







自校准(对任意环境非白墙 注意距离0.4-2米之间,深度(相机拍摄内容中物体所占空间)≥50%)
①:打开Intel realSense viewer
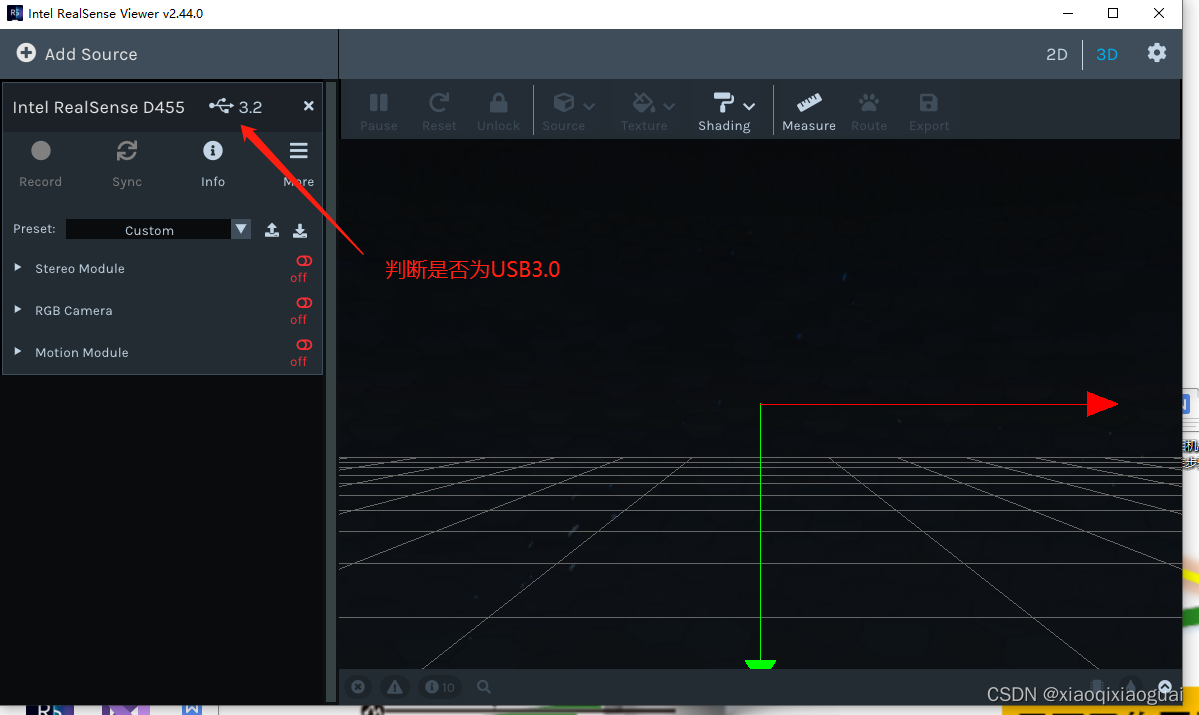
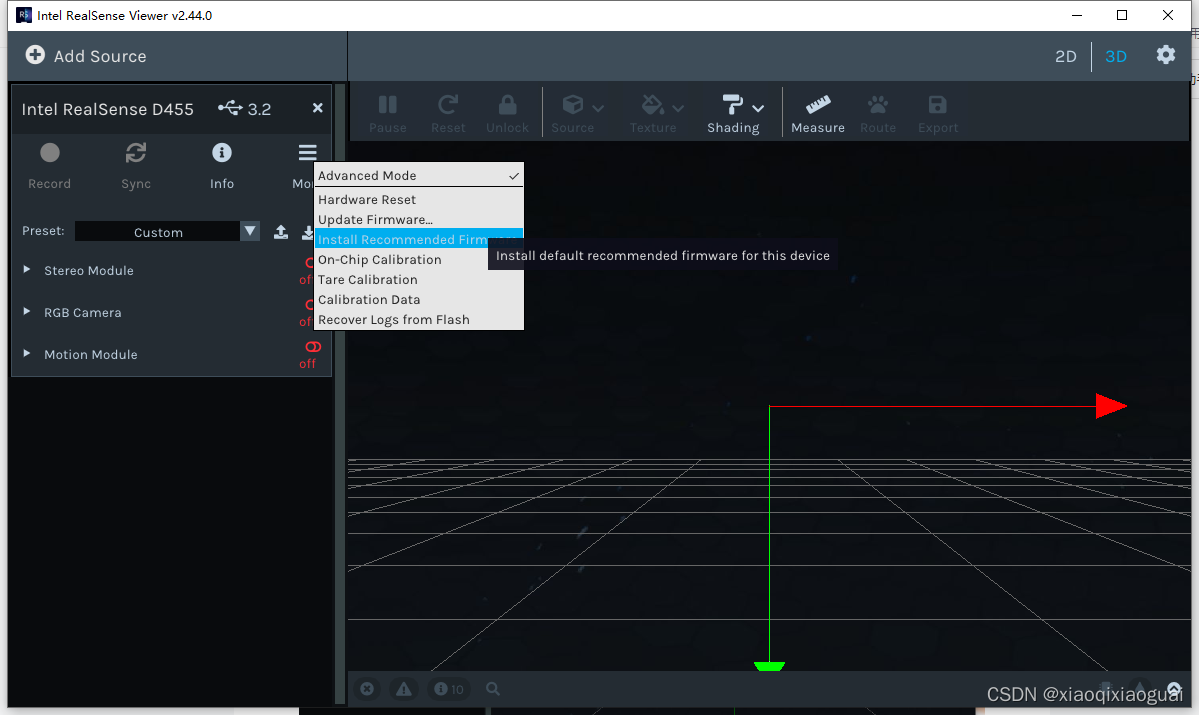
②:连接设备(注意要用3.0USB,可以通过显示3.x判断)后,选择more->Install Recommended Firmware(推荐安装固件)更新固件
③:选择more->on-Chip Calibration(片上校准)
