






二维码潜伏式AGV(D500)是一种背负式搬运产品。该产品机械结构、控制系统、安全系统、上位机系统等均为公司物流自主研发,具有完全自主知识产权。可适用于各种物流仓库的实际业务场景。
二维码潜伏式AGV(D500)的最高行走速度可达2m/s,可根据安全决策实现实时安全速度调整,防止碰撞以保证设备及人员安全。
1.主要结构描述
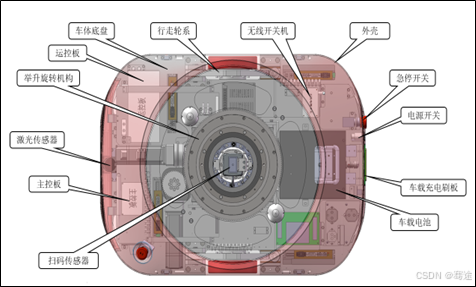
二维码潜伏式AGV(D500)机械系统由底盘系统、传动系统、上装机构和本体外壳组成。
2.底盘系统
采用高强度整体钢板焊接底盘,保证机械强度、加工精度;在底盘上设计有各种零部件安装接口,如顶升机构、电机、电池、驱动器、嵌入式主控、运控PCB板等。
3.传动系统
行走传动系统由安装于机器人底盘两侧的驱动轮组成,每个驱动轮由一套独立的伺服驱动系统控制,可以实现驱动轮精确的速度和位置闭环控制。单独的驱动轮控制方式,可以实现机器人灵活的路径控制,直线向前、直线向后、原地旋转、弧线路径等。
4.上装机构
上装机构分为举升和旋转机构,举升机构可实现货物顶起和放下。旋转机构可实现货物相对于车体转动,从而实现货架换面功能。
举升机构,采用螺旋传动方式,由机构伺服电机通过驱动减速机、相啮合齿轮实现来旋升筒转动,转盘轴承组件固定在旋升筒上,当电机转动时,旋升筒会被旋上或旋下,带托盘的上升和下降,实现机器人对货物的托举功能。
行走轮差速转向与旋转机构配合可实现车体转向时货架的相对静止状态。
5.本体外壳
本体外壳采用高强度ABS工程塑料材质,银黑色为主色调。外壳上安装有多种功能性按键、指示灯、通信接口等。外壳涂装有小车本体车号及公司标识。
6.电气控制
二维码潜伏式AGV(D500)电气系统包括控制系统、电源系统、驱动系统、传感器系统。
7.控制系统
控制系统由两套高性能嵌入式软硬件系统组成,主要有如下功能:
- 指令解析:接收服务器指令并解析,上报机器人运行状态参数。
- 无线通信:实现机器人和服务器之间高速的WIFI通信。
- 导航数据处理:实现机器人相对和绝对位置导航融合控制。
- 图像处理:机器人具有双摄像头,图像处理器实现双摄像头高速的二维码图像处理功能,提供可靠二维码状态信息。
- 路径控制:完成机器人路径导航、偏差控制、路径控制等功能。
其中左轮伺服驱动、右轮伺服驱动和上装旋转伺服驱动属于闭环伺服控制,上装升降驱动属于开环驱动。
3.传感系统
-
1.电源系统
电源系统主要包括48V锂电池以及DC48-DC24/5V开关电源,是机器人的能量来源,主要是基于动力电池、辅助电池管理、充电管理系统组成,主要有如下功能:
- 提供可靠电力,保证机器人高强度高功耗运转。
- 电源管理,实现电池状态监控和保护,实现电力系统安全可靠运转,同时给主控系统提供电力系统状态信息。
- 充电管理,实现机器人充电逻辑控制,并实现充电中电力系统安全管理功能。
-
2.驱动系统
-
机器人是多电机伺服系统组成,每个伺服电机由单独的伺服驱动器控制,挂在机器人控制总线上,驱动轮电机、升降、旋转电机,都可以由主控实现精确的位置和速度运动控制。主要包括:
- 左轮伺服驱动。
- 右轮伺服驱动。
- 上装旋转伺服驱动。
- 上装升降调速驱动。
传感系统实现机器人内部各种状态反馈,主要有如下3个模块:
位置检测传感器:用于检测机器人内部运动部件位置,反馈位置信息;包括升降上限位、升降下限位、托盘旋转位置检测。 障碍检测传感器:利用激光防撞传感器实现检测机器人前方障碍物的相对位置,配合主控逻辑实现避障功能。
系统状态传感器:包括各模块温度、电流电压监控、异常状态检测功能。
-
- 二维码扫描传感器:用于扫描货架码和地标码。
-
4.导航技术
-
二维码潜伏式AGV通过WIFI无线网络与控制台、数据中心、FTP服务器进行通信。
导航定位传感器依赖激光/视觉、光电、陀螺仪等设备采集环境数据,经过特征数据提取,传感器融合及定位运算等技术,实时获取AGV的位姿信息。作为AGV控制系统的“眼睛”,导航传感器需具备高精度、高速度、高可靠性三各方面的特征,才能确保AGV的正常运行。
- 地面二维码传感器
-
AGV采用惯性导航加二维码导航方式,利用高精度伺服控制算法,实现较高速运行速度和毫米级定位精度。采用智能路径规划算法,实现最优路径选择,使搬运的路线更为灵活。机器人具有完善的环境感知能力,可以监测周围障碍物,机器人与外界物体及机器人本体之间通过安全防撞系统实现避障功能。
基于地面二维码导航方式的AGV在高速运行过程中,通过辨识张贴于地面的二维码坐标信息,实现自身的导航定位。地面二维码传感器(PGV)是一款AGV导航用DM二维码读码器。它能够拍摄地面上铺设的二维码图像数据,经过算法处理,向AGV控制系统输出PGV中心和二维码中心的偏差XY和偏角,进而实现对AGV的导航。
下图为地标码样式,正面摆放,右侧黑色实心箭头方向为X+方向、上侧黑色实心箭头为Y+方向,坐标系中任何一点坐标值及方向一旦定义,该坐标系已经建立。X、Y的正方向与地图中X、Y的正方向一致。标签由8位数字组成,前面4位代表X坐标,后4位代表Y坐标,原点是从1001,1001起;X、Y的正方向与地图中XY的正方向一致,地标码上的坐标按施工图中的规则贴粘,每个地标码准确粘贴在场地划线交叉点位上,并保证尺寸和角度精度。
-

