







目录
2.1 视觉感知要素
2.1.1 人眼的结构
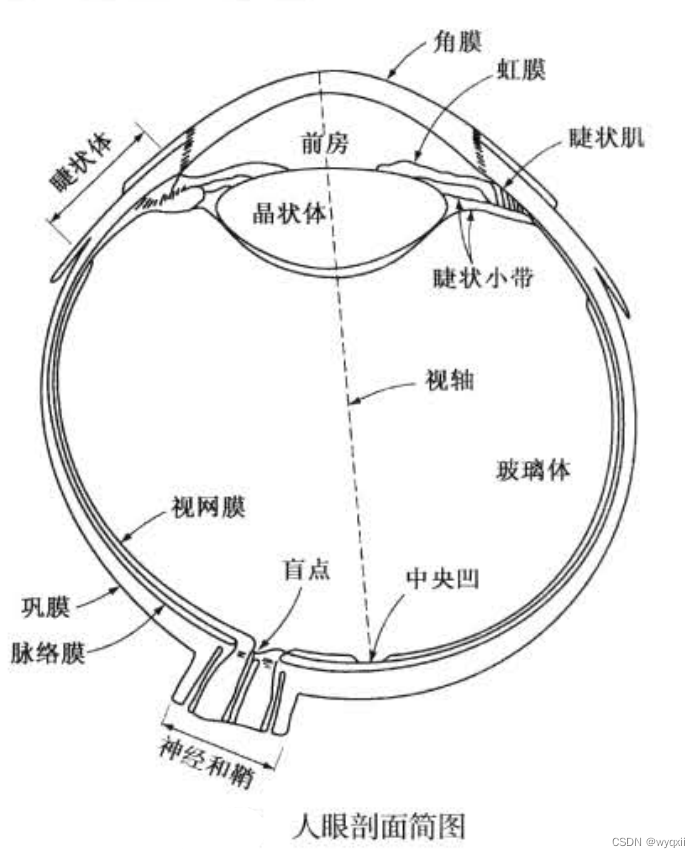
1.包围着眼睛的三层薄膜:角膜与巩膜外壳、脉络膜、视网膜。其中角膜与巩膜相连;脉络膜位于巩膜的正下方 ;脉络膜的最前面分为睫状体和虹膜。
2.脉络膜:眼睛的重要滋养源;能阻断透入巩膜进入眼内的光线,以保证成像清晰。
3.虹膜:其收缩和扩张控制着进入眼睛的光量。
4.晶状体:能调节眼睛的焦距,使眼睛能够看清不同距离的物体。
5.视网膜:当眼睛聚焦时,来自眼睛外部物体的光能在视网膜上成像。视网膜表面分布的不连续的光感受器提供了图案视觉。
6.视网膜上的两类光感受器:锥状体和杆状体。
7.锥状体:主要位于视网膜的中间部分(即中央凹),它对颜色高度敏感。人利用锥状体来充分地分辨图像细节。肌肉控制眼球转动,直到感兴趣的物体图像落到中央凹上。锥状体视觉称为白昼视觉或亮视觉。
8.中央凹:是视网膜中直径约为1.5mm的圆形凹坑。我们可以把它看作是大小为1.5mm * 1.5mm的方形传感器阵列。
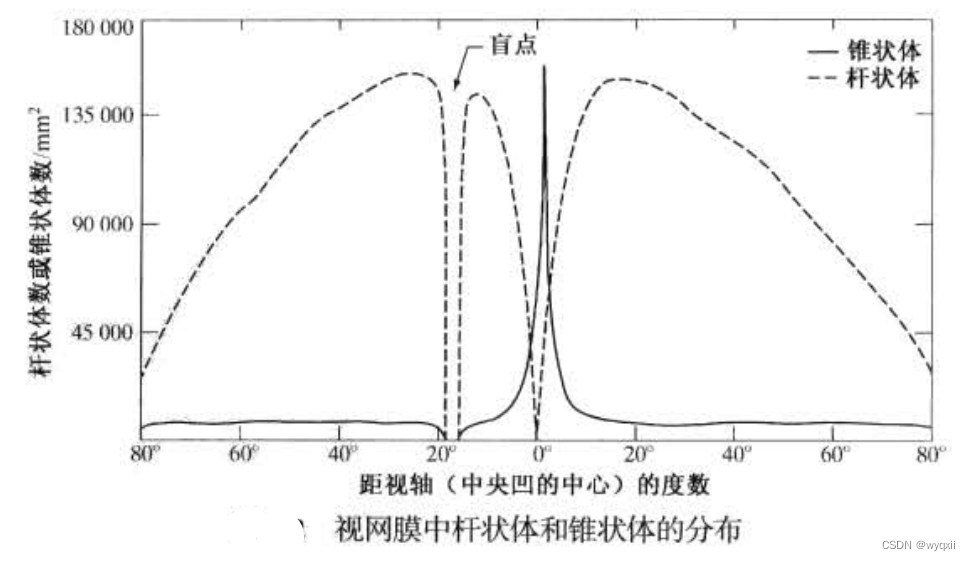
9.杆状体:分布面积较大。它用于给出视野内的总体图像。它没有彩色感觉,并且低照明度敏感。例如在白天呈现鲜明色彩的物体,在月光下都没有颜色,因为此时只有杆状体受到刺激。这种现象称为暗视觉或微光视觉。
10.盲点:在距离视轴20°左右处,有一个区域由于没有感受器而导致出现了盲点。
