







一、调节机器人半径
1.方法一
在teb_local_planner_params.yaml里,原本没有radius: 0.36的代码,可以进行添加。

2.方法二
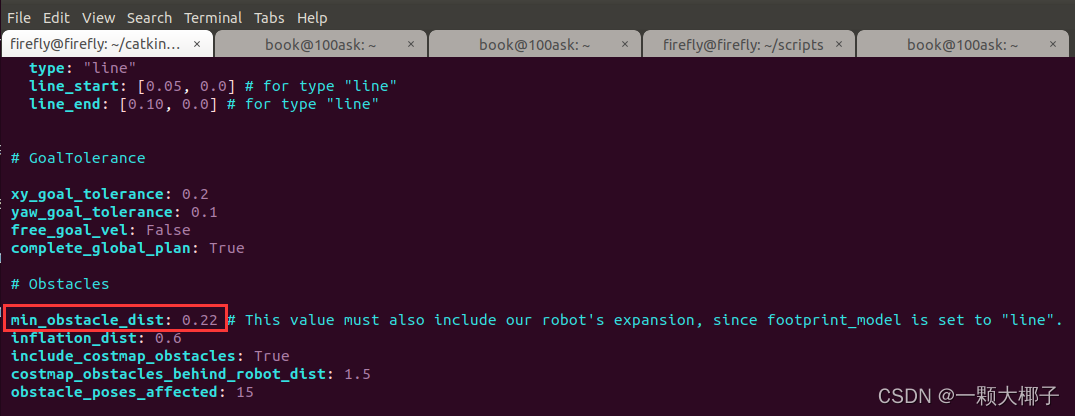
在看了一些文档后,发现min_obstacle_dist这个值是设置机器人中心离障碍物的最小距离,用这个可以替代机器人半径。
而且若设置了车辆的轮廓,则不建议使用此参数
二、禁止机器人倒退
仔细阅读参数手册后只找到红框内的weight_kinematics_forward_drive参数,是强制机器人仅选择正向(正的平移速度)的优化权重,并未找到有禁止倒退的参数。
weight_kinematics_forward_drive越大,代表机器人正向运动的概率越大。

三、结论
使用teb局部路径规划算法时,调节机器人半径可以实现,但是不可能阻止teb算法使得机器人倒退,如果机器人没有正向的解决方案时,必然会倒退。
注:
1.未经许可请勿转载















 205
205











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









