








 超级会员免费看
超级会员免费看


【翻译论文】Supervised spatial classification of multispectral LiDAR data in urban areas(2018)
城市地区多光谱激光雷达数据的监督空间分类
Lian-Zhi,Huo,Carlos
DOI:10.1371/journal.pone.0206185
文章目录
摘要:
多光谱 LiDAR(光探测和测距)数据最初被用于土地覆盖分类。然而,仍然存在很高的分类不确定性,特别是在城市地区,物体经常混杂在一起。本研究调查了将先进的统计方法与源自多光谱 LiDAR 数据的 LiDAR 指标相结合以提高城市地区土地覆盖分类精度的效率。研究区位于加拿大安大略省奥沙瓦的安大略湖海岸线上。研究区域的多光谱 Optech Titan LiDAR 数据于 2014 年 9 月 3 日在 3 平方公里的单条带中获得。使用 1,550 nm (C1)、1,064 nm (C2) 和 532 nm (C3) 的通道、LiDAR 强度数据、归一化数字表面模型 (nDSM)、伪归一化差异植被指数 (PseudoNDVI)、形态剖面 (MP) 和一种新的分层形态学特征(HMP)被导出并用作分类的特征。在分类阶段应用了具有径向基函数(RBF)内核的支持向量机分类器,其中分类器的最佳参数通过网格搜索程序选择。强度、pseudoNDVI、nDSM 和 HMP 的组合产生了最佳的土地覆盖分类,总体准确率为 93.28%。
一、介绍
城市土地覆盖图对于城市土地管理和规划非常重要[1,2]。遥感技术具有快速的重现期和较大的覆盖范围,为更好地了解城市土地覆盖提供了主要的源数据[3]。为了充分利用这些数据,土地覆盖图通常是基于视觉解释或自动分类方法得出的[4]。
区域和全球城市区域主要通过绘制不透水表面区域图进行监测,这些区域具有人为特征,水不能通过这些特征渗入土壤(例如道路、停车场和屋顶)[5]。各种卫星传感器对不透水表面区域进行了监测,例如国防气象卫星计划(DMSP)的运行线扫描系统(OLS),该系统对夜间光线[6]、250–1000米中分辨率成像光谱仪(MODIS)图像[3,7]和30米陆地卫星图像[8,9]进行成像。尽管这些图像类型的粗略到中等空间分辨率描述了城市区域的空间范围,但它们通常无法解析城市区域内子类型(例如建筑物、道路和树木)的范围和空间排列。
高空间分辨率图像(例如IKONOS和QuickBird)提供了新的机会,通过提供更详细的地球观测,以精细的比例绘制详细的城市区域地图[10,11]。尽管如此,由于复杂地理空间物体的光谱异质性和结构多样性,城市土地覆盖分类仍然是一项具有挑战性的任务[12]。通过关注基于对象的图像分析[13–15]提取空间特征[16,17],甚至基于场景的图像分析方法[18],已经做出了大量努力来提高图像分类效率。然而,阴影和起伏位移的影响仍然带来了相当大的挑战[19]。因此,在过去十年中,对机载激光雷达(即光探测和测距)数据等主动传感器进行了研究,用于城市地区的土地覆盖分类[20]。