11.感受器的分布:除了盲点以外,感受器的分布是关于中央凹径向对称的。锥状体在视网膜的中心(也就是在中央凹的中心区域)最密。并且从中心向外到偏离视轴约20°处,杆状体的密度急剧增大,然后向外到视网膜的极限边缘处,密度逐渐下降。如下图所示:
2.1.2 眼睛中图像的形成
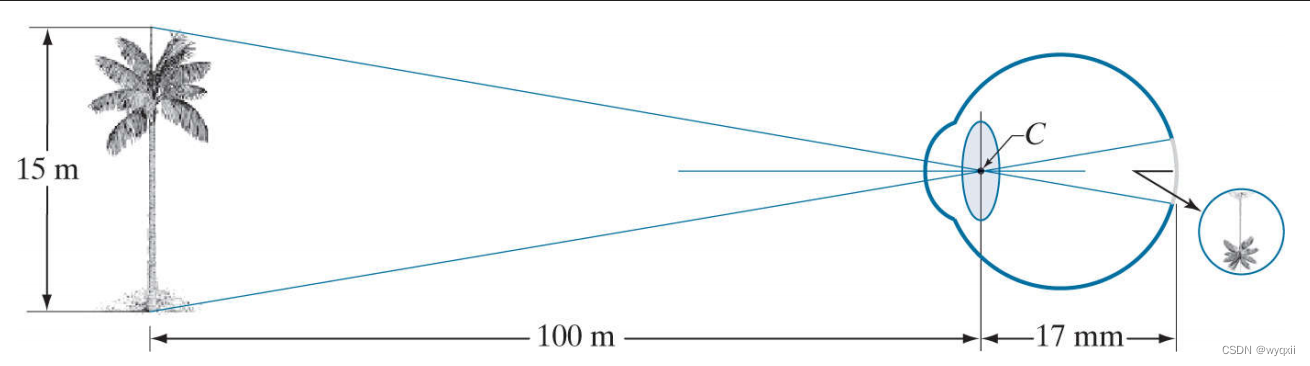
在照相机中,镜头有固定的焦距,各种距离的焦距是通过改变镜头和成像平面间的距离来实现的。在人眼中则相反,晶状体与成像区域(视网膜)之间的距离固定,各种距离的焦距是通过改变晶状体的形状来得到的。晶状体的形状改变依赖于睫状体中的纤维。
以下是人眼观察一颗树的图解:
2.1.3 亮度适应和辨别
1.亮度适应
(1)人的视觉系统能够适应的光强度级别范围十分宽。主观亮度(即由人的视觉系统感知到的亮度)是进入人眼的光强的对数函数,如下图所示:
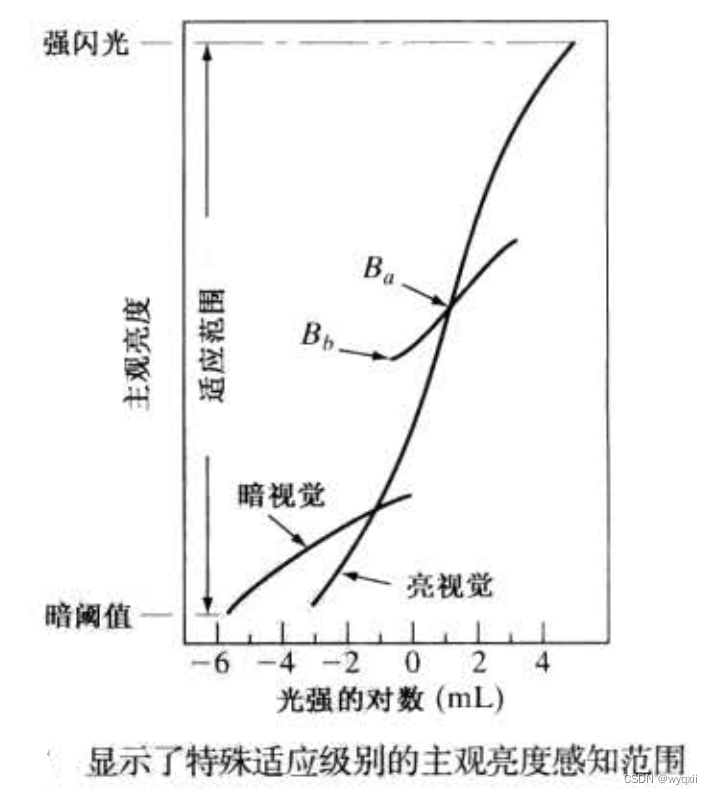
(2)亮度适应现象:由该图可以发现,眼睛可以同时辨别的亮度的总范围,对于整个适应范围相比是很小的,这就是亮度适应现象。
(3)亮度适应级别:对于给定的条件集合,视觉系统的当前灵敏度级别称为亮度适应级别。
例如,对于图中的亮度,较短的这段交叉线,表示当眼睛适应这一强度级别时,人眼所能感知到的主观亮度范围。这一范围是有一定限制的,级别
或者低于级别
