






#背景
单舵轮AGV是由一个主动轮(驱动轮)+左右两个从动轮组成的AGV结构,在SLAM建图与导航中,需要根据电机编码器采集的信息和运动学模型去获取AGV的里程计信息(任一时刻的位置和姿态——位姿)。
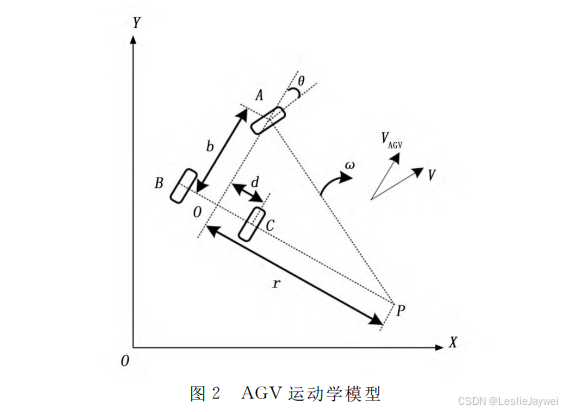
#运动学模型示意图中注意的点
- V 是舵轮的瞬时驱动速度(电机返回的数值),方向始终沿着舵轮的正前方;Vagv是AGV小车的速度。
- AGV在
时刻的位姿为(
),在
时刻的位姿为
,其中位置(x,y)是在里程计坐标系(odom)下确定的,但是这个姿态(角度)是车体中心轴线与里程计坐标系x轴正向的夹角。
- 要考虑各种夹角的正反和小车位于里程计坐标系的那个象限。

参考文献:
自动导引车车载系统研究与实现-浙大 范堃
单舵轮 AGV叉车的高精度导航 算法研究与应用-刘志成 青岛科技大学
单舵轮 AGV叉车的激光雷达定位与路径跟踪-姚 铭 清华大学学报 (自然科学版)

















 1319
1319

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