机载激光雷达通过收集激光距离测量云来提供测量区域的三维坐标[20]。基于三维点云,激光雷达可以进一步插值到表面的光栅层中,例如数字表面模型(DSM)和强度数据[21]。为了充分利用激光雷达数据进行土地覆盖分类,提出了几组方法[20,22–26]。第一类方法直接使用激光雷达点云,例如,激光雷达点云可以直接用于城市特征提取[23];或者,可以基于最佳邻域选择执行语义点云解释[24]。第二类方法主要依赖于激光雷达点衍生产品、强度图像[25]或强度和DSM图像(即高度信息)[26]。周所做的研究[26]表明,光是激光雷达数据(通过结合强度和DSM数据)就可能有助于准确绘制城市土地覆盖图。另一类流行的方法采用了将激光雷达数据与光学图像(例如,多光谱或高光谱图像)相结合的策略,用于详细的城市土地覆盖图[22,25,27,28];DSM数据补充了被动光学图像的多光谱信息,以识别不同的土地覆盖类型。用于城市土地覆盖制图的激光雷达数据调查见[20]。
然而,由于数据可用性有限,以往利用激光雷达进行城市土地覆盖制图的大多数研究都使用单波段激光雷达。由于激光雷达的后向散射能量取决于目标材料、目标粗糙度和激光波长[29],因此单波段激光雷达区分土地覆盖类型的能力有限。因此,多光谱激光雷达在绘制城市土地覆盖类型方面具有更大的潜力。新的多光谱激光雷达数据传感器(例如,多光谱Optech Titan激光雷达)测量不同波长的后向散射能量,为有效分类城市土地覆盖提供了新的机会[30]。自第一个商用机载多光谱激光雷达系统发布以来,已经进行了几项研究,以评估生成更准确土地覆盖图的能力[29-32,33-37]。例如,Teo等人证明,在土地覆盖分类方面,多波长激光雷达可以提供比单波长激光雷达更高的精度[29]。Bakula等人[35]在六级土地覆盖分类中应用了最大似然分类器,总体精度达到90%。最大似然分类器也被用于对强度和高度图像进行分类,作者发现高度信息对城市土地覆盖制图非常重要[34]。Fernandez Diaz等人[36]评估了Titan多光谱激光雷达在土地覆盖分类、水深测绘和树冠特征描述方面的能力。Zou等人[37]采用了基于对象的方法,发现从多光谱激光雷达计算的伪归一化差异植被指数(伪NDVI)可以提高植被识别。在另一项研究[33]中,还对用于芬兰土地覆盖分类和地图更新的多光谱机载激光雷达数据进行了基于对象的分析。
受之前研究[29,33–37]的启发,这项研究专注于多光谱激光雷达强度光栅的分类,sinceraster格式是一种比点云更方便的土地覆盖制图格式。之前的研究表明,多光谱激光雷达在土地覆盖分类方面的性能优于单波段激光雷达[29],并发现伪NDVI[37,38]和DSM[34,35]有助于提高多光谱激光雷达数据的分类精度。本研究的创新之处在于,我们研究了空间信息在利用多光谱激光雷达强度数据(即光谱空间分类[39])改进城市土地覆盖分类结果中的作用。
光谱空间分类旨在通过组合多光谱或高光谱数据中包含的空间信息来提高分类精度[39],从而生成更精确的分类图[40]。通过一系列丰富的算法开发[39,41–43]对其进行了广泛研究,尤其是在高光谱图像分析中。在这些方法中,形态剖面(MP)表现良好,因为它们能够捕捉不同土地覆盖类型之间的空间关系[41,42]。在数学形态学[44]中,两个基本算子是侵蚀和膨胀,它们被应用于具有一组已知形状的图像,称为结构元素(SE)。侵蚀和膨胀的不同组合构成了打开和关闭操作,这是MP的组成部分。在功能上,打开操作可以移除小于结构元素的对象,而关闭操作可以填充小孔并连接相邻对象。传统的主成分分析方法是对多光谱或高光谱图像的特征图像(主要是第一个或前几个主成分)进行处理。基本上,假设图像数据在相同的垂直水平上执行;i、 例如,形态学操作仅考虑其空间邻域像素,而缺乏考虑其邻域像素是否明显属于另一土地覆盖类别的能力(例如,与草像素相邻的树像素的打开和关闭操作将对这些草像素施加影响)。然而,激光雷达衍生的nDSM提供了图像的垂直背景,从而提供了在提取MP特征时引入垂直背景的机会。为了充分利用nDSM数据,提出了一种新的层次形态轮廓(HMP)特征。因此,本研究的具体目标如下:(1)评估MP对改进多光谱激光雷达数据分类的有用性;(2)进一步研究建议HMP的有效性。