的刺激都被感知为不可辨别的黑色。而曲线的上部如果延伸太远,适应能力会提高到更高的水平。
2.亮度辨别
在特定的适应级别上,我们研究人眼辨别光强变化的能力。以下是用于确定人类视觉系统亮度辨别能力的一个著名实验:
实验准备:一个观察者,一个十分大的均匀发光区(它能够占有注视对象的全部视野)
实验过程:先使用强度的可变光源照射区域,使其均匀发光;再在观察者视野中增加一个照射分量
,形成一个持续时间很短的闪烁。该闪烁在均匀光场的中央以圆形方式出现,如下图:
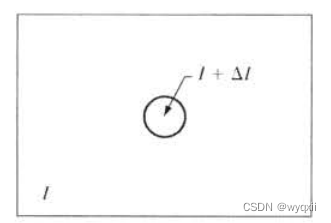
当逐渐增强到一定值时,观察者察觉到图形变化,则给出“是”的回应。分别测试在不同
的情况下,察觉到图形变化时
的值。
称为韦伯比。
值较小意味着能够辨别强度较小的亮度变化,表示亮度辨别能力较好;相反,
较大意味着只能辨别强度较大的亮度变化,表示亮度辨别能力较差。以下是亮度辨别能力和亮度变化的关系函数:
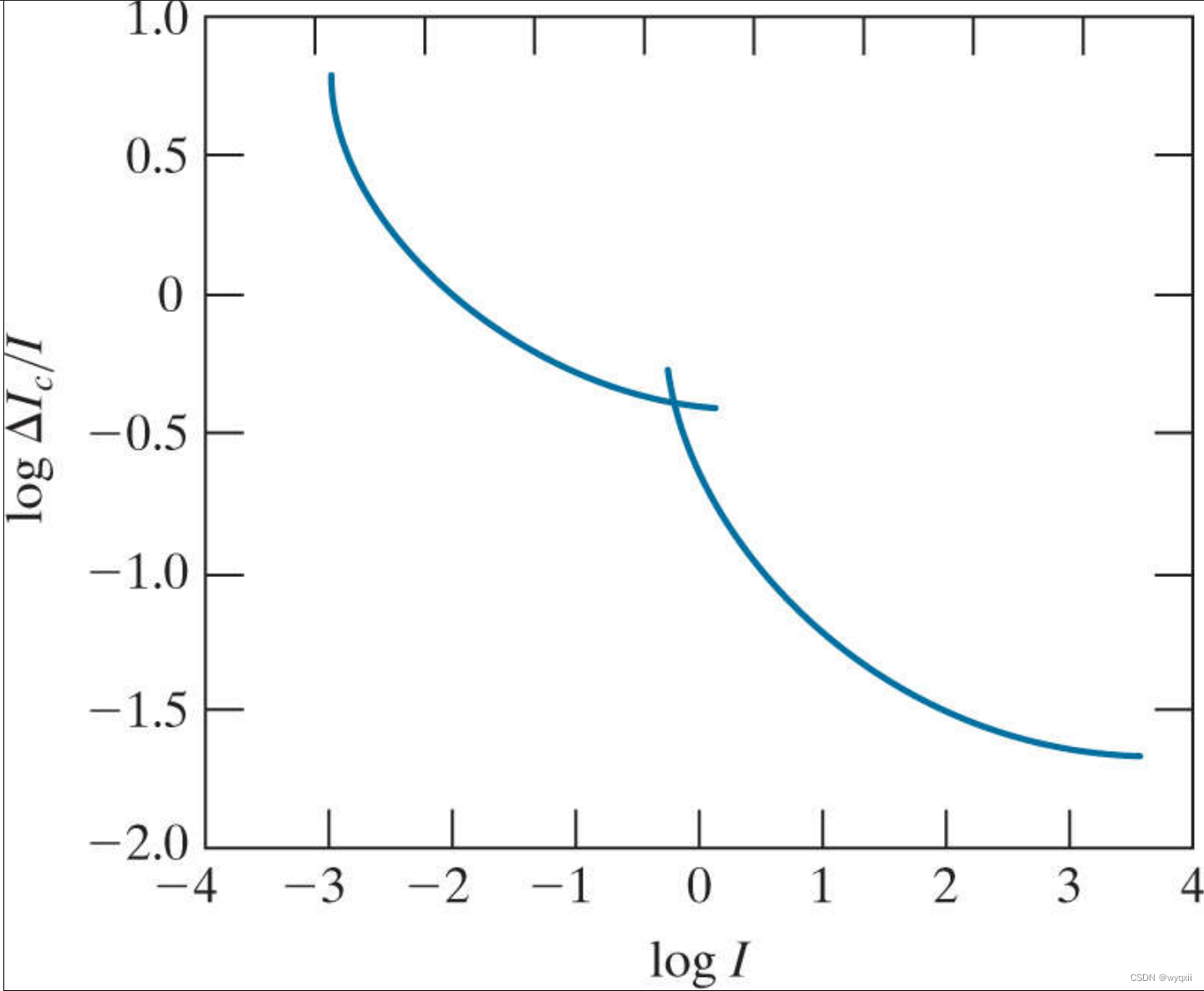
我们发现:在低照明级别,亮度辨别能力较差(韦伯比大)。且亮度辨别能力会随着背景照明的增加而明显改善(韦伯比降低)。
曲线中的两条分支反映了这样一个事实:在低照明水平情况下,视觉由杆状体执行;在高照明水平情况下,视觉由锥状体执行。
3.人类感知现象
(1)马赫带现象
感知亮度不是简单的强度相关的函数。视觉系统往往会在不同强度区域的边界出现“下冲”或者“上冲”现象。例如下图:
