF-9.2-gd.lib
vtkIOImage-9.2-gd.lib
vtkIOImport-9.2-gd.lib
vtkIOInfovis-9.2-gd.lib
vtkIOIOSS-9.2-gd.lib
vtkIOLegacy-9.2-gd.lib
vtkIOLSDyna-9.2-gd.lib
vtkIOMINC-9.2-gd.lib
vtkIOMotionFX-9.2-gd.lib
vtkIOMovie-9.2-gd.lib
vtkIONetCDF-9.2-gd.lib
vtkIOOggTheora-9.2-gd.lib
vtkIOParallel-9.2-gd.lib
vtkIOParallelXML-9.2-gd.lib
vtkIOPLY-9.2-gd.lib
vtkIOSegY-9.2-gd.lib
vtkIOSQL-9.2-gd.lib
vtkioss-9.2-gd.lib
vtkIOTecplotTable-9.2-gd.lib
vtkIOVeraOut-9.2-gd.lib
vtkIOVideo-9.2-gd.lib
vtkIOXML-9.2-gd.lib
vtkIOXMLParser-9.2-gd.lib
vtkjpeg-9.2-gd.lib
vtkjsoncpp-9.2-gd.lib
vtkkissfft-9.2-gd.lib
vtklibharu-9.2-gd.lib
vtklibproj-9.2-gd.lib
vtklibxml2-9.2-gd.lib
vtkloguru-9.2-gd.lib
vtklz4-9.2-gd.lib
vtklzma-9.2-gd.lib
vtkmetaio-9.2-gd.lib
vtknetcdf-9.2-gd.lib
vtkogg-9.2-gd.lib
vtkParallelCore-9.2-gd.lib
vtkParallelDIY-9.2-gd.lib
vtkpng-9.2-gd.lib
vtkpugixml-9.2-gd.lib
vtkRenderingAnnotation-9.2-gd.lib
vtkRenderingContext2D-9.2-gd.lib
vtkRenderingContextOpenGL2-9.2-gd.lib
vtkRenderingCore-9.2-gd.lib
vtkRenderingFreeType-9.2-gd.lib
vtkRenderingGL2PSOpenGL2-9.2-gd.lib
vtkRenderingHyperTreeGrid-9.2-gd.lib
vtkRenderingImage-9.2-gd.lib
vtkRenderingLabel-9.2-gd.lib
vtkRenderingLICOpenGL2-9.2-gd.lib
vtkRenderingLOD-9.2-gd.lib