二、材料和方法
2.1 研究区域描述
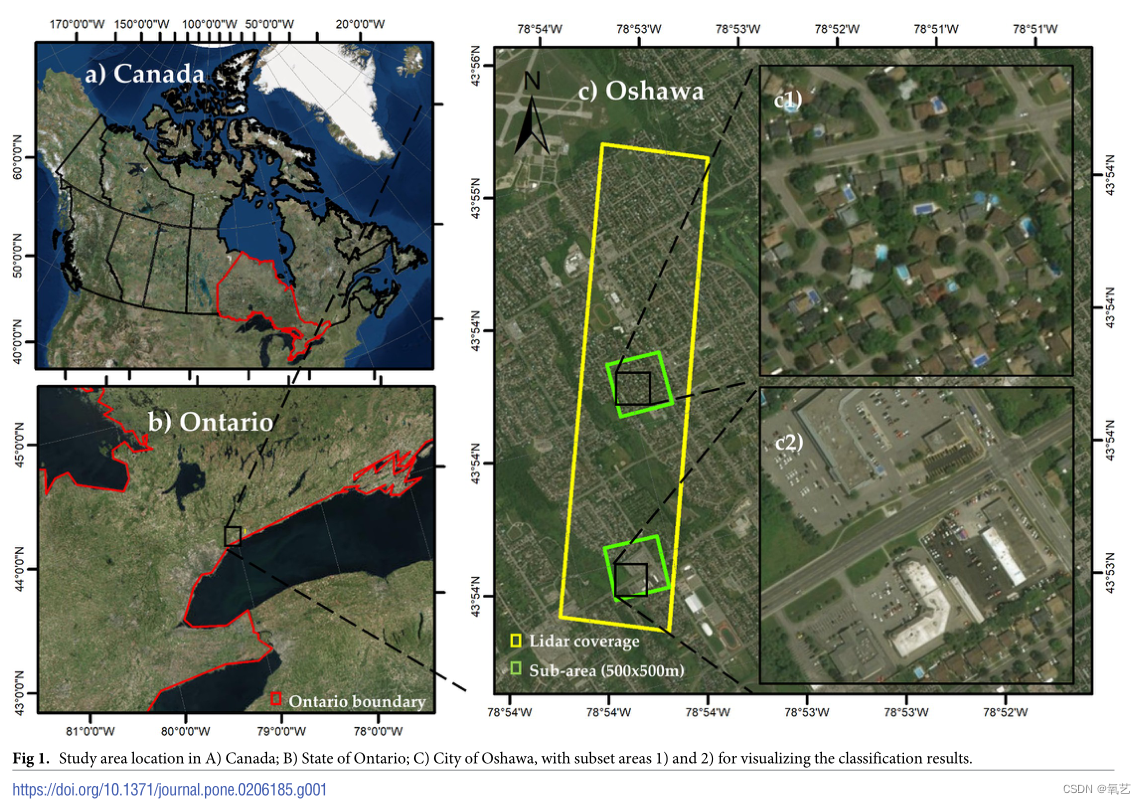
研究区域位于加拿大安大略省奥沙瓦,安大略湖海岸线上(见图1)。奥沙瓦位于安大略省南部,多伦多以东约60公里。它是达勒姆自治区最大的城市,通常被视为大多伦多地区的东部支柱。Oshawa是一个典型的城市地区,植被、建筑、道路和其他人造特征的空间组合非常复杂。该市人口密度为1027.0人/km2。该地区的气候为湿润大陆性气候(Ko–ppen气候分类Dfb)。平坦地形的平均海拔为106米,便于城市向北和向西扩展。
2.2 多光谱激光雷达数据采集与预处理
2014年9月3日,在研究区域内的一条3平方公里的狭长地带内获得了多光谱Optech Titan激光雷达数据[38,45–47]。该系统在1550 nm(C1)、1064 nm(C2)和532 nm(C3)处使用三个独立的主动成像通道。数据于2014年9月3日在研究区域内3平方公里的单一地带获得[38,45–47]。该系统在1550 nm(C1)、1064 nm(C2)和532 nm(C3)处使用三个独立的主动成像通道。在优化系统几何特性的条件下,在地面1075米处以±20˚的扫描角、200 kHz/通道脉冲重复频率和40 Hz扫描频率运行时,采集数据[45,46]。对点云进行几何注册,并导出包含xyz坐标、原始强度值、扫描角度和每个激光雷达点的GPS时间的LAS文件。
在最近一项使用多光谱Optech Titan激光雷达数据对芬兰南部海岸赫尔辛基附近的埃斯波市进行土地覆盖分类的研究中,作者发现整个研究区域的强度值并不稳定[33]。在我们的研究中,我们还观察到,强度值在飞行路线中间最高,并且随着与扫描仪的距离增加而减小。因此,为了纠正这种影响,我们使用了[48]提出的相对辐射定标方法,如下所示:

其中icorr是校正后的强度,i是原始强度,Ri是从扫描仪到扫描点的距离,Rref是飞行高度(1075 m)。
对激光雷达强度数据进行辐射定标后,使用lastools[49]将激光雷达点云标准化为地上高度,并衍生出三种产品,用于土地覆盖分类:
①平均强度(IMEAN):我们使用Lastools中的Lascaopy工具计算了整个区域网格单元分辨率为1m时每个通道的平均强度[49]。
②伪归一化差异植被指数(伪NDVI)[38]:

其中,IMEAN C2和IMEAN C3分别是通道2和通道3中产生的平均强度。
③归一化数字地表模型(nDSM):基于三个通道组合的3D点云,使用FUSION/LDV中的canopymodel工具计算整个研究区域的1m nDSM[50]。
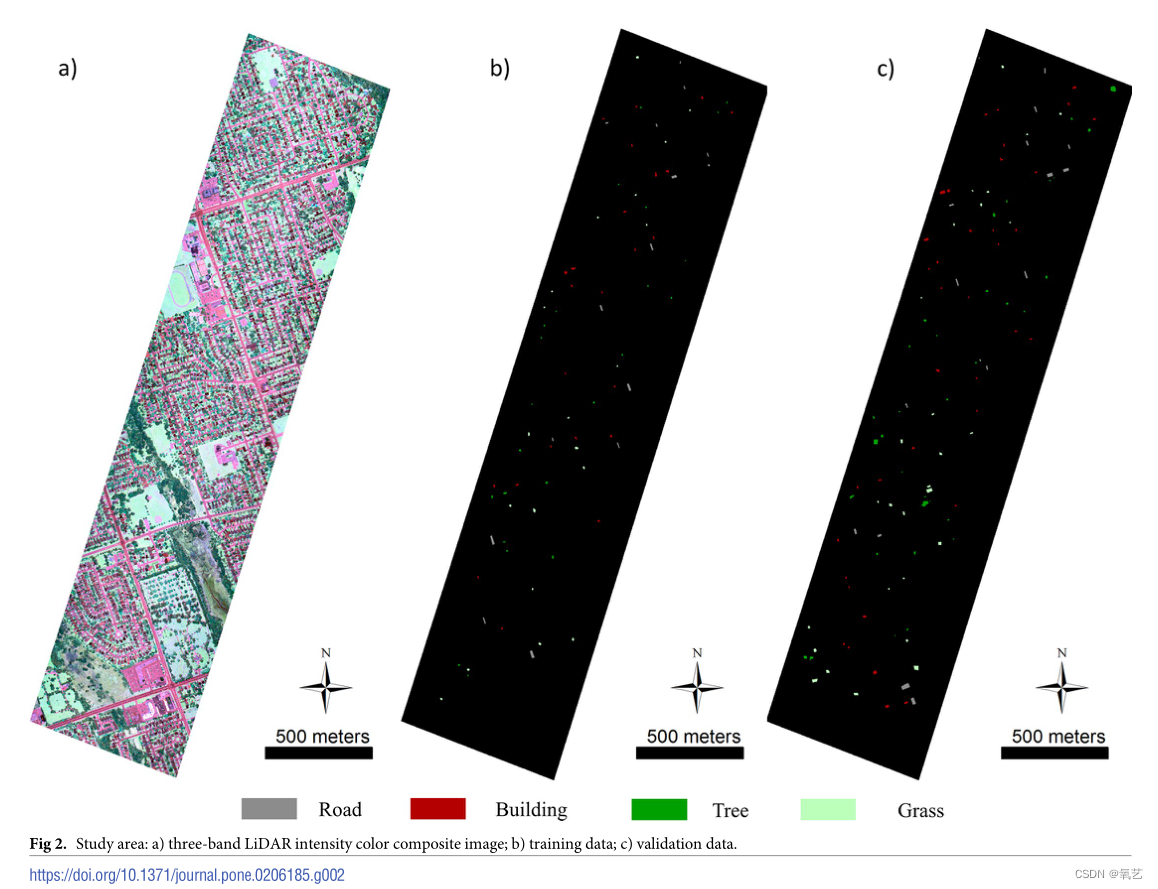
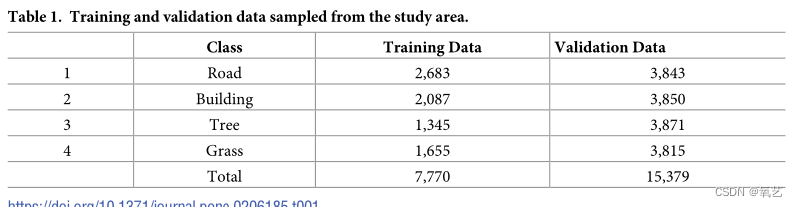