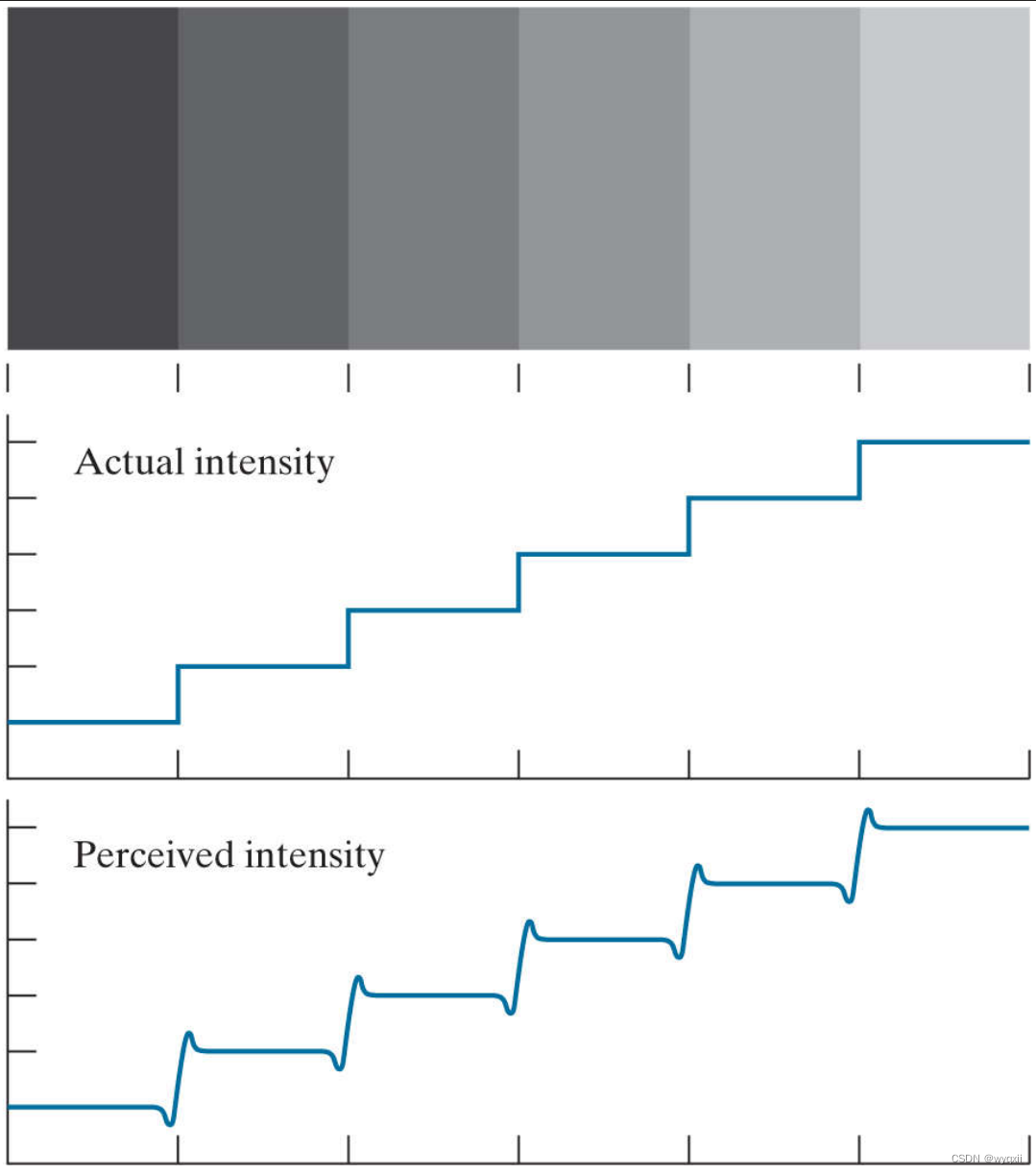
Actual intensity:实际亮度
Perceived intensity:感知亮度
我们发现,虽然每条条带的强度恒定,但是在靠近边界处,我们实际上感知到了带有毛边的亮度模式,这些看起来带有毛边的带称为马赫带。
(2)同时对比现象:
感知区域的亮度并不简单地取决于其强度。例如下图:
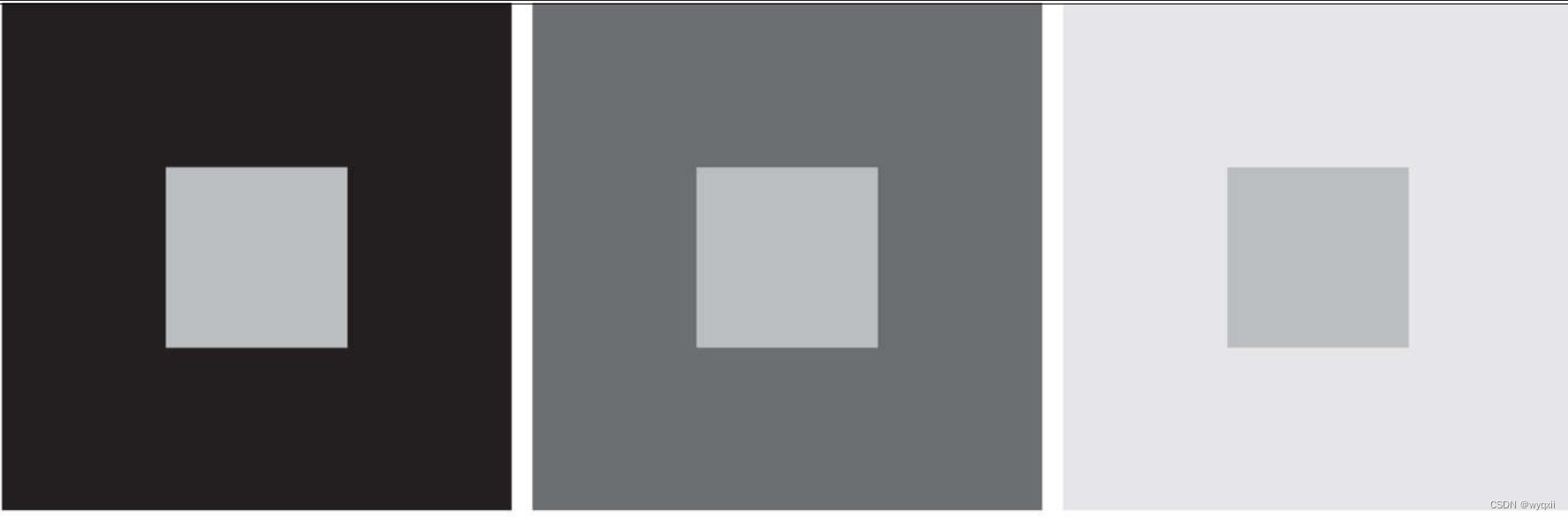
所有中心方块都有完全相同的强度。然而,随着背景变得更亮,它们会在眼睛里变得更暗。
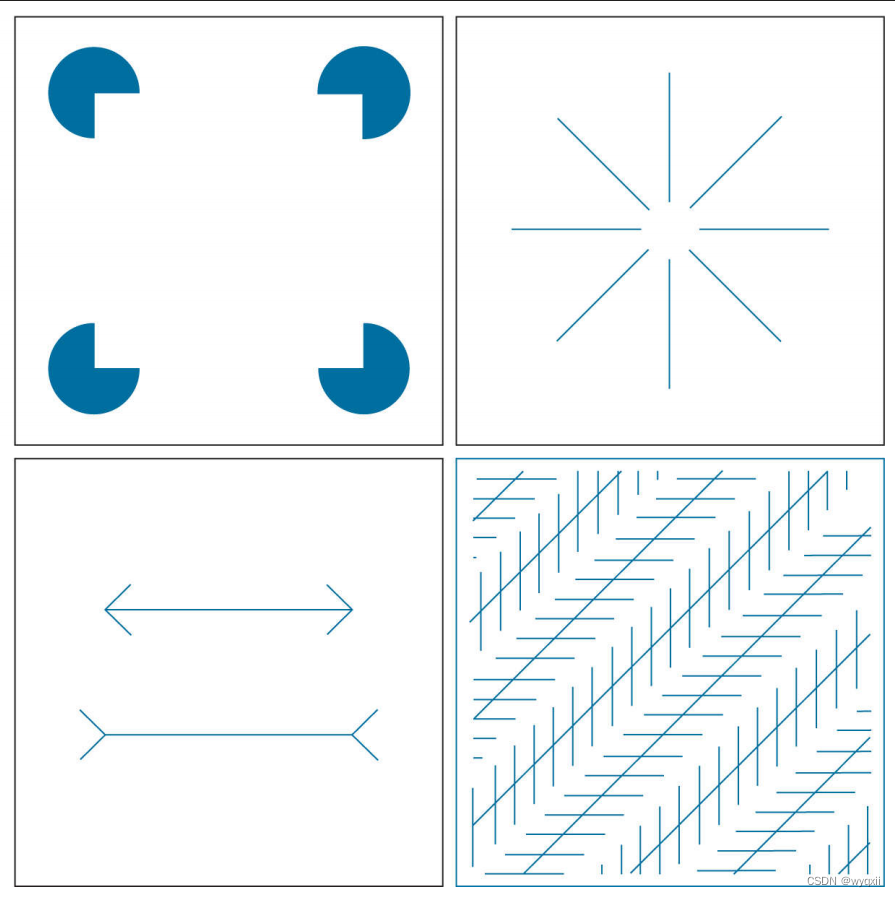
(3)错觉
在错觉中,人类眼睛填充了不存在的信息,或是错误地感知了物体的几何特征,例如:
2.2 光和电磁波谱
当一束太阳光通过一个玻璃棱镜时,显示的光束不再是白光,而是由一端为紫色而另一端为红色的连续色谱组成。如下图所示,我们感受到的可见光的色彩范围只占电磁波的一小部分。
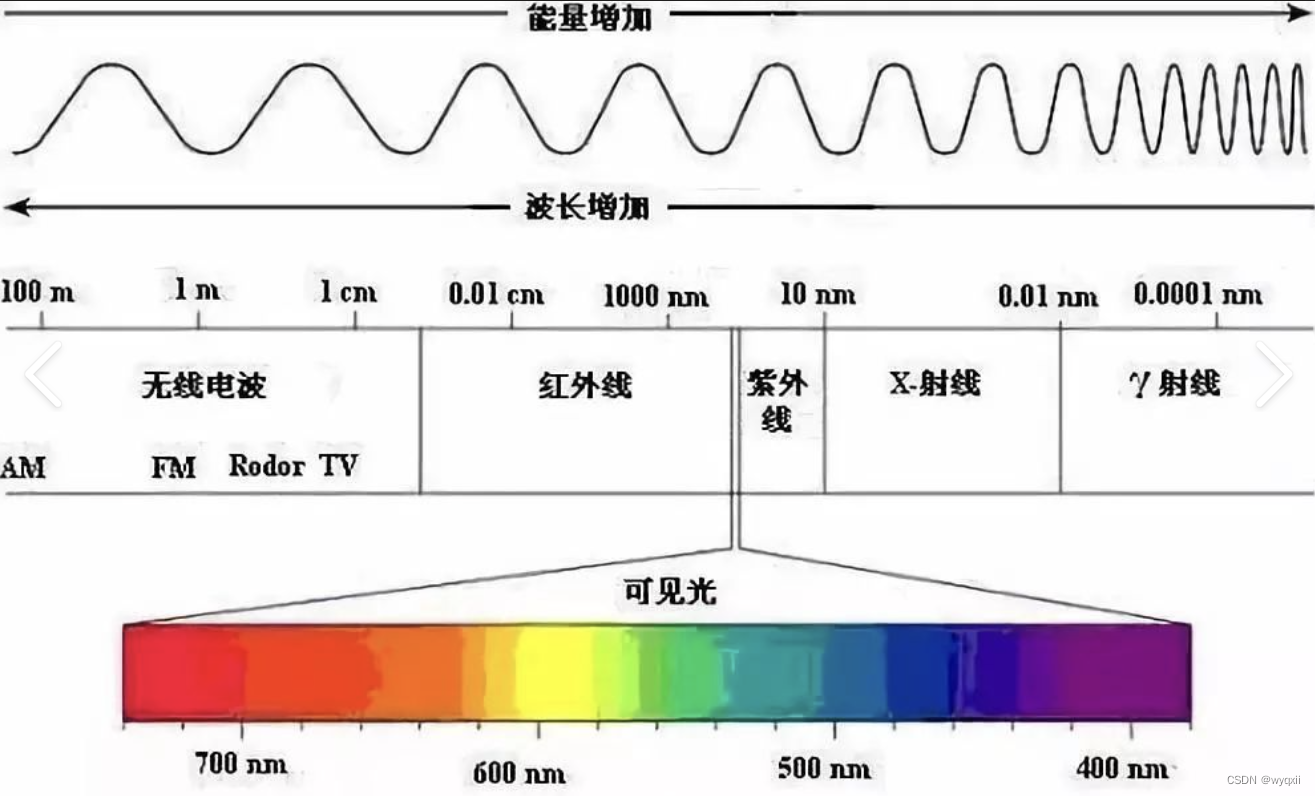
电磁波谱可用波长()、频率(
)或能量来描述。波长和频率的关系可用下式描述:
/
其中是光速。电磁波谱的各个分量的能量由下式给出:
其中h为普朗克常数。波长单位为米(m)。频率用赫兹(Hz)表示。1Hz表示每秒1个周期的正弦波。能量的单位是电子伏特。
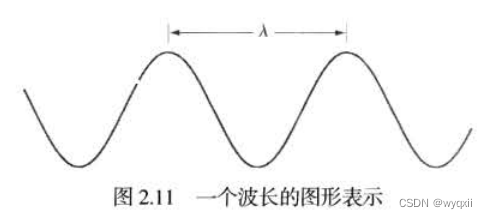
