




 文章介绍了一种专为结构化环境设计的RGB-DSLAM系统,通过结合点、线和平面特征,采用基于曼哈顿世界的解耦姿态估计和高效的网格重建方法,实现高精度定位和映射。实验证明在公共基准上性能优于先进方法。
文章介绍了一种专为结构化环境设计的RGB-DSLAM系统,通过结合点、线和平面特征,采用基于曼哈顿世界的解耦姿态估计和高效的网格重建方法,实现高精度定位和映射。实验证明在公共基准上性能优于先进方法。
摘要
本文提出了一种专门为结构化环境设计的RGB-D SLAM系统,旨在通过从周围提取的几何特征来提高跟踪和制图精度。除了点之外,结构化环境还提供了大量的几何特征,如线和平面,我们利用这些特征来设计SLAM系统的跟踪和映射组件。对于跟踪部分,我们基于曼哈顿世界(MW)的假设探索这些特征之间的几何关系。我们提出了一种基于点、线和面的解耦优化方法,以及在附加的姿态优化模块中使用曼哈顿关系。在建图部分,以较低的计算成本重建了从稀疏到密集的不同层次的建图。提出了一种基于实例的网格划分策略,通过独立划分平面实例来构建密集映射。姿态估计和重建方面的整体性能在公共基准上进行了评估,与最先进的方法相比,性能有所提高。
开源:https://github.com/yanyan-li/PlanarSLAM
论文地址:2010.07997.pdf (arxiv.org)
一、引言
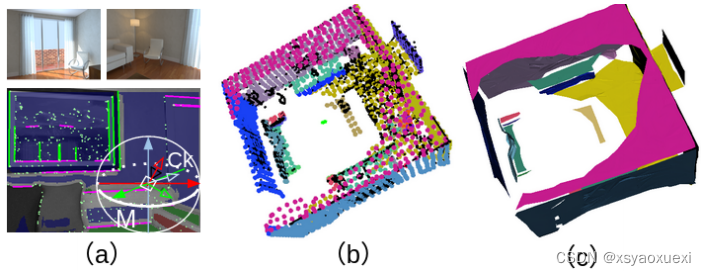
图1:RGB-D SLAM系统。(a)典型结构化场景示例,2D特征及正交线、面分割。(b)点云,包括点、线、面。(c) CPU上的实时网格。
在本文中,我们以我们的单目StructureSLAM为基础,提出了一个专为处理结构化环境而设计的鲁棒RGB-D SLAM系统,同时改进了跟踪和映射。图1展示了这种结构化场景的组成部分,包括点、线和平面段。根据Structure-SLAM的解耦策略,首先估计无漂移旋转矩阵,然后估计三自由度平移矩阵。
初始旋转和平移通过map-to - frame策略进行细化。与[1],[11],[12]不同的是,我们将平面特征合并到基于Manhattan的框架中,该框架用于估计初始平移向量,并在精化模块中保留Manhattan关系作为约束。在此基础上,提出了一种高效的网格划分模块,基于稀疏映射中得到的平面区域重构场景结构。
总之,我们的贡献是:
(1)基于基于mw的解耦姿态估计的概念,我们通过将点和线特征与平面相结合以及与曼哈顿关系相结合的额外姿态优化步骤来改进平移估计.
(2)我们提出了一种基于平面实例的网格重建方法,从稀疏的点云生成紧凑的环境表示。
(3)实时RGB-D SLAM的通用框架,其中这些组件用于在结构化环境下高精度地进行定位和映射。
三、所提出的框架
给定来自结构化环境的RGB-D帧序列,我们的方法的目标是重建3D场景,同时估计每帧的6D相机姿势。
A.扩展特征集
在我们的方法中,我们使用ORB特征[27],它可以快速提取和匹配。在低纹理环境中,很难提取足够的点来进行鲁棒姿态估计,因此我们使用LSD[28]方法提取的线条扩展特征集,如LBD[29]所述。此外,在室内环境中发现非纹理平面区域是很常见的,其中从深度图中提取的平面实例是扩展点和线的有价值的线索。平面检测采用连通分量分析法[30]。用海森标准范式![]() ,其中
,其中
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2226
2226

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