根据强度图像手动定义四个主要类别,并使用谷歌地球高分辨率图像进行检查,包括:建筑、草地、道路(包括停车场)和树木,这是城市和郊区最典型的土地覆盖类型[25,34]。三波段激光雷达衍生的彩色合成图像(C3、C2和C1 IMEAN波段分别用作红色、绿色和蓝色)以及研究区域的相应训练和验证样本如图2所示,表1给出了每个类别的更详细样本大小。
三、层次形态轮廓
在此,我们首先简要介绍了形态轮廓(MP)[44],然后提出了新的层次形态轮廓(HMP)。
MP由开始轮廓(OP)和结束轮廓(CP)组成。图像IM中像素x处的OP被定义为n维向量

where gðiÞ R is the opening by reconstruction with a SE of size i, and n is the total number of openings. The CP is defined as an n-dimensional vector:

式中,gðiÞR是通过尺寸为i的SE重建的开口,n是开口总数。CP被定义为一个n维向量:

where ;ðiÞ R is the closing by reconstruction with a SE of size i. We set CP0(x) = OP0(x) = IM(x), and the MP of an image I is defined as a 2n+1 –dimensional vector

哪里ðiÞR是用大小为i的SE重建的闭合。我们设置CP0(x)=OP0(x)=IM(x),图像i的MP被定义为2n+1维向量

HMP的工作方式如下:nDSM数据根据不同高度划分为m层;根据图像所属的nDSM层,将图像进一步分割为m层;提取每个分层图像的MP特征;连接提取的MP特征,生成HMP。通过这种方式,提取的HMP旨在在不同的垂直层中执行形态学操作。
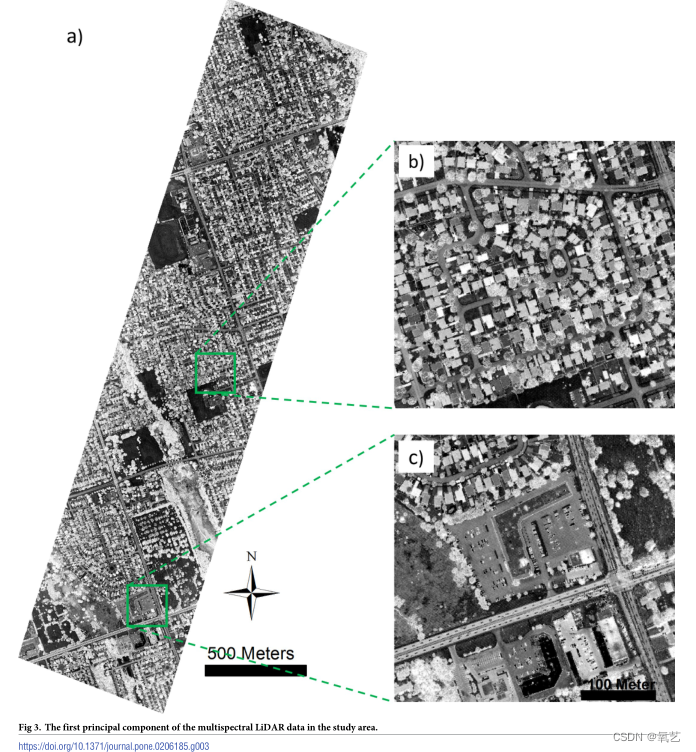
根据训练样本的高度分布(即来自nDSM数据),定义了3个(即m=3)高度层:1层:0米=<高度<3米;第二层:3米=<高度<8米;第三层:高度>=8米。我们对三波段强度图像进行主成分分析,得出第一个主成分(PC)(如图3所示),并使用第一个PC作为特征图像来提取MP,根据经验将两个圆盘形状SE设置为2和4的大小,得出一个5维MP特征;根据高度层将第一台PC进一步分割为三幅图像,分别提取MP特征并连接成15维HMP特征。
三、建模过程
有几种方法可以在分类任务中组合不同的特征,例如复合核[51]和多核学习方法[52]。然而,叠加向量法是利用多个特征的直接且最简单的方法。由于主要目的是研究空间特征在多光谱激光雷达强度图像分类中的有用性,因此采用直接叠加矢量方法来融合不同的特征。
支持向量机分类器(使用LIBSVM软件包[53])被用作基础分类器,因为它在遥感图像分类中具有良好的性能[54]。为了单独测试MP和HMP特征的有效性,以及以与其他特征相结合的方式测试以下模型:(i)基于三波段多光谱激光雷达强度图像(IMEAN)的分类;(ii)基于多光谱激光雷达强度图像和伪NDVI(IMEAN+伪NDVI)叠加向量的分类;(iii)基于多光谱激光雷达强度图像叠加矢量和nDSM(IMEAN+nDSM)的分类;(iv)基于多光谱激光雷达强度图像叠加矢量和MP(IMEAN+MP)的分类;(v) 基于多光谱激光雷达强度图像叠加矢量和HMP(IMEAN+HMP)的分类;(vi)基于多光谱激光雷达强度图像叠加矢量、伪NDVI、nDSM和MP(IMEAN+伪NDVI+nDSM+MP)的分类;以及(vii)基于多光谱激光雷达强度图像叠加向量、伪NDVI、nDSM和HMP(IMEAN+伪NDVI+nDSM+HMP)的分类。
