







ROS的官方网站为http://wiki.ros.org/
rosdep使用的地址 sudo gedit /etc/hosts
185.199.108.133 raw.githubusercontent.com
185.199.109.133 raw.githubusercontent.com
185.199.110.133 raw.githubusercontent.com
185.199.111.133 raw.githubusercontent.com
常用命令
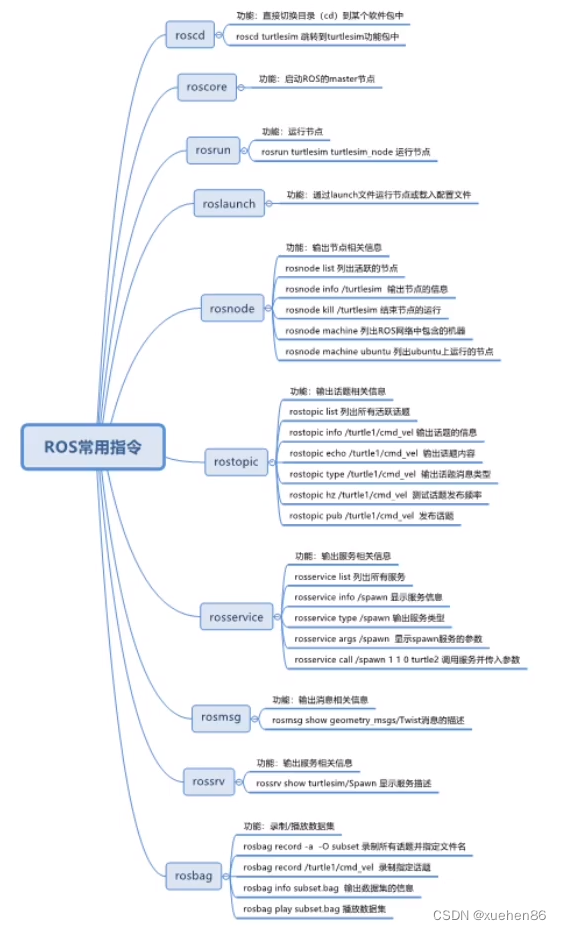
roscore 启动主节点master
rosrun turtlesim turtlesim_node 启动小乌龟视图
rosrun turtlesim turtle_teleop_key 启动小乌龟键盘控制
ros info 显示节点信息
rostopic 话题列表
rostopic pub
图形化工具
rosrun rqt 显示列表
rqt_graph 显示节点和节点之间的关系
rqt_plot 曲线绘图工具
rqt_image_view 查看图像
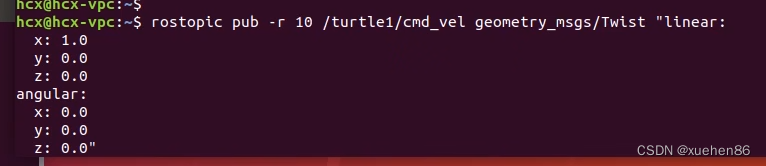
roslaunch 可以启动节点(会自动检查master) -r是频率 10赫兹 1秒10次 linear线移动 angular角移动 调节z转圈
展示数据结构