1.电磁波:可以看成是以波长传播的正弦波(如上图所示)。也可以看成是没有质量的粒子流,每个粒子以波的模式、以光速传播和移动。每个无质量的粒子包含一定(一束)的能量,每束能量称为一个光子(波粒二象性)。
2.可见光:可以被人眼感知的电磁波段。
3.物体的颜色:人感受一个物体的颜色是由物体反射光的性质决定的。若一个物体相对平衡地反射所有可见波长的光,那么这个物体对于观察者而言是白色的。
一个物体在可见光谱的有限范围内反射时会呈现各种颜色色调。例如,绿色物体反射波长范围为500~570nm的光,而吸收其他波长的光。
4.单色光:即没有颜色的光。单色光的唯一属性是它的强度或大小。
5.灰度级、灰度图像:人们用黑白灰变化来感知单色光的强度,所以用灰度级来表示单色光的强度。从黑到白的单色光的度量值范围通常称为灰度级,而单色图像称为灰度图像。
6.描述彩色光源质量的三个基本量:发光强度、光通量和亮度。
7.发光强度:从光源流出能量的总量,通常用瓦特(W)来度量。
8.光通量:观察者从光源感受到的能量,通常用流明数(lm)来度量。例如,从远红外光谱范围的光源发射出的光具有实际意义的能量,但观察者却很难感知到它。它的光通量几乎为零。
9.亮度:是光感知的主观描绘,实际上不能度量。它具体体现了强度的无色概念,是描绘彩色感觉的参数之一。
10.若有传感器检测到由一个电磁波谱波段发射的能量,就能在该波段上进行成像。
2.3 图像感知和获取