对于所有模型,均采用径向基函数(RBF)核。正则化参数C的值和RBF核的伽马值通过网格搜索程序选择,在相同范围{10]内进行五次交叉验证−5,10−4.104,105}. 分类准确度根据总体准确度(OA,[%])、Kappa统计量(K)和分类准确度进行评估。
四、结果
表2显示了在研究区域测试的七种不同模型的分类结果。基于三波段强度图像的分类性能相对适中(74.66%)。然而,从强度图像中提取的辅助特征对于提高分类精度非常有用。在提取的特征中,与强度图像相比,伪NDVI、nDSM、MP和HMP的总体精度分别提高了0.37%、12.12%、7.65%和18.14%。当强度图像与伪NDVI、nDSM和HMP特征相结合时,总体分类精度提高了18.62%。
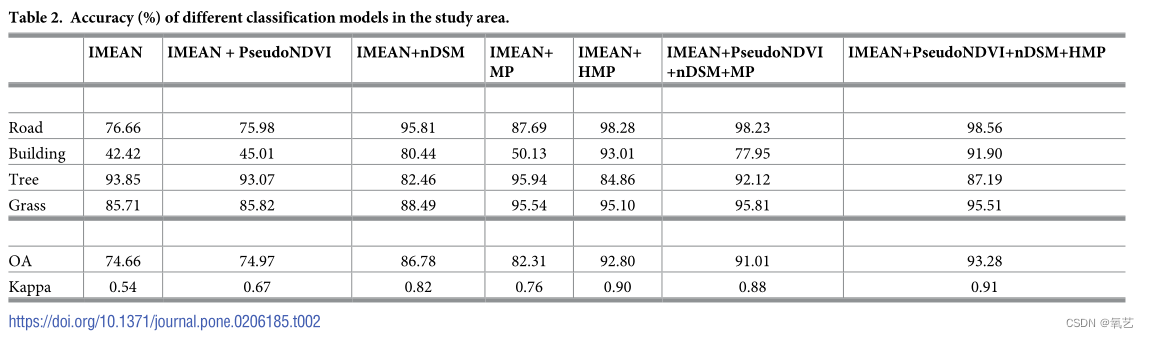
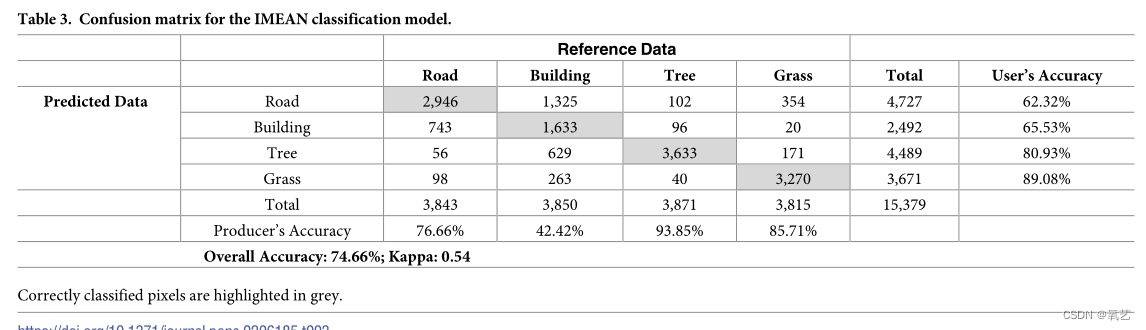
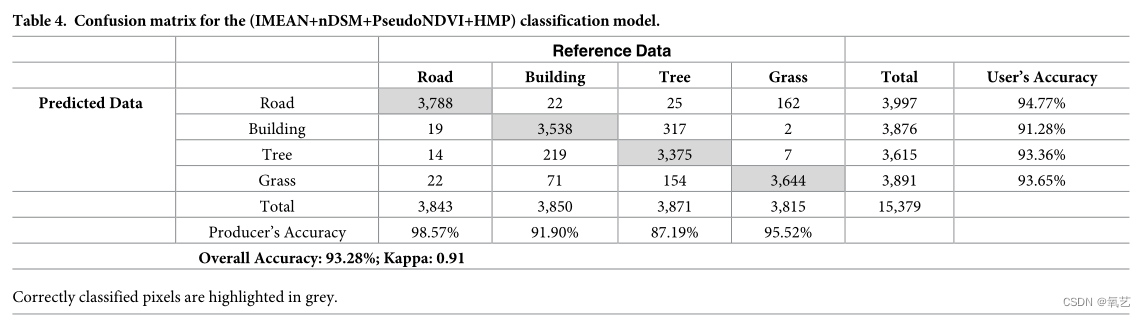
至于具体类别,由于这些类别之间存在混淆,基于强度图像,1类(道路)和2类(建筑)的分类精度最差(76.66%和42.42%)(见混淆矩阵表3)。虽然nDSM和MP特征分别改进了分类,但所提出的HMP特征大大提高了这两类的分类精度。结合所有特征(即IMEAN+伪NDVI+nDSM+HMP),获得最佳分类模型(总体精度和Kappa系数最高,另见混淆矩阵表4;补充材料中提供了其他模型的混淆矩阵(S1–S5表)。
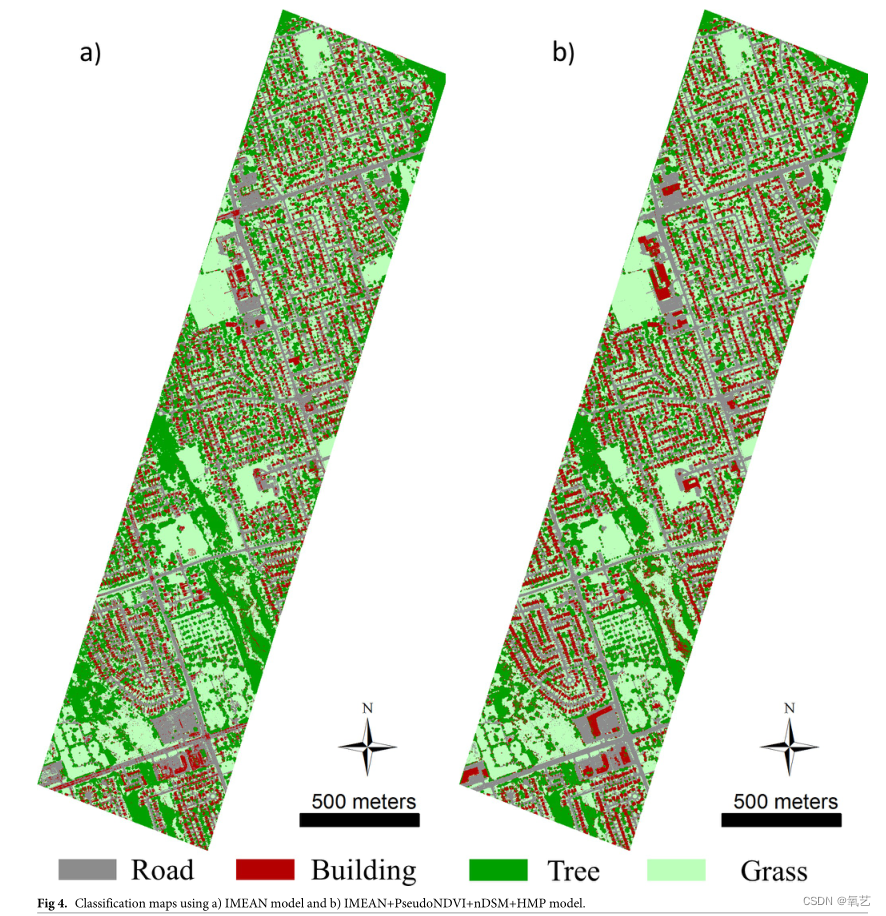
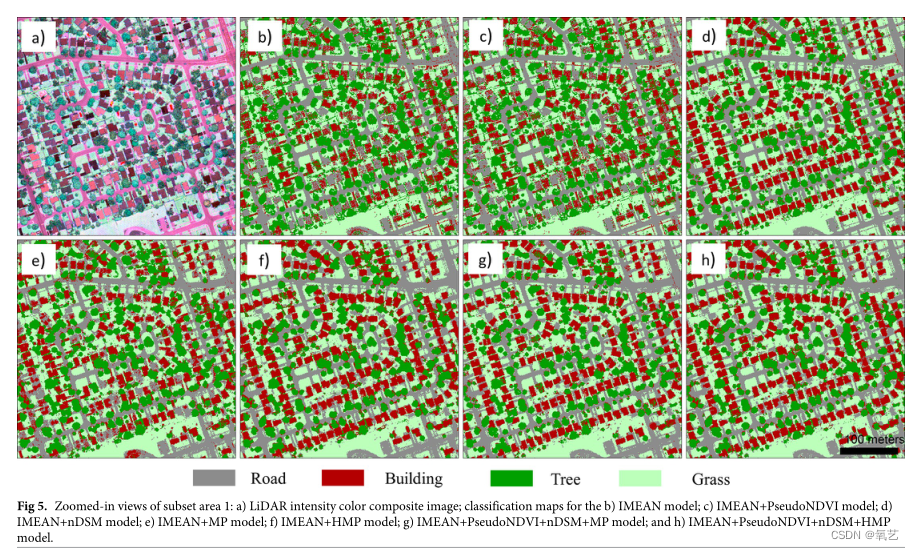
IMEAN和IMEAN+伪NDVI+nDSM+HMP的分类图如图4所示(其他测试模型的分类图(S1-S3图)见补充资料)。由于许多错误分类,强度图像的分类图具有最大的噪声,而第二个图(结合平均强度数据、伪NDVI、nDSM和MP的图)大大减少了分类误差,显示了更具空间一致性的分类结果。
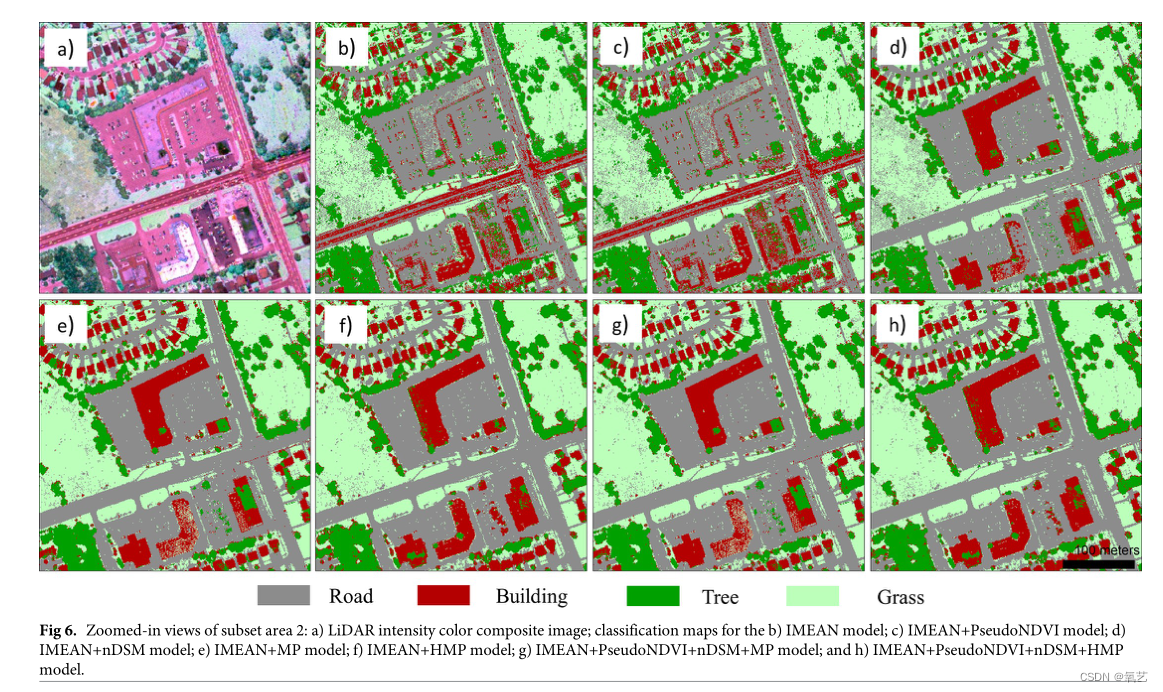
为了更好地展示地图细节,图5和图6分别显示了城区内两个典型区域(即住宅区和商业区)的放大子集。图5中的高精度建筑图和图6中的建筑和路线图清楚地表明,提出的HMP特征可以极大地改善分类结果。
五、讨论
5.1 空间特征在多光谱激光雷达分类中的重要性
在这个快速变化的世界中,及时准确地对城市区域进行分类对于城市规划和可持续管理至关重要[1,55]。在这项研究中,我们利用最先进的多光谱激光雷达传感器(Optech Titan)技术和从多光谱激光雷达获得的辅助信息进行土地覆盖分类;通过结合多光谱激光雷达数据和形态学剖面,我们对城市地区的地形进行了分类。我们研究的分类结果表明,多光谱激光雷达数据能够记录来自土地覆盖物的各种光谱信号,因此强调了其有效城市区域分类的潜力。
在此,我们将多光谱激光雷达强度数据分为四类,即建筑物、树木、道路和草地,并在使用强度数据、伪NDVI、nDSM和HMP组合时获得最高的总体分类精度。之前的研究表明,多光谱激光雷达数据为城市土地覆盖分类提供了更多好处[29];为了提高分类精度,利用了伪NDVI和DSM或nDSM特征[34,37,56-58]。与以往的研究一致,本研究进一步证明,伪NDVI和nDSM可以提高多光谱激光雷达强度图像的分类精度。
