







文章目录
前言
MobileNet网络专注于移动端或者嵌入式设备中的轻量级CNN,相比于传统卷积神经网络,在准确率小幅度降低的前提下大大减少模型参数与运算量。
MobileNetV1模型介绍
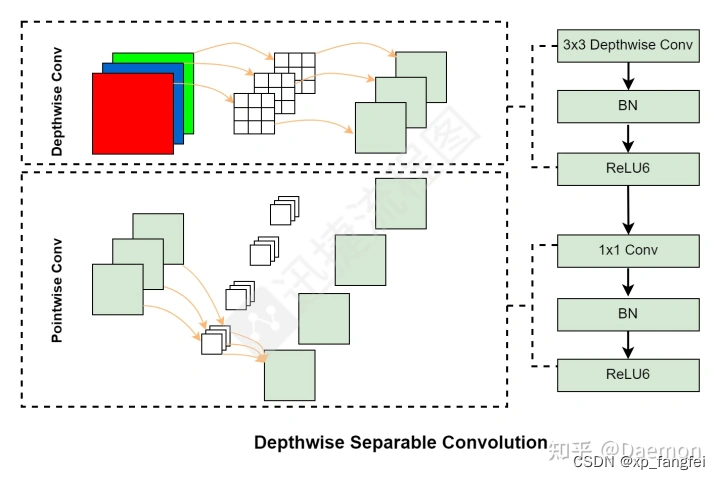
MobileNetV1提出了 Depthwise Separable Convolutions(深度可分离卷积);深度可分离卷积过程被拆分成了两个部分:深度卷积(Depthwise Convolution)与逐点卷积层(Pointwise Convolution)。
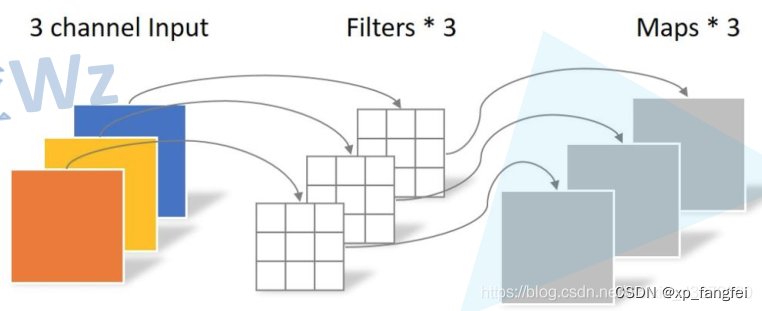
DW(Depthwise Convolution)卷积
DW卷积中,每个卷积核的channel都为1,每个卷积核只负责与输入特征矩阵中的1个channel进行卷积运算,然后再得到相应的输出特征矩阵中的1个channel。
如下图所示:
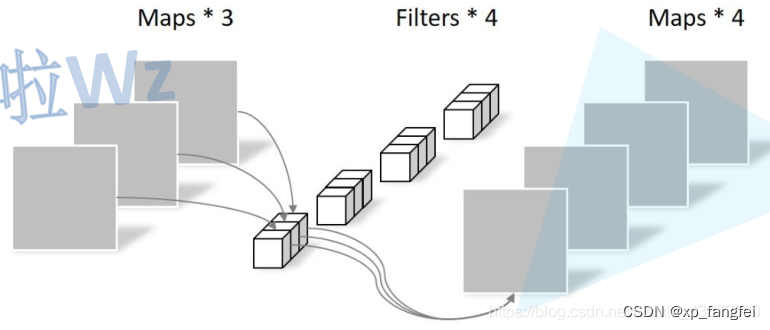
PW (Pointwise Convolution)卷积
PW卷积的特点是卷积核的维度是1*1,从输入到输出可以改变维度,DW和PW通常是一起使用。
深度可分离卷积(DW+PW)
1、深度可分离卷积的计算量
对于深度可分离卷积的DW部分,设输入特征图通道数为M,对特征图进行卷积的核大小为K,则该部分的计算量:
K
∗
K
∗
M
K*K*M
K∗K∗M
对于深度可分离卷积的PW部分,设输出特征图通道数为N,该部分的计算量:
1
∗
1
∗
M
∗
N
1*1*M*N
1∗1∗M∗N
则深度可分离卷积的计算量为:
K
∗
K
∗
M
+
1
∗
1
∗
M
∗
N
K*K*M + 1*1*M*N
K∗K∗M+1∗1∗M∗N
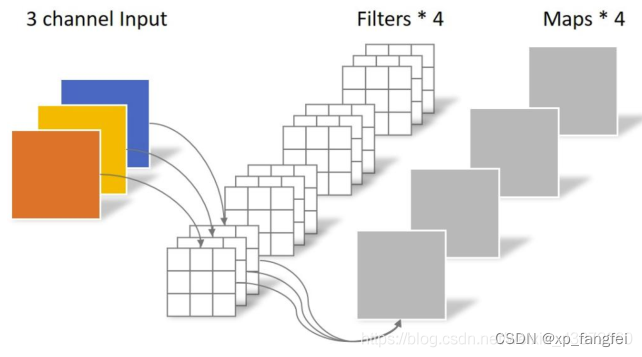
2、传统卷积的计算量
设输入特征图像的通道为M,输出特征图像的通道为N,对输入特征图像进行卷积的卷积核大小为K,则传统卷积的计算量为:
K
∗
K
∗
M
∗
N
K*K*M*N
K∗K∗M∗N
3、深度可分离卷积和传统卷积比值
深度可分离卷积的计算量要比传统卷积计算量小,从以下比值可以可以看出:
深度可分离卷积
传统卷积
=
K
∗
K
∗
M
+
1
∗
1
∗
M
∗
N
K
∗
K
∗
M
∗
N
=
1
N
+
1
K
2
{深度可分离卷积\over 传统卷积}={K*K*M + 1*1*M*N \over K*K*M*N }= {1\over N }+{1\over K^2 }
传统卷积深度可分离卷积=K∗K∗M∗NK∗K∗M+1∗1∗M∗N=N1+K21
理论上普通卷积计算量是DW+PW的8到9倍。
