







一、方法一:修改调用参数
1.在ROS功能中,找到设置调用全局规划路径算法的yaml文件
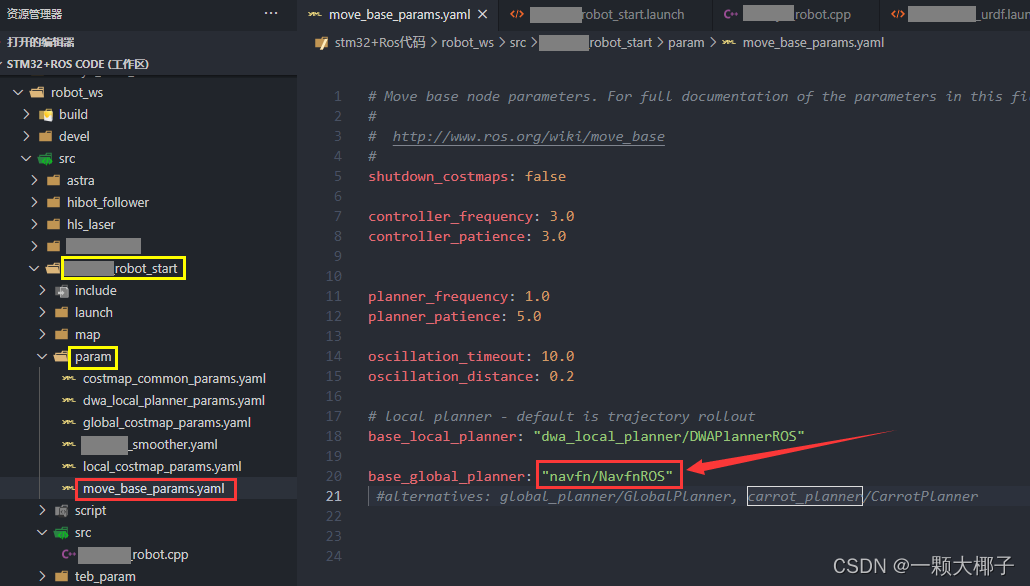
2.如图我的机器人中,设置全局路径规划算法的yaml文件是move_base_params.yaml
3.将文件中的base_global_planner: "navfn/NavfnROS"改为base_global_planner: "global_planner/GlobalPlanner"
4.修改完后需要将编译好的devel文件删除,然后使用catkin_make命令重新编译生成新的devel文件。不然有可能对于全局路径算法的修改不生效。
二、方法二(推荐):修改源码
1.在navigation元功能包中找到global_planner功能包,进而找到其中planner_core.cpp文件。
2.如图所示红框内的代码,大概在116行左右,将这行代码的true改为false。