此外,本研究进一步证明,与仅使用多光谱激光雷达强度数据的方法相比,包含空间特征(MP和建议的HMP)对于获得高精度分类结果非常有用;具体来说,道路和建筑类在我们的案例中受益最大。一般来说,由于多种原因,很难对上述类别进行分类;城市地区的道路上挤满了车辆,因此在图像中形成了高反射点(见图6A);建筑物通常覆盖着不同颜色的屋顶(见图5A和图6A)。尽管由于高度分布不同,nDSM功能大大提高了这两个类别的分类精度,但它也在树和草之间引入了更多分类错误(参见混淆矩阵S2表),从而降低了这两个类别的分类精度。MP使道路和建筑物的分类准确率分别提高了11.03%和7.71%。然而,这两个类别之间的许多分类错误是由于包含MP功能而导致的(例如,建筑类别的生产者精度仅高达50.13%),因为它缺乏在垂直维度上操作的能力。所提出的HMP通过提取不同垂直层上的MP特征来考虑高度信息。这样,这两个类别的分类精度分别提高了98.23%和93.01%。这表明,MP特征通过捕捉不同土地覆盖类型的空间特征,可用于多光谱激光雷达强度数据的分类。通过结合垂直信息(通常由激光雷达数据中的nDSM数据提供),建议的HMP特征提供了比MP特征更好的辨别能力。
5.2 与以往研究的比较
本研究采用支持向量机分类器作为基础分类器,因为其对遥感图像分类的鲁棒性和高精度[54,59,60]。发现HMP与多光谱激光雷达强度图像的叠加向量显著提高了分类精度,使研究区域的总体精度达到93.28%。用于与多光谱激光雷达数据相关的分类的替代方法有基于对象的分析、数据聚类方法和最大似然分类器。Zou等人[37]提出了一种基于对象的图像分析(OBIA)方法,用于使用多光谱激光雷达点云进行三维土地覆盖分类;将土地覆盖类型分为9类时,总体准确率超过90%。然而,由于类似的光谱特性,有时由于缺乏有效的光谱和空间特征来区分类别边界,导致了一些错误分类的对象,例如被归类为草坪和裸土的道路。Matikainen等人[33]评估了从多光谱激光雷达数据中得出的不同光谱指数在土地覆盖分类和地图更新中的应用;该研究考虑的类别包括建筑、树木、沥青、砾石、岩石区域和低植被,与验证点相比,准确率为96%。多光谱激光雷达数据与旧地图矢量相结合,被证明能够增强建筑物的自动变化检测,并有助于消除数据生成的强度图像上的阴影;测绘中常用的被动航空成像受到外部光照条件的影响,往往会在强度图像上产生过多阴影。Bakula等人[35]融合了多波长激光强度图像、高程数据和纹理信息,并应用光谱(使用最大似然规则)和光谱纹理分类方法来区分6个类别;他们的总体准确率为90%。在这项研究中,发现应用额外的形态分类和粒度变换可以极大地提高建筑物和道路分类的分离精度,因为它们消除了最初混淆的几个像素。他们还注意到,插值强度光栅对改善分类结果没有太大帮助;尽管使用第一次和最后一次返回的强度光栅对该研究略有益处。本质上,我们使用强度特征进行分类的策略产生了与相关研究类似的精度,并且考虑到它对通过强度图像与伪NDVI、nDSM和HMP特征相结合获得的整体分类(18.62%)的提升,该方法可能对未来的多光谱激光雷达工作有效;e、 例如,植物物种分类[61–63],城市变化检测[64,65],洪水淹没制图[66],甚至碳封存建模[67]。
