







SLAM (simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图构建,或并发建图与定位。 SLAM最早由Smith、Self和Cheeseman于1988年提出,被认为是实现真正全自主移动机器人的关键。
SLAM过程可以描述为:机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现机器人的自主定位和导航。
(1)定位(localization):机器人必须知道自己在环境中位置。
(2)建图(mapping):机器人必须记录环境中特征的位置(如果知道自己的位置)
(3)SLAM:机器人在定位的同时建立环境地图。其基本原理是运用概率统计的方法,通过多特征匹配来达到定位和减少定位误差的。
移动机器人自定位与环境建模问题是紧密相关的。环境模型的准确性依赖于定位精度,而定位的实现又离不开环境模型。在未知环境中,机器人没有什么参照物,只能依靠自己并不十分准确的传感器来获取外界信息,如同一个盲人在一个陌生环境中摸索的情况。这种情况下,定位是比较困难的。有地图的定位和有定位的地图创建都是容易解决的,但无地图的定位和未解决定位的地图创建如同”鸡–蛋”问题,无从下手。已有的研究中对这类问题的解决方法可分为两类:一类利用自身携带的多种内部传感器(包括里程仪、罗盘、加速度计等),通过多种传感信息的融合减少定位的误差,使用的融合算法多为基于卡尔曼滤波的方法。这类方法由于没有参考外部信息,在长时间的漫游后误差的积累会比较大。另一类方法在依靠内部传感器估计自身运动的同时,使用外部传感器(如激光测距仪、视觉等)感知环境,对获得的信息进行分析提取环境特征并保存,在下一步通过对环境特征的比较对自身位置进行校正。但这种方法依赖于能够取得环境特征。
SLAM的三个基本问题
Leonard和Durrant-Whyte将移动机器人完成任务定义为三个问题“Wheream I?”、“Wheream I going?”和“Howdo I getthere”,就是定位、目标识别和路径规划,为了能实现导航,移动机器人需要靠本体感受传感器和环境感知传感器来实现对本体位姿估计和外部环境位姿的定位。依据环境空间的描述方法,Desouza等将视觉导航的方法化为三类:
(1)已知地图的导航(Map-BasedNavigation):表示地图的方法几何特征(GeometricPrimitives)、拓扑特征(TopologicalFeatures)或占据栅格(OccupancyGrids)移动机器人依据这些已知的环境地图进行导航。
(2)地图建立的导航(Map-Building-BasedNavigation):在没有已知环境地图的情况下,移动机器人通过自身的导航运动和传感器的不断感知更新来进行导航。
(3)未知环境的导航(MaplessNavigation):相对于上面两种方法,在实时的动态环境中无法建立明确的地图表达形式,更多的是通过传感器获得的观测信息用来识别或者跟踪环境中的物体来导航。
但是由于感知信息的不确定性,移动机器人很难实现定位的准确,因而,在未知环境中的定位成为最关键的问题
定位(Wheream I?)是实现自主能力的最基本问题,是为了确定机器人在运行环境中相对于世界坐标系的位置及其本身的位姿。
移动机器人的定位与其它领域研究课题的关系如图所示:
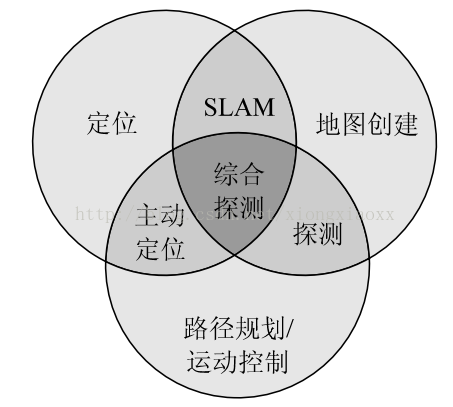
现有的移动机器人自主定位方法主要是局部定位和全局定位。局部是通过测量相对于机器人初始位姿的距离和方向来确定当前的位姿,但随着时间的累计造成定位的误差较大,无法精确定位。全局定位则通过测机器人的绝对位置来定位,定位的精度较高,并且可以用来修正局部定位的定位误差。
现在移动机器人定位的方法大致可分为三类
(1)相对定位(RelativePositionMeasurements):主要依靠内部本体感受传感器如里程计(Odometry)、陀螺仪(Gyroscopes)等,通过给定初始位姿,来测量相对于机器人初始位姿的距离和方向来确定当前机器人的位姿,也叫做航迹推测(DeadReckoning, DR)。