3.修改完后需要将编译好的devel文件删除,然后使用catkin_make命令重新编译生成新的devel文件。不然有可能对于全局路径算法的修改不生效。
4.本人使用此方法时,可能会出现问题:
全局路径有时候可以规划成功,有时候不能规划成功,而且频繁发出警告。
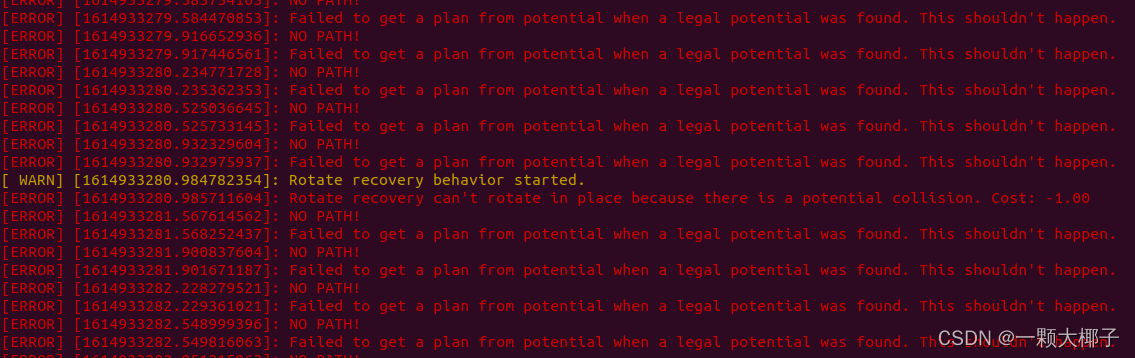
主要重复的问题代码为
[ERROR] [1614933280.932329604]: NO PATH!
[ERROR] [1614933280.932975937]: Failed to get a plan from potential when a legal potential was found. This shouldn't happen.
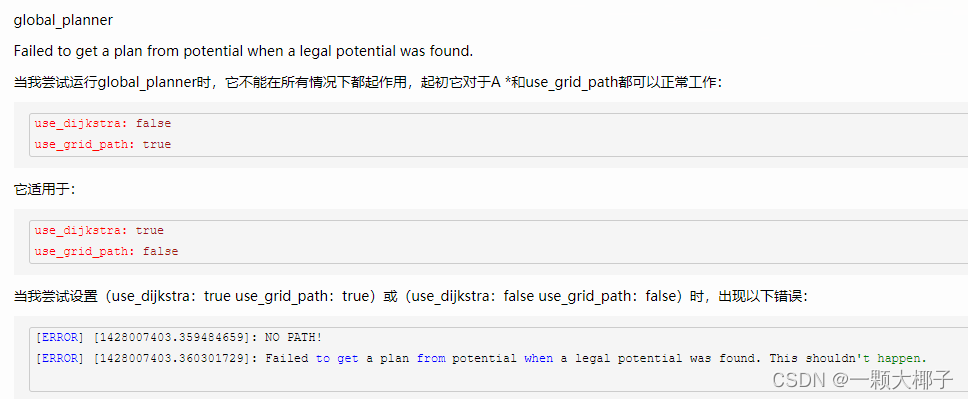
5.尝试解决报错
经过网上查找,发现此方法并无作用
三、方法三(推荐):修改源码
1.找到planner_core.cpp文件中的initialize函数
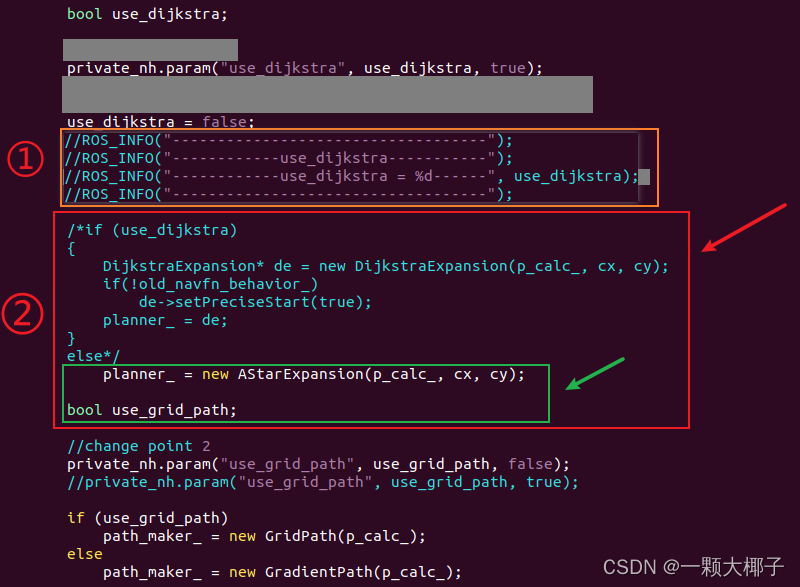
2.注释掉使用Dijkstra的部分,就可以使用A*算法了。
具体操作:将②部分红框内if的上半部分代码全部注释掉,剩下绿框内的代码。
3.①部分红框内的代码可以用打印信息验证是否使用的是dikstra全局路径算法,如果不是则使用的是A*算法
4.修改完后需要将编译好的devel文件删除,然后使用catkin_make命令重新编译生成新的devel文件。不然有可能对于全局路径算法的修改不生效。
注:
1.未经许可请勿转载
2.部分内容参考 link1















 4568
4568











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









