







 超级会员免费看
超级会员免费看
简介:
双差速轮AGV(Automated Guided Vehicle)是一种常见的移动机器人结构,采用两侧独立驱动的车轮,通过控制左右轮的转速差实现运动和转向。理解其运动学正解(由轮速求车辆运动)和逆解(由期望运动求轮速)对于AGV的设计和控制至关重要。
运动学模型建立:
定义变量
- 𝑣:AGV的线速度(质心速度),单位:米/秒(m/s)
- 𝜔:AGV的角速度(绕质心的旋转速度),单位:弧度/秒(rad/s)
- 𝑣L、𝑣R :左、右轮的线速度,单位:米/秒(m/s)
- 𝜔L、𝜔R:左、右轮的角速度,单位:弧度/秒(rad/s)
- r:车轮半径,单位:米(m)
- 𝐿:左右车轮之间的轴距(轮间距),单位:米(m)
- (x,y,θ):AGV在全局坐标系中的位置和朝向
运动学正解(Forward Kinematics):
- 已知左右轮的角速度,求AGV的线速度、角速度和位姿变化。
步骤:
- 1、计算左右轮的线速度:

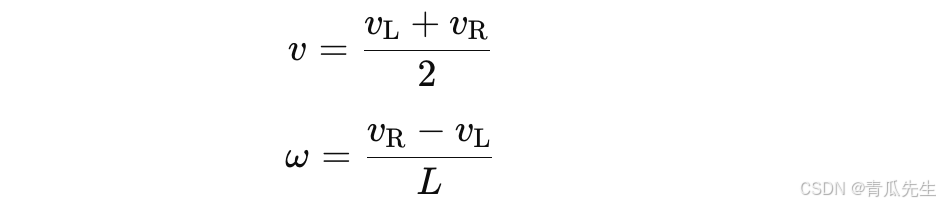
- 2、计算AGV的线速度和角速度:
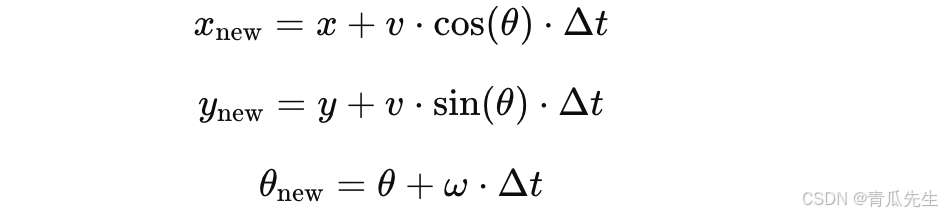
- 3、更新AGV的位姿(在小时间间隔 Δt 内):
示例:
假设:
- 车轮半径 r=0.1 m
- 轴距 L=0.5 m
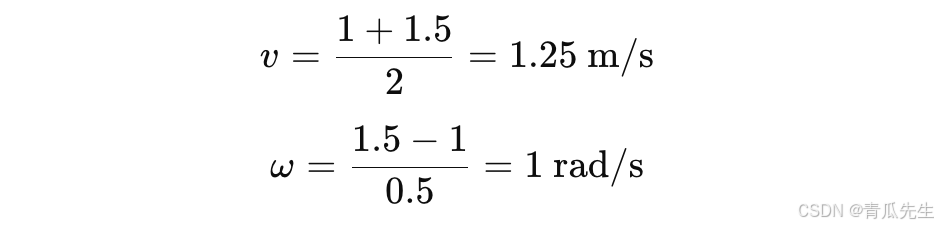
- 左轮角速度 𝜔L=10 rad/s
- 右轮角速度 𝜔R=15 rad/s
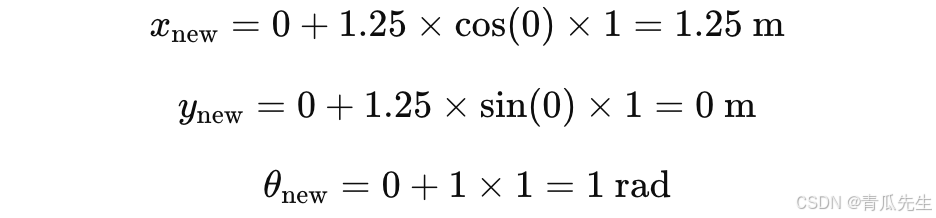
- 初始位姿 (x,y,θ)=(0,0,0)
- 时间间隔 Δt=1s
计算:
- 1、左右轮线速度:

- 2、AGV的线速度和角速度:
- 3、更新位姿:
运动学逆解(Inverse Kinematics):
- 已知AGV的线速度和角速度,求左右轮的线速度、角速度。
步骤:
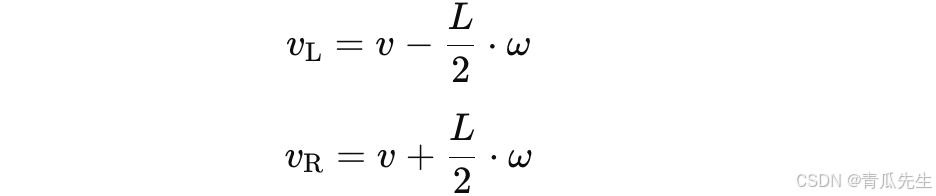
1、计算左右轮的线速度:
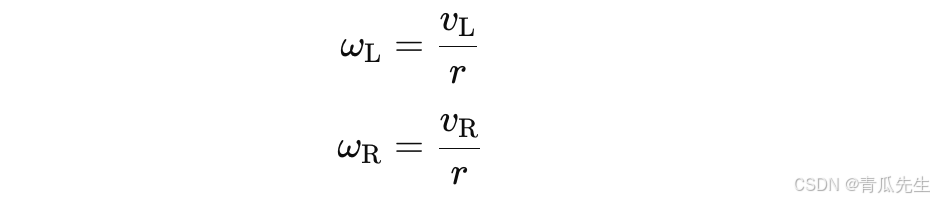
2、计算左右轮的角速度:
示例:
假设:
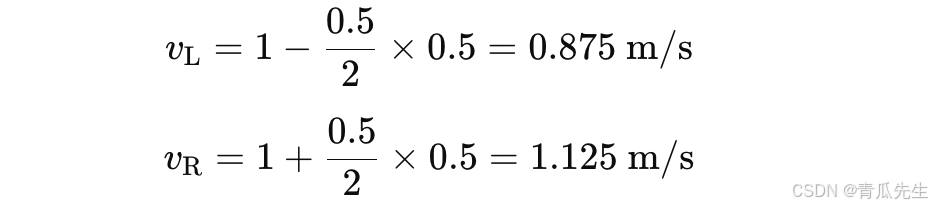
- 期望AGV线速度 v=1 m/s
- 期望AGV角速度 ω=0.5 rad/s
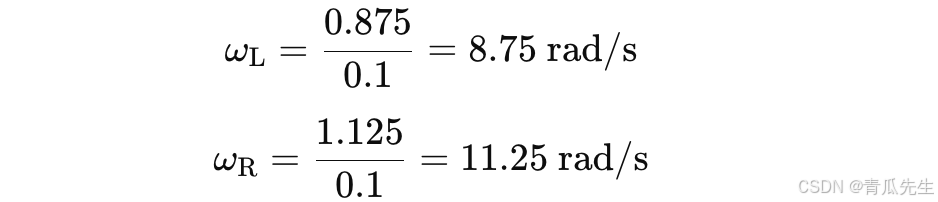
- 车轮半径 r=0.1 m
- 轴距 L=0.5 m
计算:
- 1、左右轮线速度:
- 2、左右轮角速度:
注意事项:
- 速度限制: 确保计算得到的轮速不超过电机和驱动系统的最大能力。
- 轮滑和打滑: 理论模型假设轮子与地面无滑动,实际应用中应考虑轮滑对控制的影响。
- 控制周期: 在实际控制中,选择合适的控制周期 Δt 以平衡控制精度和计算负荷。
- 单位一致性: 确保所有计算中的单位一致,避免因单位不一致导致的计算错误。
实现代码
以下是双差速轮AGV运动学正解和逆解的C++实现代码。代码包括了计算AGV的线速度和角速度(正解),以及根据期望的线速度和角速度计算左右轮的角速度(逆解)。
#include <iostream>
#include <cmath>
const double PI = 3.14159265358979323846;
// AGV参数
struct AGVParameters {
double wheel_radius; // 车轮半径(单位:米)
double axle_length; // 轮间距(轴距,单位:米)
};
// AGV状态
struct AGVState {
double x; // X位置(单位:米)
double y; // Y位置(单位:米)
double theta; // 朝向角(单位:弧度)
};
// 轮速
struct WheelSpeeds {
double left; // 左轮角速度(单位:弧度/秒)
double right; // 右轮角速度(单位:弧度/秒)
};
// 线速度和角速度
struct Velocity {
double linear; // 线速度(单位:米/秒)
double angular; // 角速度(单位:弧度/秒)
};
// 运动学正解:由轮速计算AGV速度
Velocity forwardKinematics(const WheelSpeeds& wheel_speeds, const AGVParameters& params) {
// 计算左右轮的线速度
double v_left = params.wheel_radius * wheel_speeds.left;
double v_right = params.wheel_radius * wheel_speeds.right;
// 计算AGV的线速度和角速度
Velocity vel;
vel.linear = (v_left + v_right) / 2.0;
vel.angular = (v_right - v_left) / params.axle_length;
return vel;
}
// 运动学逆解:由AGV速度计算轮速
WheelSpeeds inverseKinematics(const Velocity& vel, const AGVParameters& params) {
// 计算左右轮的线速度
double v_left = vel.linear - (params.axle_length / 2.0) * vel.angular;
double v_right = vel.linear + (params.axle_length / 2.0) * vel.angular;
// 转换为轮的角速度
WheelSpeeds wheel_speeds;
wheel_speeds.left = v_left / params.wheel_radius;
wheel_speeds.right = v_right / params.wheel_radius;
return wheel_speeds;
}
// 更新AGV的位姿
void updateAGVState(AGVState& state, const Velocity& vel, double delta_time) {
state.x += vel.linear * cos(state.theta) * delta_time;