(2)绝对定位(AbsolutePosition Measurements):主要采用主动或被动标识(Activeor Passive Beacons)、地图匹配(MapMatching)、全球定位系统(GlobalPositioning System,GPS)、或导航信标(LandmarkNavigation)进行定位。位置的计算方法包括有三角测量法(Triangulation)、三边测量法(Trilateration)和模型匹配算法(ModelMatching)等。
(3)组合定位(CombinedPositionMethod):虽然相对定位这种方法能够根据运动学模型的自我推算移动机器人的位姿和轨迹而且具有自包含的有点。但是不可避免地会存在随时间的增加和距离的增加而增加的累积航迹误差。在绝对定位中,地图匹配技术处理数据速度较慢,而信标或标识牌的建设和维护成本太高,GPS又只能在室外使用。由于单一定位的方法的缺陷,移动机器人定位仍然是基于航迹的推算与绝对位姿和轨迹矫正相结合起来。
SLAM从研究方向划分,大概可分为BasicTheory、Sensor、Mapping、Loop Detection、Advanced Topic等
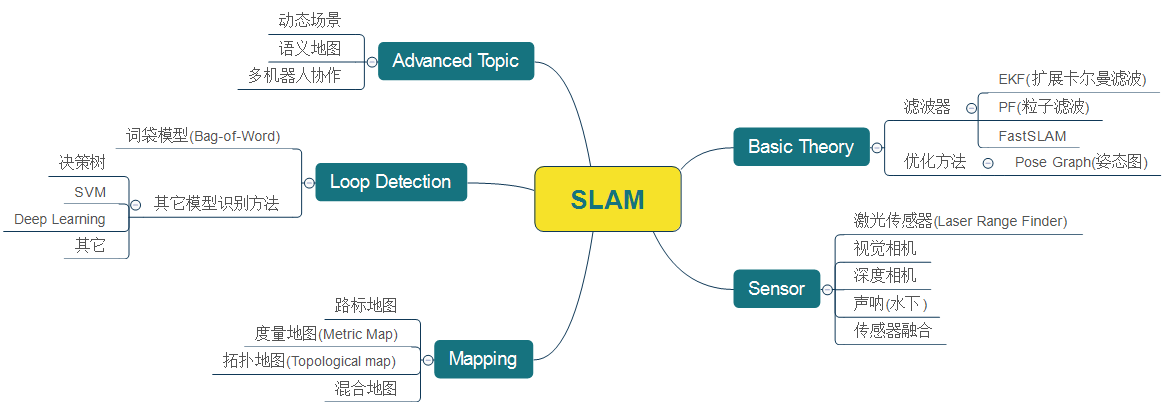
1、BasicTheory
SLAM的基本理论是指它所采用的数学模型,不同的数学模型决定了数据处理的方法。
不同的数学模型有各种的适用场景和优缺点。比如卡尔曼滤波器,优点在于理论非常成熟,缺点在于不适用于动态的场合和运行资源消耗。
2、Sensor
传感器是机器人感知世界的方式。传感器的选择和安装方式,决定了观测方程的具体形式,也在很大程度上影响着SLAM问题的难度。比如相机的安装方式,仰视和俯视比平视的SLAM问题要容易的多,因为俯视/仰视的SLAM的数据比较稳定,而平视容易受到各种东西的干扰。
3、Mapping
地图的组织构建主要有以下几种:
路标地图:
地图由一堆路标点组成,EKF中的地图就是这样的。但是,这种地图对展示很不友好。
度量地图:
通常指2D/3D的网格地图,也就是大家经常见的那种黑白的/点云式地图。点云地图比较酷炫,很有种高科技的感觉。它的优点是精度比较高,比如2D地图可以用0-1表示某个点是否可通过,对导航很有用。缺点是相当吃存储空间,特别是3D,把所有空间点都存起来了,然而大多数角角落落里的点除了好看之外都没什么意义。
拓扑地图:
拓扑地图是比度量地图更紧凑的一种地图。它将地图抽象为图论中的”点”和”边”,使之更符合人类的思维。比如说我要去五道口,不知道路,去问别人。那人肯定不会说,你先往前走621米,向左拐94.2度,再走1035米……(这是疯子吧)。正常人肯定会说,往前走到第二个十字路口,左拐,走到下一个红绿灯,等等。这就是拓扑地图。
混合地图。
综合各种地图的优点。
4、Loop Detection
回环检测,又称闭环检测(Loop closure detection),是指机器人识别曾到达场景的能力。如果检测成功,可以显著地减小累积误差。
回环检测目前多采用词袋模型(Bag-of-Word),研究计算机视觉的同学肯定不会陌生。它实质上是一个检测观测数据相似性的问题。在词袋模型中,我们提取每张图像中的特征,把它们的特征向量(descriptor)进行聚类,建立类别数据库。比如说,眼睛、鼻子、耳朵、嘴等等(实际当中没那么高级,基本上是一些边缘和角)。假设有10000个类吧。然后,对于每一个图像,可以分析它含有数据库中哪几个类。以1表示有,以0表示没有。那么,这个图像就可用10000维的一个向量来表达。而不同的图像,只要比较它们的向量即可。
回环检测也可以建成一个模型识别问题,所以你也可以使用各种机器学习的方法来做,比如什么决策树/SVM,也可以试试Deep Learning。不过实际当中要求实时检测,没有那么多时间让你训练分类器。所以SLAM更侧重在线的学习方法。
5、Advanced Topic
因为实际环境往往非常复杂。灯光会变,太阳东升西落,不断的有人从门里面进进出出,并不是一间安安静静的空屋子,让一个机器人以2cm/s的速度慢慢逛。论文中看起来酷炫的算法,在实际环境中往往捉襟见肘,处处碰壁。向实际环境挑战,是SLAM技术的主要发展方向,也就是我们所说的高级话题。主要有:动态场景、语义地图、多机器人协作等等。
参考文档:
http://blog.csdn.net/lcj_cjfykx/article/details/46407911

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