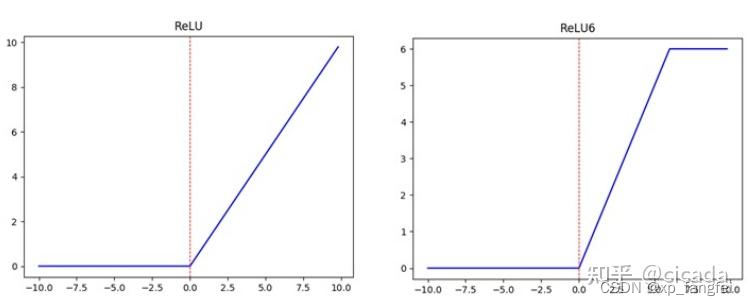
ReLU6激活函数的介绍
ReLU6就是普通的ReLU但是限制最大输出值为6(对输出值做clip),这是为了在移动端设备float16的低精度的时候,也能有很好的数值分辨率,如果对ReLU的激活范围不加限制,输出范围为0到正无穷,如果激活值非常大,分布在一个很大的范围内,则低精度的float16无法很好地精确描述如此大范围的数值,带来精度损失。
如下图所示:
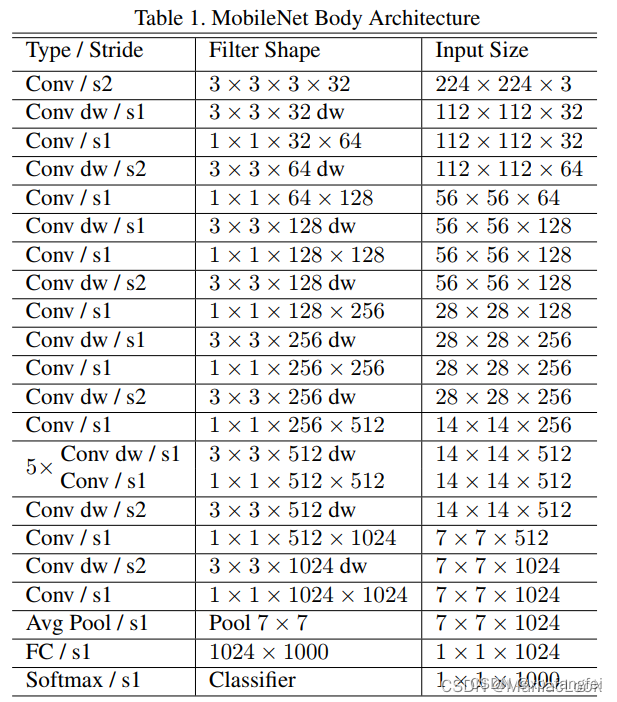
MobileNet V1网络结构
MobileNet V1程序
import torch
import torch.nn as nn
from torchinfo import summary
def conv_bn(in_channel, out_channel, stride=1):
"""
传统卷积块:conv + BN + Act
"""
return nn.Sequential(
nn.Conv2d(in_channels=in_channel, out_channels=out_channel, kernel_size=3,
stride=stride, padding=1, bias=False),
nn.BatchNorm2d(out_channel),
nn.ReLU6(inplace=True)
)
def conv_dsc(in_channel, out_channel, stride=1):
"""
深度可分离卷积:DW+PW
"""
return nn.Sequential(
nn.Conv2d(in_channels=in_channel, out_channels=in_channel,kernel_size=3,
stride=stride, padding=1, groups=in_channel, bias=False),
nn.BatchNorm2d(in_channel),
nn.ReLU6(inplace=True),
nn.Conv2d(in_channels=in_channel, out_channels=out_channel, kernel_size=1,
stride=1, padding=0, bias=False),
nn.BatchNorm2d(out_channel),
nn.ReLU6(inplace=True)
)
class MobileNetV1(nn.Module):
def __init__(self, in_channel=3, num_classes=1000):
super(MobileNetV1, self).__init__()
self.num_classes = num_classes