大多数图像,是由“照射”源和形成图像的“场景”元素对光能的反射或吸收,而产生的。
2.3.1反射与透射
依赖光源的特性,照射被物体反射或透射
(1)照射源被反射
人眼看到室外绿色的四叶草:在这个例子中,太阳是照射源,四叶草是场景元素,它是吸收+反射体。四叶草吸收其他所有颜色的光,但几乎不吸收绿色光,于是绿光被反射出来,使得人们看到绿色的四叶草。

(2)照射源的透射
第一张伦琴射线照片:阴极射线管是照射源,即X射线的发射体;伦琴夫人的手是场景元素,它是吸收体。成像原因:X射线穿过手组织,打到感光底片上。手掌中的骨骼和其它组织对X射线的吸收率不同,导致最终到达感光底片的X射线的亮度不同。

两个例子来源于——第二章 数字图像基础-(三)图像感知和获取 - 知乎 (zhihu.com)
2.3.2图像的获取
传感器的原理:传感器将输入的能量转为电压,并输出电压波形,最后将其数字化,使得每一个传感器都获得一个数字量。
1.使用单个传感器获取图像
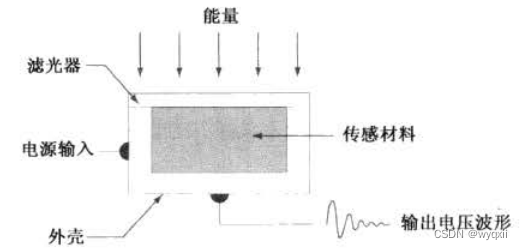
上图显示了单个传感器的部件。例如光二极管(最常见的单个传感器),它输出的电压波形与入射光强度成正比。
在传感器前面用一个滤光器可以改善选择性。例如,若要使传感器输出的绿光部分比可见光谱中的其他分量更强,那么可以在光传感器前面加一个绿色滤光器,使得绿光顺利通过。
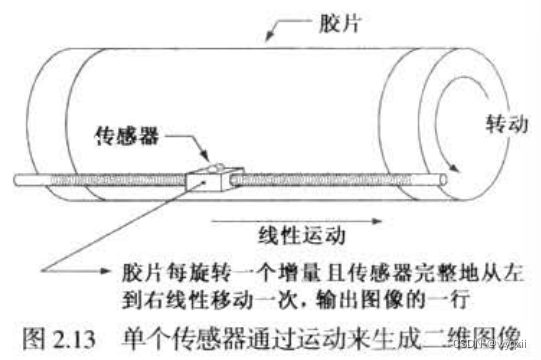