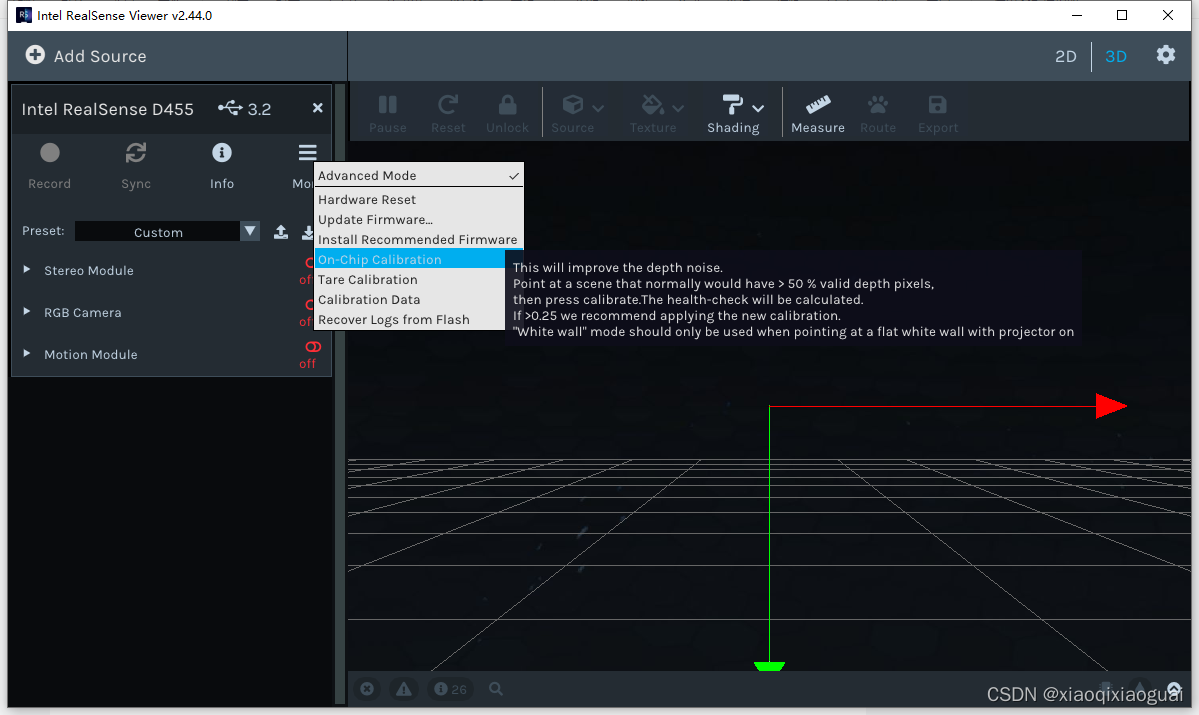
③:会打开如下图Intrinsic内参调节
Extrinsic外参调节

选择calibrate开始校准(以内参调节为例)
④:得到下图
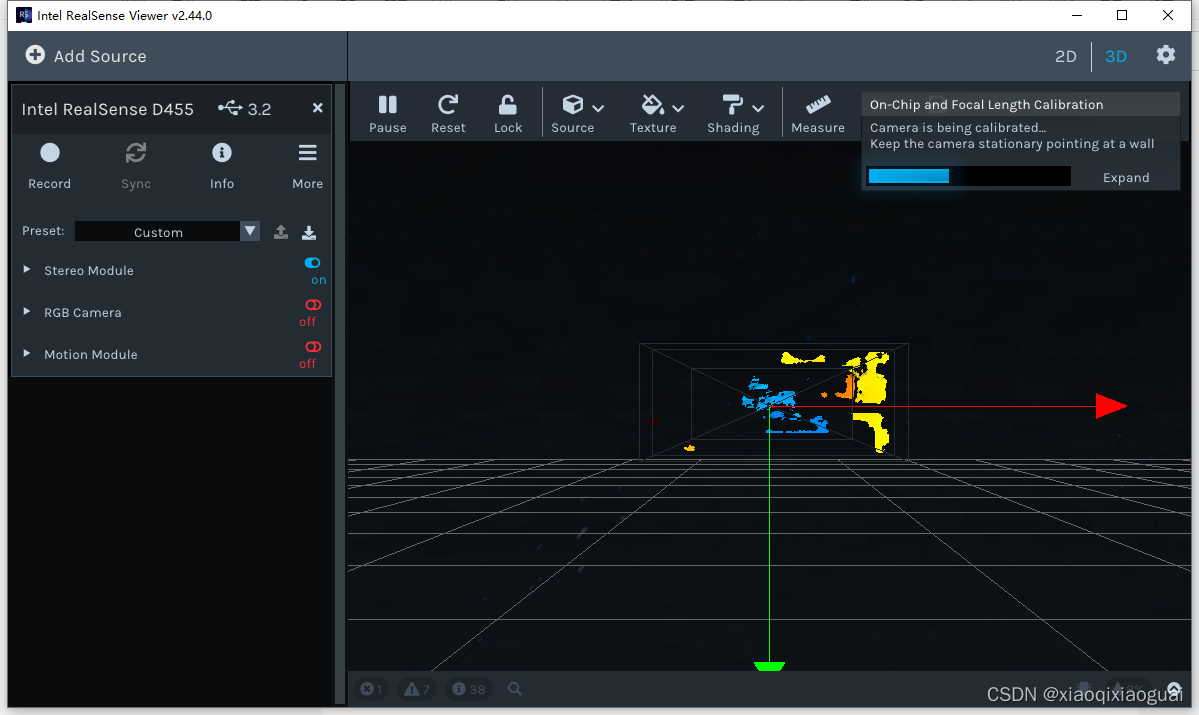
等待进度条加载完成(注意距离以及深度可能会影响自校准,导致校准失败报错:occ all calibraton cannot work with this camera 如果出现这样报错只需要改变相机到目标物体距离以及摄像机镜头里物体深度占比)