5.3 影响和未来方向
尽管多光谱激光雷达数据可被视为支持后续城市规划和制图操作的关键工具[36,38,68],但数据处理应谨慎进行。应记住,选择适合大空间范围的几何和辐射校正方程、当类别数量较大时的拟合分类方法、创建强度光栅的适当插值技术、数据收集过程中的距离模糊度、,强度不均匀性和能量损失(主要由窄扫描角引起),以及激光束入射角和目标材料照明对激光雷达强度数据的未知影响——已经存在,这些问题需要解决,以便有效利用多光谱数据[35–37,69]。此外,与多光谱激光雷达传感器相关的高昂成本限制了其适用性。因此,在获得多光谱激光雷达之前,应明确目的和议程,以确保结果将证明投资合理,并满足预期。在这方面,我们建议在个案基础上使用多光谱激光雷达,土地覆盖分类等操作应被视为副产品或多个目标之一,同时使用多光谱激光雷达优化数据采集所花费的金额。
六、结论
在这项研究中,我们评估了尖端激光雷达传感器、多光谱Optech Titan以及先进的建模衍生工具对城市地区土地覆盖分类的能力。具体来说,我们只考虑了来自激光雷达数据(即强度数据和nDSM数据)的光栅产品,并从强度数据中提取MP特征。为了在保持垂直结构信息的同时提取多光谱激光雷达强度数据的空间特征,提出了一种新的层次形态轮廓特征。结果表明,MP特征有助于在城市地区提供空间一致的土地覆盖分类。此外,通过利用高度信息,在多光谱激光雷达数据的不同特征中,所提出的HMP特征效果最好。通过我们的最佳测试模型(IMEAN+伪NDVI+nDSM+HMP),我们获得了城市地区四类土地覆盖分类的总体准确率为93.28%。我们的研究结果表明,从三波段激光雷达强度合成图像中提取空间特征可以大大提高分类结果。未来的研究可能会进一步开发应用于多光谱激光雷达数据的光谱空间分类方法,并可能直接对点云数据进行分类(即考虑几何特征),这对特征提取方法提出了新的挑战。
支持信息
S1图a)IMEAN+伪NDVI模型和b)IMEAN+nDSM模型的分类图。
(TIF)
S2图a)IMEAN+MP模型和b)IMEAN+HMP模型的分类图。
(TIF)
S3图:IMEAN+伪NDVI+nDSM+MP模型的分类图。
(TIF)
S1表格。IMEAN+伪NDVI分类模型的混淆矩阵。正确分类的像素以灰色突出显示。
(PDF)
S2表格。IMEAN+nDSM分类模型的混淆矩阵。正确的像素以灰色高亮显示。
(PDF)
S3表格。IMEAN+MP分类模型的混淆矩阵。正确分类的像素以灰色突出显示。
(PDF)
S4表格。IMEAN+HMP分类模型的混淆矩阵。正确的像素以灰色高亮显示。
(PDF)
S5表格。IMEAN+伪NDVI+nDSM+MP分类模型的混淆矩阵。正确分类的像素以灰色突出显示。
(PDF)
致谢
本工作由国家自然科学基金(批准号:41401421,41701397)和中国科学院遥感与数字地球研究所所长青年基金(Y6SJ2400CX)共同资助。我们感谢Paul LaRocque、Nicola Scotto和Teledyne Optech(http://www.teledynotech.com/)团队为我们提供了多光谱激光雷达数据样本
[1]Lian-Zhi, Huo, Carlos, et al. Supervised spatial classification of
multispectral LiDAR data in urban areas.[J]. Plos One, 2018.