vtkRenderingOpenGL2-9.2-gd.lib
vtkRenderingSceneGraph-9.2-gd.lib
vtkRenderingUI-9.2-gd.lib
vtkRenderingVolume-9.2-gd.lib
vtkRenderingVolumeOpenGL2-9.2-gd.lib
vtkRenderingVtkJS-9.2-gd.lib
vtksqlite-9.2-gd.lib
vtksys-9.2-gd.lib
vtkTestingRendering-9.2-gd.lib
vtktheora-9.2-gd.lib
vtktiff-9.2-gd.lib
vtkverdict-9.2-gd.lib
vtkViewsContext2D-9.2-gd.lib
vtkViewsCore-9.2-gd.lib
vtkViewsInfovis-9.2-gd.lib
vtkWrappingTools-9.2-gd.lib
vtkzlib-9.2-gd.lib
pcl_commond.lib
pcl_featuresd.lib
pcl_filtersd.lib
pcl_iod.lib
pcl_io_plyd.lib
pcl_kdtreed.lib
pcl_keypointsd.lib
pcl_mld.lib
pcl_octreed.lib
pcl_outofcored.lib
pcl_peopled.lib
pcl_recognitiond.lib
pcl_registrationd.lib
pcl_sample_consensusd.lib
pcl_searchd.lib
pcl_segmentationd.lib
pcl_stereod.lib
pcl_surfaced.lib
pcl_trackingd.lib
pcl_visualizationd.lib
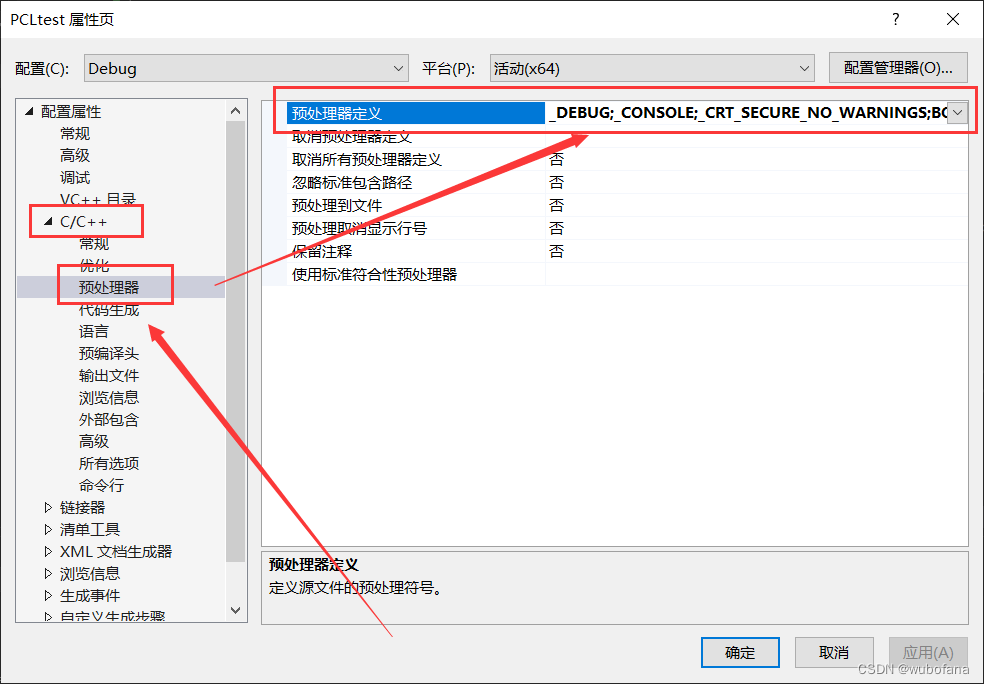
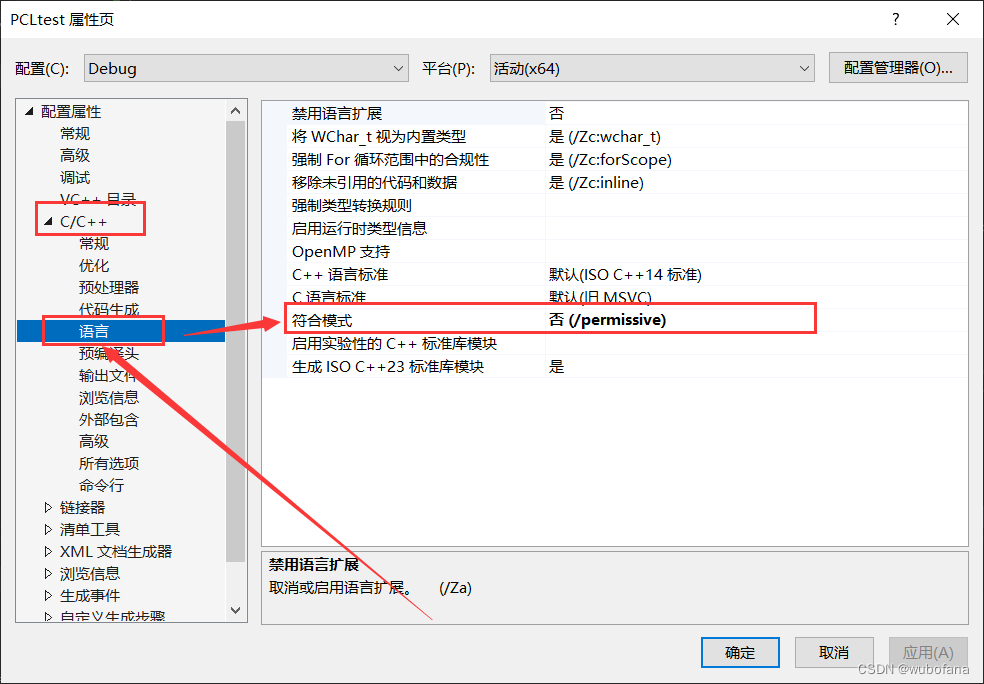
4.其它配置
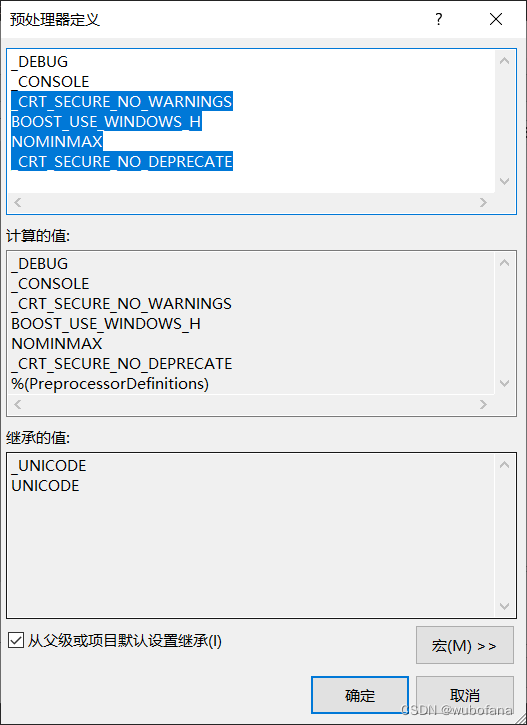
预处理器配置
添加下面的内容:
_CRT_SECURE_NO_WARNINGS
BOOST_USE_WINDOWS_H
NOMINMAX
_CRT_SECURE_NO_DEPRECATE
如图:
把“是”改为“否” 共2处
1.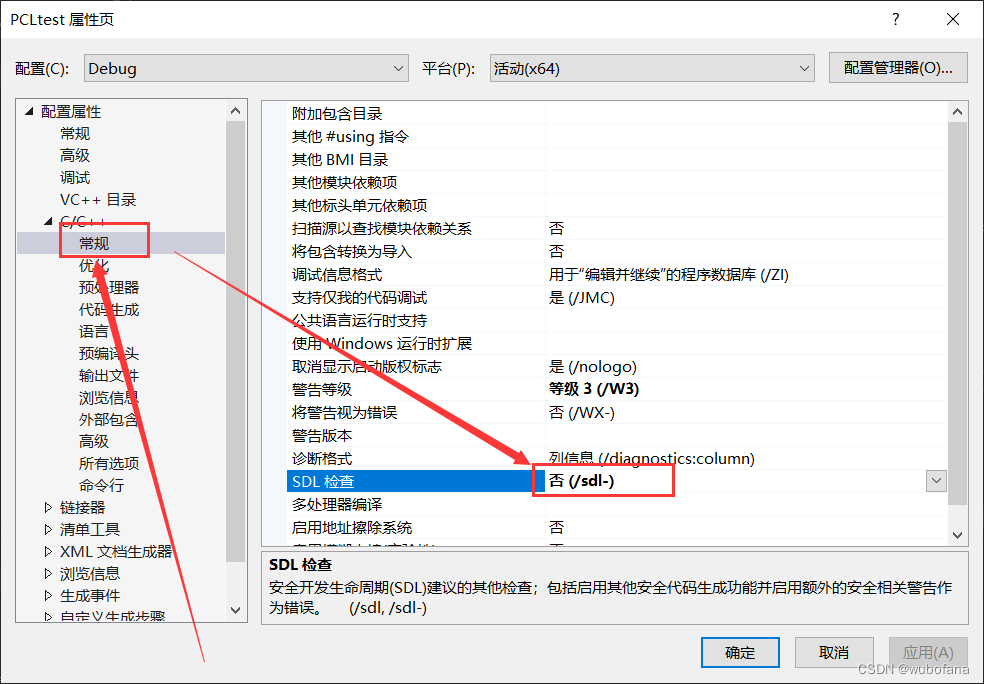
2.
测试代码
#include <iostream>
#include <pcl/common/common_headers.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/console/parse.h>