- 货架(托盘)二维码传感器
-
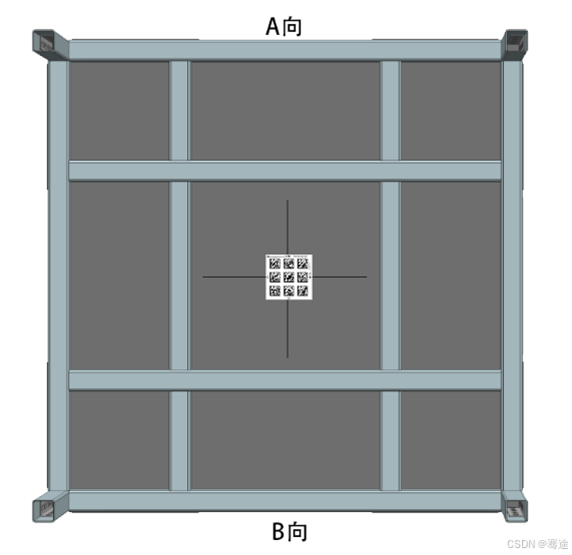
主要功能:在货架下方触发读码器工作,识别当前货架(托盘)二维码的码值以及位姿信息。
二维码潜伏式AGV中部位置安装有顶扫摄像头,由3X3矩阵组成,可识别货架(托盘)码。货架码尺寸:80mm*80mm*1.5mm,材质PVC,利用二维码生成工具生成相对应的货架码。二维码粘贴时需要按下图所示方向粘贴。
-
- 产品特点
- 采用CMOS获取高分辨率数字图像。
- 有效应对二维码的脏污、缺损以及外界可见干扰光等情形。
- 可高效准确识别自研二维码。
- 常见故障及处理方法
- USB读码器常见错误有三种,可以通过AGV上报的异常来进行判断。

















 1403
1403

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