self.stage1 = nn.Sequential(
conv_bn(in_channel=in_channel, out_channel=32, stride=2),
conv_dsc(in_channel=32, out_channel=64, stride=1),
conv_dsc(in_channel=64, out_channel=128, stride=2),
conv_dsc(in_channel=128, out_channel=128, stride=1),
conv_dsc(in_channel=128, out_channel=256, stride=2),
conv_dsc(in_channel=256, out_channel=256, stride=1),
conv_dsc(in_channel=256, out_channel=512, stride=2)
)
self.stage2 = nn.Sequential(
conv_dsc(in_channel=512, out_channel=512, stride=1),
conv_dsc(in_channel=512, out_channel=512, stride=1),
conv_dsc(in_channel=512, out_channel=512, stride=1),
conv_dsc(in_channel=512, out_channel=512, stride=1),
conv_dsc(in_channel=512, out_channel=512, stride=1)
)
self.stage3 = nn.Sequential(
conv_dsc(in_channel=512, out_channel=1024, stride=2),
conv_dsc(in_channel=1024, out_channel=1024, stride=2)
)
self.avg1 = nn.AdaptiveAvgPool2d((1, 1))
self.fc1 = nn.Linear(1024, num_classes)
def forward(self, x):
x = self.stage1(x)
x = self.stage2(x)
x = self.stage3(x)
x = self.avg1(x)
x = x.view(-1, 1024)
x = self.fc1(x)
return x
MobileNetV2模型介绍
MobileNetV2是MobileNet的升级版,它具有一个非常重要的特点就是使用了Inverted resblock,整个mobilenetv2都由Inverted resblock组成。
Inverted residual block介绍