state.y += vel.linear * sin(state.theta) * delta_time;
state.theta += vel.angular * delta_time;
// 确保theta在[-pi, pi]范围内
if (state.theta > PI) {
state.theta -= 2 * PI;
} else if (state.theta < -PI) {
state.theta += 2 * PI;
}
}
int main() {
// 初始化AGV参数
AGVParameters params;
params.wheel_radius = 0.1; // 车轮半径为0.1米
params.axle_length = 0.5; // 轴距为0.5米
// 初始化AGV状态
AGVState state;
state.x = 0.0;
state.y = 0.0;
state.theta = 0.0;
// 设置时间步长
double delta_time = 0.1; // 时间步长为0.1秒
// 示例:运动学逆解
Velocity desired_vel;
desired_vel.linear = 1.0; // 期望线速度1.0 m/s
desired_vel.angular = 0.5; // 期望角速度0.5 rad/s
// 计算需要的轮速
WheelSpeeds wheel_speeds = inverseKinematics(desired_vel, params);
std::cout << "需要的左轮角速度: " << wheel_speeds.left << " rad/s" << std::endl;
std::cout << "需要的右轮角速度: " << wheel_speeds.right << " rad/s" << std::endl;
// 模拟运动一段时间
for (int i = 0; i < 50; ++i) {
// 使用轮速计算当前速度(运动学正解)
Velocity current_vel = forwardKinematics(wheel_speeds, params);
// 更新AGV状态
updateAGVState(state, current_vel, delta_time);
// 输出当前状态
std::cout << "时间: " << (i + 1) * delta_time << " s, "
<< "位置: (" << state.x << ", " << state.y << "), "
<< "朝向: " << state.theta << " rad" << std::endl;
}
return 0;
}
代码说明:
- AGVParameters:定义AGV的物理参数,包括车轮半径和轴距。
- AGVState:存储AGV的位姿信息,包括位置(x, y)和朝向角(theta)。
- WheelSpeeds:左右轮的角速度。
- Velocity:AGV的线速度和角速度。
主要函数:
forwardKinematics:
- 输入:轮速(WheelSpeeds)和AGV参数(AGVParameters)。
- 输出:AGV的线速度和角速度(Velocity)。
- 功能:根据左右轮的角速度计算AGV的线速度和角速度。
inverseKinematics:
- 输入:期望的AGV线速度和角速度(Velocity)以及AGV参数(AGVParameters)。
- 输出:需要的左右轮角速度(WheelSpeeds)。
- 功能:根据期望的AGV运动,计算所需的左右轮角速度。
updateAGVState:
- 输入:当前AGV状态(AGVState)、AGV速度(Velocity)和时间步长(delta_time)。
- 输出:无(直接修改AGVState)。
- 功能:根据当前速度和时间步长,更新AGV的位姿。
使用示例:
- 在main函数中,首先设置了AGV的参数和初始状态。
- 指定了期望的线速度和角速度,然后使用逆运动学计算需要的轮速。
- 通过一个循环,模拟了AGV在指定轮速下的运动,每次迭代更新AGV的位姿并输出当前状态。
注意事项:
- 该代码假设AGV在理想条件下运行,没有考虑轮滑、摩擦等因素。
- 为了模拟连续运动,使用了时间步长delta_time,在实际应用中应根据控制器的更新频率调整。
- 为了保持朝向角theta在−π到π之间,添加了角度归一化的处理。

















 550
550

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