为使用单一传感器产生二维图像,在传感器和成像区域之间必须要有x方向和y方向的相对位移。上图是一个用于高精度扫描的装置。该装置内部有光源,外部为底片,底片每转动一下(y方向位移),传感器就从左到右运行一次(x方向位移),输出图像的一行。
这是得到高分辨率图像的一种廉价方法,缺点是速度较慢。
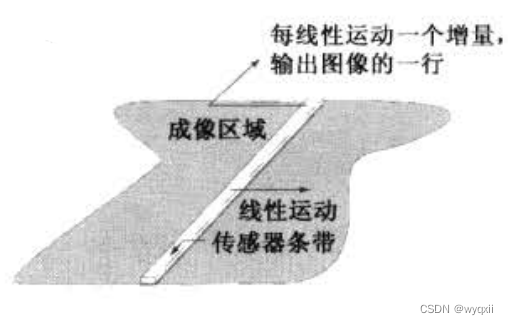
2.使用条带传感器获取图像

比单个传感器更常用的几何结构是由内嵌传感器形式组成的传感器带,如上图所示。
成像传感器带一次给出一幅图像的一行,传感器带的运动完成二维图像的另外一个维度。如下图:
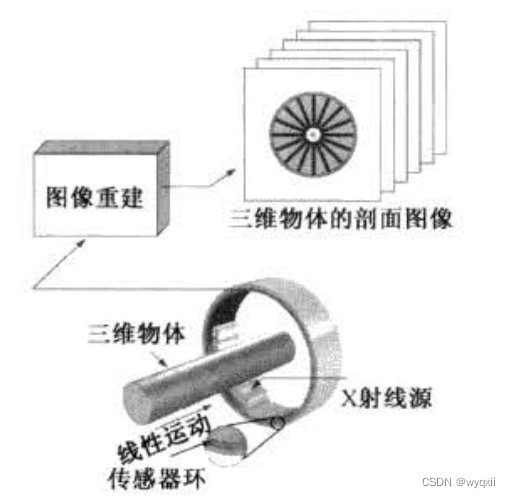
以圆环形方式安装的传感器带用于医学和工业成像,以得到三维物体的剖面图像,如下图。一个旋转的X射线源提供照射,射线对面的传感器则收集穿过物体的X射线能量。
3.使用传感器阵列获取图像
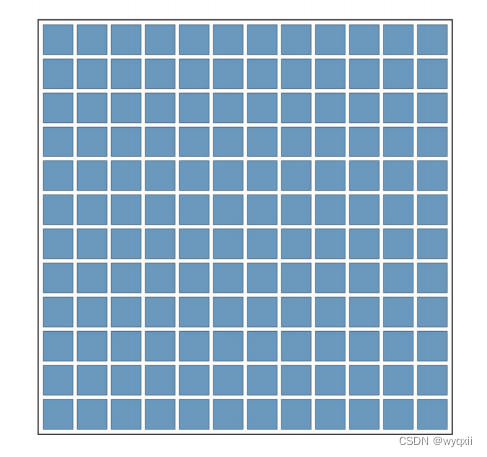
上图显示了以二维阵列形式排列的单独的传感器。每个传感器的输出正比于投射到传感器表面的光能总量。这种传感器的主要优点是将能量聚焦到阵列表面,以得到一幅完整的图像,而无需进行传感器的运动。
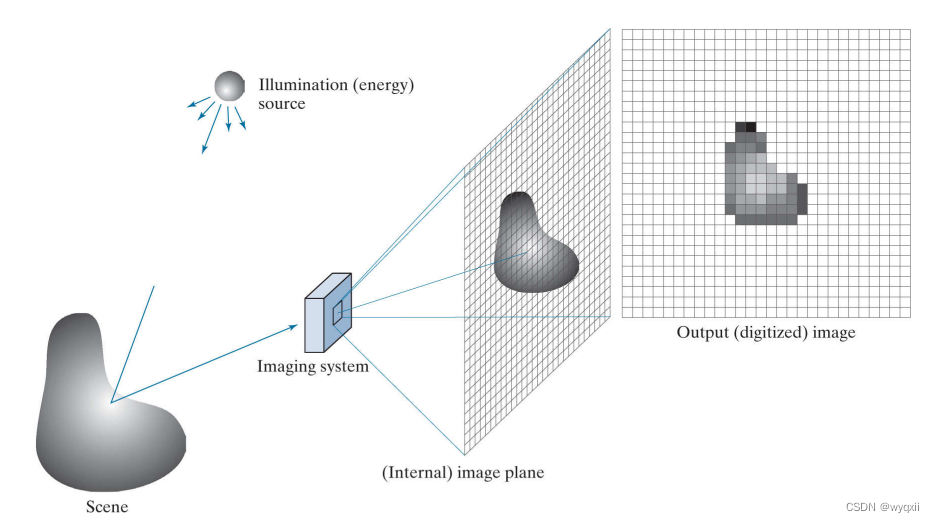
上图模拟了照射光后的成像过程:
(1)照射源照射在场景元素上,场景元素反射照射到光学透镜上