通道越少,卷积层的乘法计算量就越小。那么如果整个网络都是低维的通道,那么整体计算速度就会很快。然而,这样效果并不好,没有办法提取到整体的足够多的信息。所以,如果提取特征数据的话,我们可能更希望有高维的通道来做这个事情。MobileNetV2就设计这样一个结构来达到平衡。
MobileNetV2中首先扩展维度,然后用depthwise conv来提取特征,最后再压缩数据,让网络变小。
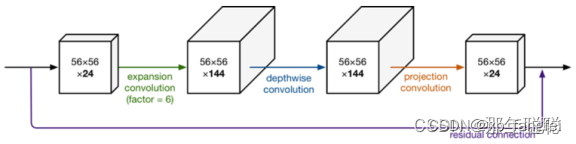
Inverted residual block可以分为两个部分:主要包括Expansion layer,Depthwise Convolution,Projection layer。
Expansion layer表示扩展层,使用1x1卷积,目的是将低维空间映射到高维空间(升维)。
Projection layer表示投影层,使用1x1卷积,目的是把高维特征映射到低维空间去(降维)。
Depthwise Convolution表示深度可分离卷积,完成卷积功能,降低计算量、参数量。
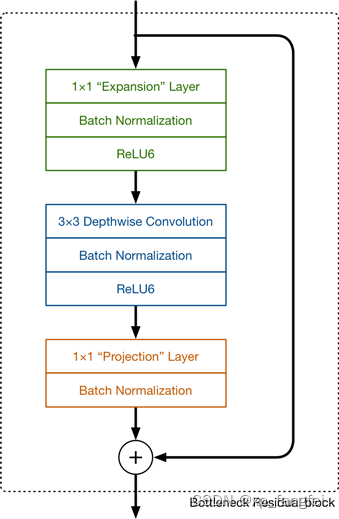
Inverted residual block 和 residual block的区别
1、结构的不同如下图
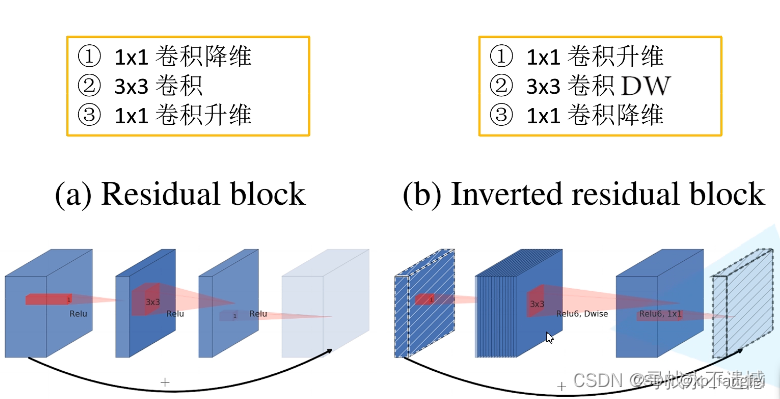
2、激活函数的不同:Inverted residual block中使用的是ReLu6;residual block中使用的是ReLu。
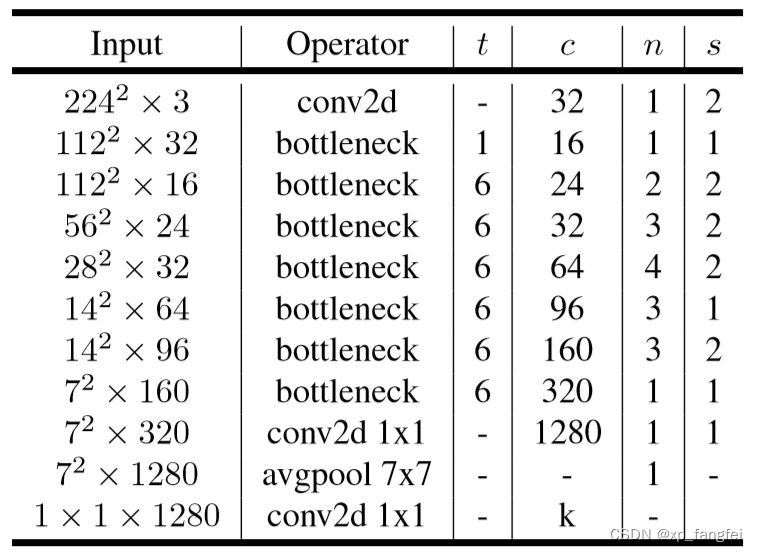
MobileNetV2网络结构
MobileNetV2程序
import torch
import torch.nn as nn
from torchinfo import summary
import torchvision.models.mobilenetv2
# ------------------------------------------------------#
# 这个函数的目的是确保Channel个数能被8整除。
# 很多嵌入式设备做优化时都采用这个准则
# ------------------------------------------------------#
def _make_divisible(v, divisor, min_value=None):
if min_value is None:
min_value = divisor
new_v = max(min_value, int(v + divisor / 2) // divisor * divisor)
if new_v < 0.9 * v:
