







 本文详细探讨了相机的内参数和外参数。内参数涉及相机自身的特性,如焦距、像素大小,而外参数涉及相机在世界坐标系中的位置和旋转。齐次坐标用于表示刚体变换,相机成像模型考虑了像素尺寸、坐标系偏移和角度误差等因素。外参数则解决了世界坐标到相机坐标系的映射问题。
本文详细探讨了相机的内参数和外参数。内参数涉及相机自身的特性,如焦距、像素大小,而外参数涉及相机在世界坐标系中的位置和旋转。齐次坐标用于表示刚体变换,相机成像模型考虑了像素尺寸、坐标系偏移和角度误差等因素。外参数则解决了世界坐标到相机坐标系的映射问题。
相机内参数是与相机自身特性相关的参数,比如相机的焦距、像素大小等;相机的外参数是在世界坐标系中的参数,比如相机的位置、旋转方向等。在这一部分我们不考虑只有满足一定关系才能聚焦的限制和真实镜头的畸变效果。
刚体变换和齐次坐标
我们用齐次坐标来表达二维空间或者三维空间的一点,假设一点P在坐标系(F)=(O,i,j,k)中的坐标为:
则点P的坐标描述为:

相机内参数
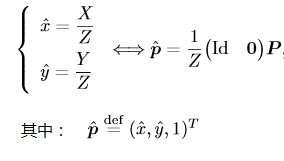
根据相机成像转换过程如下:
考虑到世界坐标系中,坐标的单位是m,像平面坐标系中,坐标的单位是像素,由于制造工艺的差异,不同相机的像素可能是正方形或者矩形,所以实际的变换矩阵横坐标和纵坐标需要再增加一个缩放参数k和l。于是相机成像模型变换为:
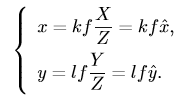
其中,f是焦距,单位是m,k与l的单位是pixel/m,相机的像素尺寸为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 8049
8049

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