(2)光学透镜把观察到的场景投影到透镜的聚焦平面上
(3)与焦平面重合的传感器阵列产生与每个传感器接收到的光的总量成正比的输出
(4)数字或模拟电路扫描这些输出,并将其转换成模拟信号
(5)将模拟信号数字化,输出一幅数字图像
2.3.3 简单的图像形成模型
我们用二维函数来表示图像。在空间坐标
处,
的值或幅度是一个正的标量,其物理意义由图像源决定。当一幅图像由物理过程产生时,其亮度值正比于物理源(如电磁波)所辐射的能量。因此
一定是非零、有限的。
函数由两个分量来表征:
(1)入射分量:入射到被观察场景的光源照射总量,记为
(2)反射分量:场景中物体所反射的光照总量,记为
于是有
=
*
该式子指出反射分量限制在0(全吸收)到1(全反射)之间。
其中的性质取决于照射源;
的性质取决于场景元素的特性。
照射和反射的一些典型值:
在晴朗的白天,太阳在地面上可能会产生超过 90000的照度。
在有云的白天,这个数值下降到10000在晴朗的夜晚,满月情况下的照度大约为 0.1商用办公室的典型照度约为1000下面是的一些典型值:
黑天鹅绒为 0.01 ,不锈钢为 0.65 ,白色墙为 0.80, 镀银金属为 0.90 ,雪为 0.93
令单色图像在任何坐标处的强度(灰度)表示为:
实际上,和
。
区间称为灰度级(或强度级)















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