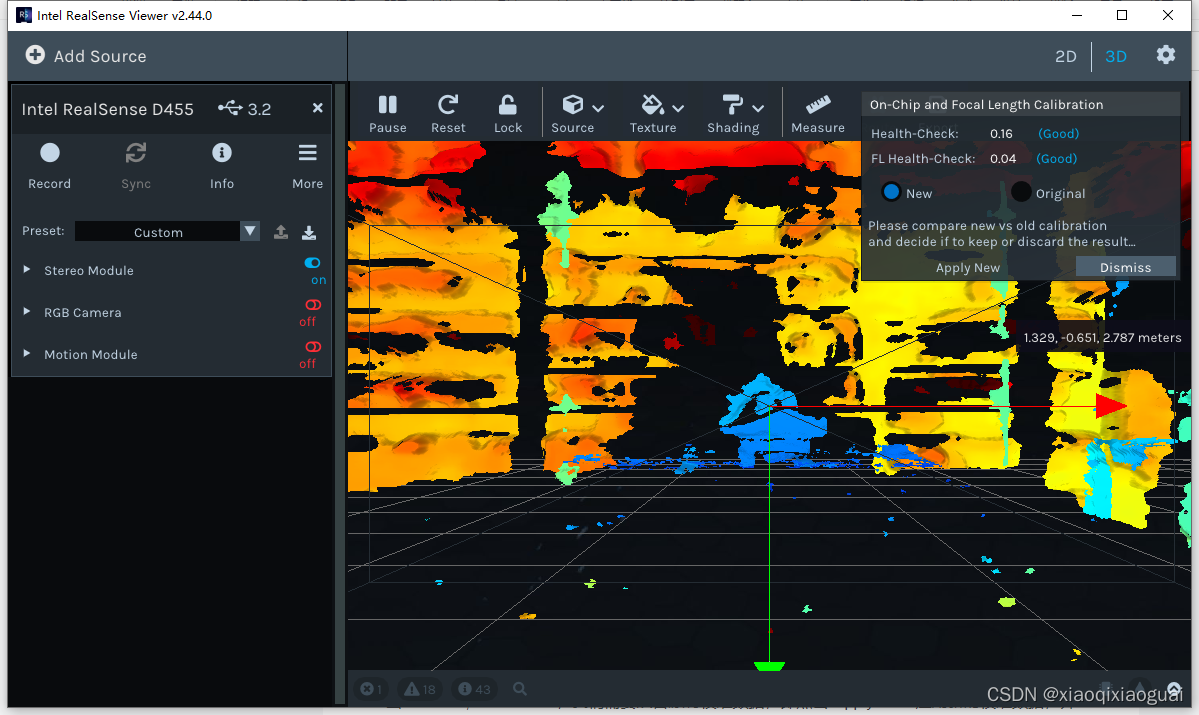
上方出现的弹窗中,我们能够看到两项数值Health-Check(下面简称HC)和FL Health-Check(下面简称FL HC)
校准标准:
当HC<0.25,FL HC<0.15,我们可以保留原有校准数据,即点击“Dismiss”忽略。
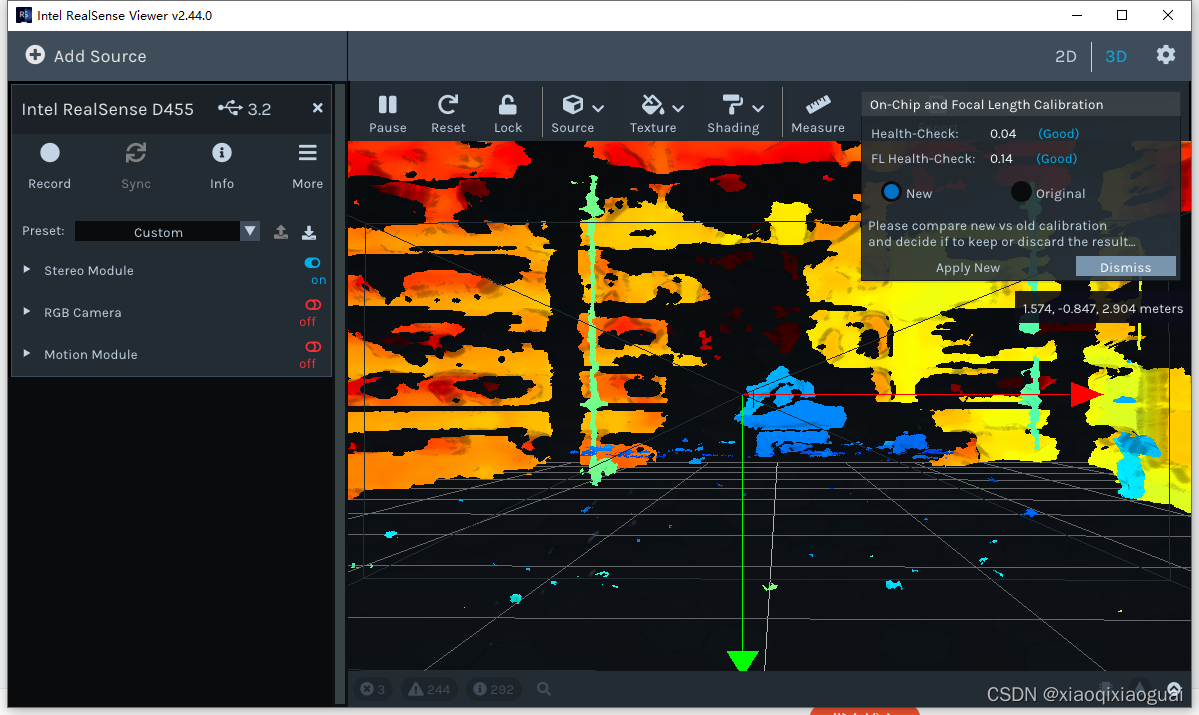
当HC>0.25,FL HC>0.15,我们需要改善原有校准数据,即点击“Apply New”应用新的校准数据,并且再运行一次On-Chip Calibration ,继续观察两项数值,直至它们分别低于0.25和0.15,
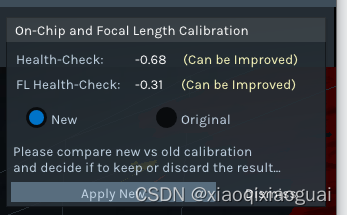
若HC或FL HC>0.75,原有校准数据必须要进行改善,并且建议直接使用动态校准或OEM校准(Intel英特尔RealSense实感深度摄像头 OEM校准操作步骤讲解OEM Calibration 恢复出厂精度)

















 4849
4849

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









