







 本文介绍了摄像头基础知识,重点关注MIPI CSI中的lane概念。通过理论计算公式,解释了如何根据Camera的有效像素、ADC色彩深度、帧率和MIPI速率来确定lane数量。例如,在MT6735平台上,对于5M像素、30fps、10位ADC的摄像头,至少需要2 lane。同时,文章提到了PHY层的C-PHY和D-PHY协议,以及不同lane模式下的硬件IO分配情况。
本文介绍了摄像头基础知识,重点关注MIPI CSI中的lane概念。通过理论计算公式,解释了如何根据Camera的有效像素、ADC色彩深度、帧率和MIPI速率来确定lane数量。例如,在MT6735平台上,对于5M像素、30fps、10位ADC的摄像头,至少需要2 lane。同时,文章提到了PHY层的C-PHY和D-PHY协议,以及不同lane模式下的硬件IO分配情况。
理论计算公式:
Camera 有效像素 * ADC色彩深度 * 帧率 * (1+20%) < lane数 * mipi速率
1、Camera 有效像素
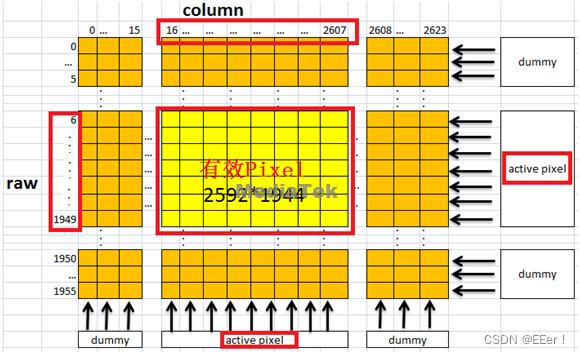
以下图为例:
总像素:2624 * 1956 = 5132544
有效像素:2592 * 1944 = 5038848
2、ADC色彩深度
色彩深度越高,可用的颜色就越多
10bit表示ADC的采集精度,在Camera中表示一个像素的采集精度为210=1024
一般Camera Sensor使用的是8或10位的RGB RAW,具体查看Camera Sensor资料
| 图像格式 | ADC色彩深度 |
|---|---|
| RAW8 | 8bit |
| RAW10 | 10bit |
| RAW16 | 16bit |
| RAW8 | 8bit |
| YUV422 | 16bit |
3、MIPI速率
举例:MT6735,5M摄像头,有效像素为2592 * 1944,30fps帧率,10位ADC色彩深度,最
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









