







 博主发起了一项AutoSAR知识结构的思维导图计划,旨在通过社区力量完善和细化该图,目前处于初期阶段,期待大家的反馈和贡献,最终目标是创建一个详尽的AutoSAR理论结构图。
博主发起了一项AutoSAR知识结构的思维导图计划,旨在通过社区力量完善和细化该图,目前处于初期阶段,期待大家的反馈和贡献,最终目标是创建一个详尽的AutoSAR理论结构图。
AutoSAR系列讲解 - 思维导图计划
思维导图计划
->返回总目录<-
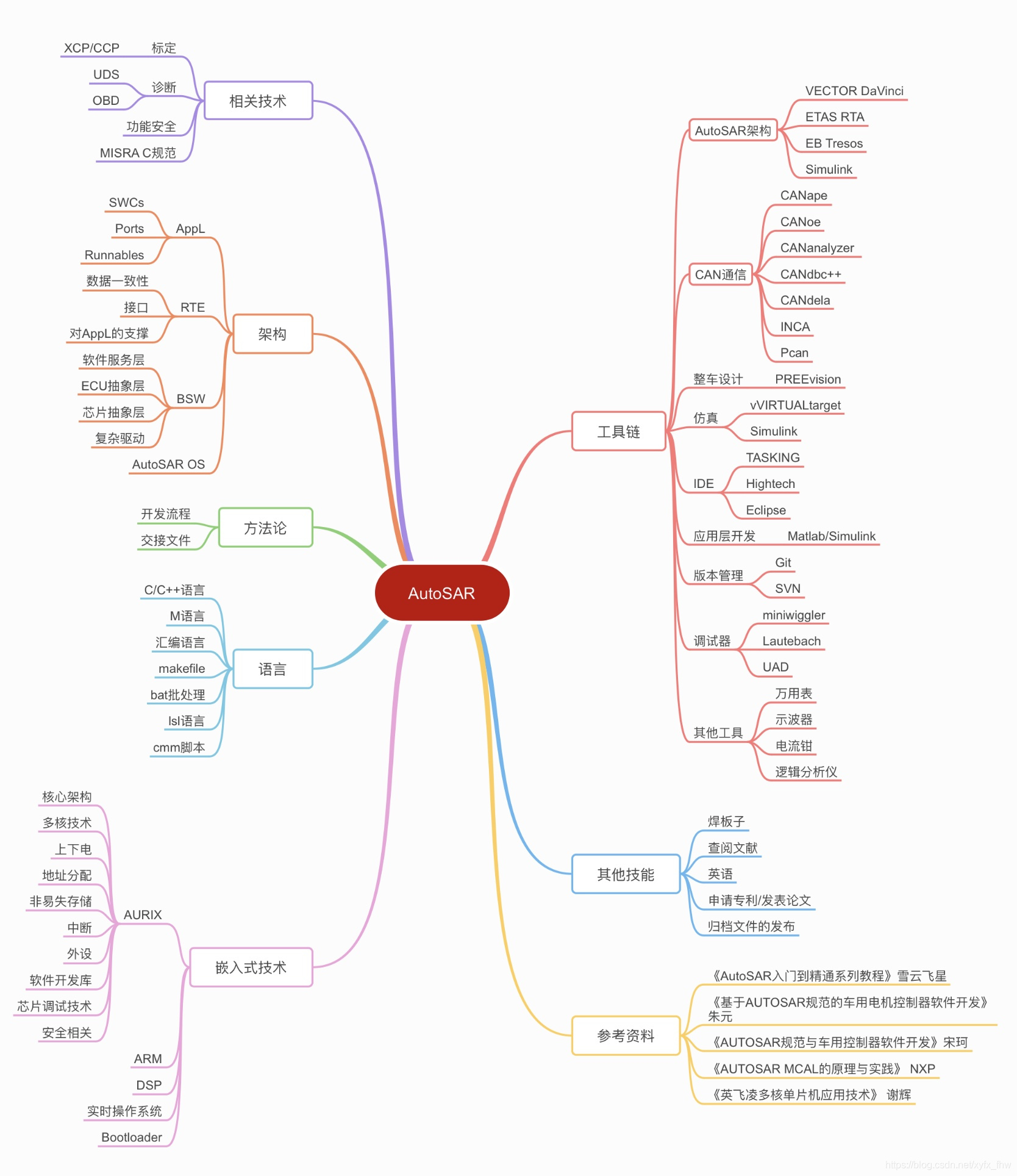
博主依据自己做过的项目,稍微整理了一下,出了一张AutoSAR知识结构的思维导图,目前还只是一个比较简陋的版本(比如NXP博主没有用过,就没有写在上面)。博主希望能通过大家的力量,将这张图变得详细和完整,目前大家先留言,博主收集大家的意见,改进其主要结构。后续会通过git放到网上,大家可以随时copy工程来修改其内容,然后推送给我进行不断完善,为咱们AutoSAR开发者提供一个正确的前进方向。
- 终极目标: 能够建立起一张比较完整的AutoSAR知识理论结构图,做到很细节的程度,当然这还只是一个计划,后面的建设还需要各位的帮助,大家一起加油!
附:返回总目录的传送门如下
->返回总目录<-


















 85
85

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