int main(int argc, char** argv) {
std::cout << "Test PCL !!!" << std::endl;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr(new pcl::PointCloud<pcl::PointXYZRGB>);
uint8_t r(255), g(15), b(15);
for (float z(-1.0); z <= 1.0; z += 0.05)
{
for (float angle(0.0); angle <= 360.0; angle += 5.0)
{
pcl::PointXYZRGB point;
point.x = 0.5 * cosf(pcl::deg2rad(angle));
point.y = sinf(pcl::deg2rad(angle));
point.z = z;
uint32_t rgb = (static_cast<uint32_t>(r) << 16 |
static_cast<uint32_t>(g) << 8 | static_cast<uint32_t>(b));
point.rgb = *reinterpret_cast<float*>(&rgb);
point_cloud_ptr->points.push_back(point);
}
if (z < 0.0)
{
r -= 12;
g += 12;
}
else
{
g -= 12;
b += 12;
}
}
point_cloud_ptr->width = (int)point_cloud_ptr->points.size();
point_cloud_ptr->height = 1;
pcl::visualization::CloudViewer viewer("test");
viewer.showCloud(point_cloud_ptr);
while (!viewer.wasStopped()) {};
return 0;
}
参考原文
https://blog.csdn.net/Scarlett2025/article/details/131084940
https://blog.csdn.net/qq_41339558/article/details/128184513
https://blog.csdn.net/m0_50910915/article/details/128651063














 5218
5218











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