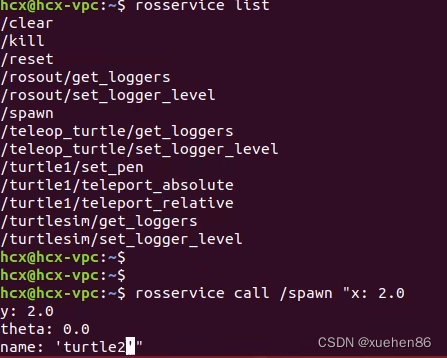
服务名称和列表,spawn是产生新的海龟
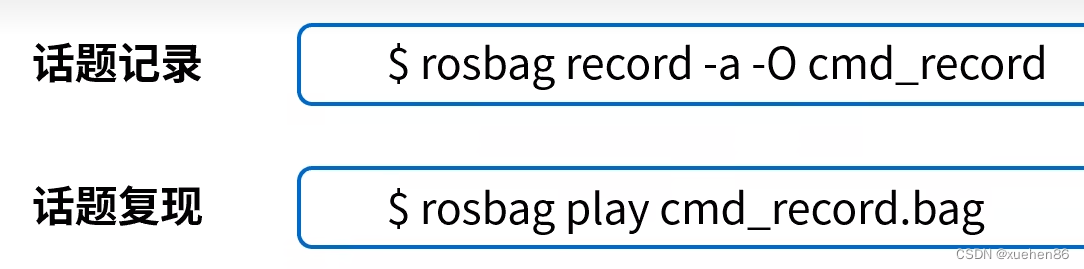
record开始保存记录名字为cmd——record
坐标系和tf
右手坐标系
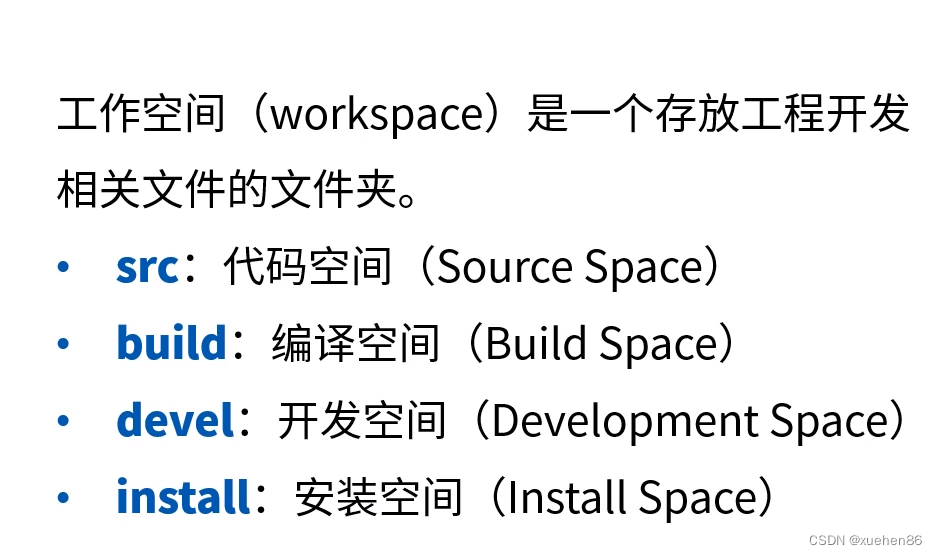
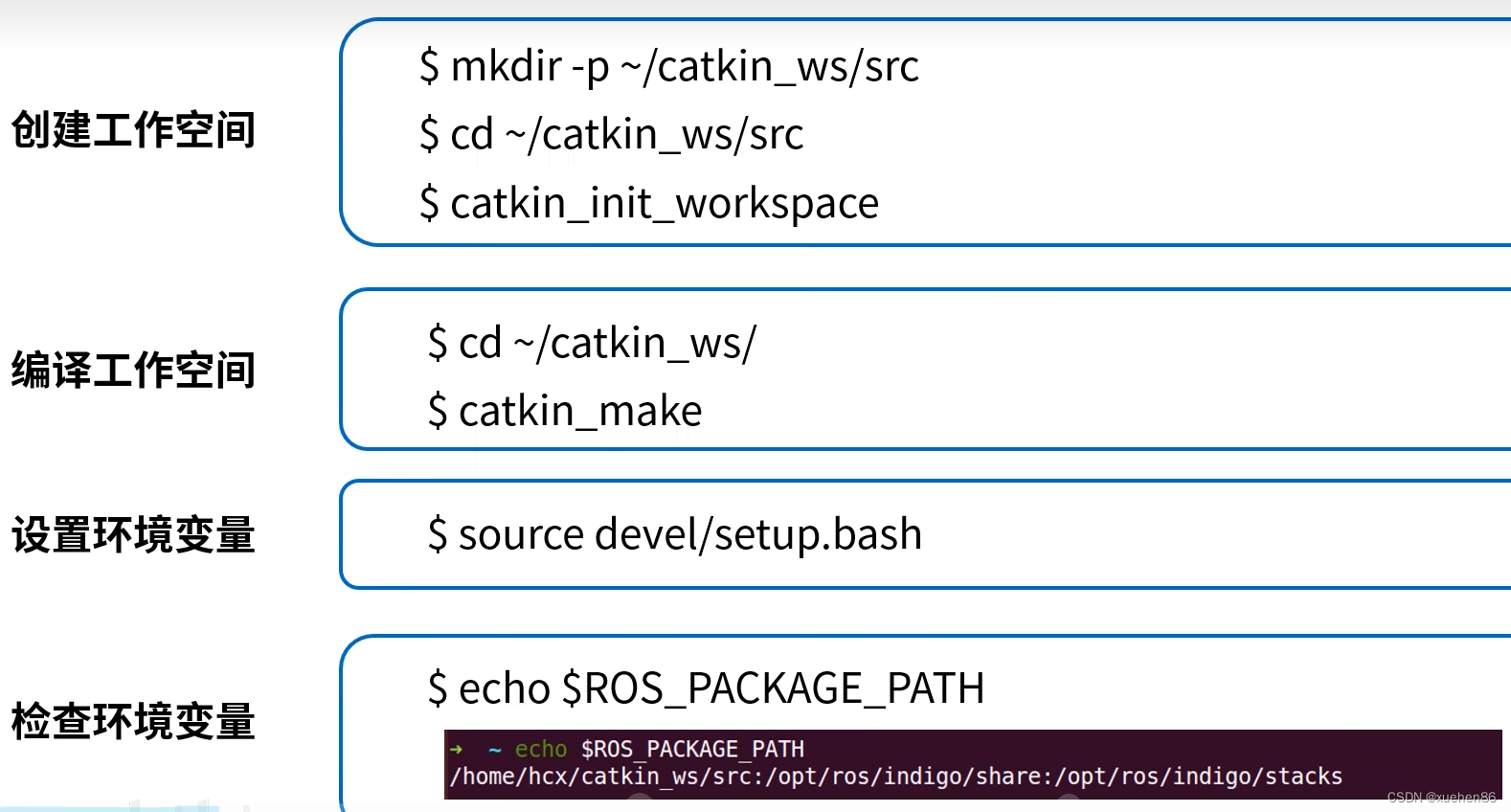
ROS的工作空间和编译
mkdir catkin_ws 创建工作空间
cd
mkdir src 创建个文件夹
catkin make 编译空间
下载功能包至src
catkin_make 必须在工作空间主目录下编译
在.bash文件中添加 source /home/…/
source .bashrc
















 1422
1422











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