new_v += divisor
return new_v
# -------------------------------------------------------------#
# Conv+BN+ReLU经常会用到,组在一起
# 参数顺序:输入通道数,输出通道数...
# 最后的groups参数:groups=1时,普通卷积;
# groups=输入通道数in_planes时,DW卷积=深度可分离卷积
# pytorch官方继承自nn.sequential,想用它的预训练权重,就得听它的
# -------------------------------------------------------------#
class ConvBNReLU(nn.Sequential):
def __init__(self, in_planes, out_planes, kernel_size=3, stride=1, groups=1):
padding = (kernel_size - 1) // 2
super(ConvBNReLU, self).__init__(
nn.Conv2d(in_planes, out_planes, kernel_size, stride, padding, groups=groups, bias=False),
nn.BatchNorm2d(out_planes),
nn.ReLU6(inplace=True)
)
# ------------------------------------------------------#
# InvertedResidual,先升维后降维
# 参数顺序:输入通道数,输出通道数,步长,变胖倍数(扩展因子)
# ------------------------------------------------------#
class InvertedResidual(nn.Module):
def __init__(self, inp, oup, stride, expand_ratio):
super(InvertedResidual, self).__init__()
self.stride = stride
assert stride in [1, 2]
hidden_dim = int(round(inp * expand_ratio))
self.use_res_connect = self.stride == 1 and inp == oup
layers = []
if expand_ratio != 1:
layers.append(ConvBNReLU(inp, hidden_dim, kernel_size=1))
layers.extend([
ConvBNReLU(hidden_dim, hidden_dim, stride=stride, groups=hidden_dim),
nn.Conv2d(hidden_dim, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
])
self.conv = nn.Sequential(*layers)
def forward(self, x):
if self.use_res_connect:
return x + self.conv(x)
else:
return self.conv(x)
class MobileNetV2(nn.Module):
def __init__(self, num_classes=1000, width_mult=1.0, inverted_residual_setting=None, round_nearest=8):
super(MobileNetV2, self).__init__()
block = InvertedResidual
input_channel = 32
last_channel = 1280
if inverted_residual_setting is None:
inverted_residual_setting = [
# t表示扩展因子(变胖倍数);c是通道数;n是block重复几次;
# s:stride步长,只针对第一层,其它s都等于1
[1, 16, 1, 1],
[6, 24, 2, 2],
[6, 32, 3, 2],
[6, 64, 4, 2],
[6, 96, 3, 1],
[6, 160, 3, 2],
[6, 320, 1, 1],
]
if len(inverted_residual_setting) == 0 or len(inverted_residual_setting[0]) != 4:
raise ValueError("inverted_residual_setting should be non-empty "
"or a 4-element list, got {}".format(inverted_residual_setting))
input_channel = _make_divisible(input_channel * width_mult, round_nearest)
self.last_channel = _make_divisible(last_channel * max(1.0, width_mult), round_nearest)
features = [ConvBNReLU(3, input_channel, stride=2)]
for t, c, n, s in inverted_residual_setting:
output_channel = _make_divisible(c * width_mult, round_nearest)
for i in range(n):
stride = s if i == 0 else 1
features.append(block(input_channel, output_channel, stride, expand_ratio=t))
input_channel = output_channel
features.append(ConvBNReLU(input_channel, self.last_channel, kernel_size=1))
self.features = nn.Sequential(*features)
self.classifier = nn.Sequential(
nn.Dropout(0.2),
nn.Linear(self.last_channel, num_classes),
)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out')
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, nn.BatchNorm2d):
nn.init.ones_(m.weight)
nn.init.zeros_(m.bias)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
nn.init.zeros_(m.bias)
def forward(self, x):
x = self.features(x)
x = x.mean([2, 3])
x = self.classifier(x)
return x
model = MobileNetV2()
summary(model)
如果有错误欢迎指正,如果帮到您请点赞加收藏哦!

















 1041
1041











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