参考文献
1.Vitousek P, Mooney H, Lubchenco J, Melillo J. Human domination of Earth’s ecosystems. Science. 1997, 277, 494–499.
人类对地球生态系统的统治
2.Bengston D.N., Fletcher J.O., Nelson K.C. Public policies for managing urban growth and protecting open space: policy instruments and lessons learned in the United States. Landscape and Urban Planning. 2004, 69, 271–286.
管理城市增长和保护开放空间的公共政策:美国的政策工具和经验教训
3.Schneider A, Friedl M.A, Potere D. Mapping global urban areas using MODIS 500-m data: new methods and datasets based on ‘urban ecoregions’. Remote Sens. Environ. 2010, 114, 1733–1746.
使用 MODIS 500 米数据绘制全球城市区域:基于“城市生态区域”的新方法和数据集
4.Lu D, Weng Q. A survey of image classification methods and techniques for improving classification performance. Int. J. Remote Sens. 2007, 28, 823–870.
提高分类性能的图像分类方法和技术的调查
5.Weng Q. Remote sensing of impervious surfaces in the urban areas: requirements, methods, and trends. Remote Sens. Environ. 2012, 117, 34–49.
城市地区不透水表面的遥感:要求、方法和趋势
6.Zhang Q. L, Seto K.C. Mapping urbanization dynamics at regional and global scales using multi-temporal DMSP/OLS nighttime light data. Remote Sens. Environ. 2011, 115, 2320–2329.
使用多时相 DMSP/OLS 夜间灯光数据绘制区域和全球尺度的城市化动态
7.Mertes C.M, Schneider A, Sulla-Menashe D, Tatem A.J, Tan B. Detecting change in urban areas at continental scales with MODIS data. Remote Sens. Environ. 2015, 158, 331–347.
用 MODIS 数据检测大陆尺度城市地区的变化
8.Sexton z, Song X. P, Huang C, Channan S, Baker M.E, Townshed J.R. Urban growth of the Washington, D.C.-Baltimore, MD metropolitan region from 1984 to 2010 by annual, Landsat-based estimates of impervious cover. Remote Sens. Environ. 2013, 129, 42–53.
1984 年至 2010 年华盛顿特区-巴尔的摩马里兰州大都市区的城市发展,基于 Landsat 的不透水覆盖年度估计
9.Li X, Gong P, Liang L. A 30-year (1984–2013) record of annual urban dynamics of Beijing City derived from Landsat data. Remote Sens. Environ. 2015, 166, 78–90.
北京城市年动态记录来自Landsat数据
10.Myint S.W, Gober P, Brazel A, Grossman-Clarker S, Weng Q. H. Per-pixel vs. object-based classification of urban land cover extraction using high spatial resolution imagery. Remote Sens. Environ. 2011, 115, 1145–1161.
使用高空间分辨率图像进行城市土地覆盖提取的每像素与基于对象的分类
11.Pesaresi M, Ehrlich D, Caravaggi I, Kauffmann M, Louvrier C. Toward global automatic built-up area recognition using optical VHR imagery, IEEE J. Sel. Topics Applied Earth Observ. Remote Sens. 2011, 4, 923–934.
使用光学VHR图像实现全球自动建成区识别
12.Khatami R, Mountrakis G, Stehman S.V. A meta-analysis of remote sensing research on supervised pixel-based land-cover image classification processes: general guidelines for practitioners and future research. Remote Sens. Environ. 2016, 177, 89–100.
基于监督像素的土地覆盖图像分类过程遥感研究的荟萃分析:从业者和未来研究的一般指南
13.Benz U.C, Hofmann P, Willhauck G, Lingenfelder I, Heynen M. Object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogramm. Remote Sens. 2004, 58, 239–258.
面向对象的遥感数据模糊分析,用于GIS就绪信息
14.Blaschke T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16.
基于对象的遥感图像分析
15.Ma L, Li M, Ma X, Cheng L, Du P, Liu Y. A review of supervised object-based land-cover image classification. ISPRS J. Photogramm. Remote Sens.2017, 130, 277–293.
基于监督对象的土地覆盖图像分类综述
16.Huang X, Lu Q, Zhang L. A multi-index learning approach for classification of high-resolution remotely sensed images over urban areas. ISPRS J. Photogramm. Remote Sens. 2014, 90, 36–48.
城市地区高分辨率遥感图像分类的多指标学习方法
17.Huang X, Chen H, Gong J. Angular difference feature extraction for urban scene classification using ZY-3 multi-angle high-resolution satellite imagery. ISPRS J. Photogramm. Remote Sens. 2018, 135, 127–141.
利用ZY-3多角度高分辨率卫星图像进行城市场景分类的角差特征提取
18.Cheng G, Han J, Lu X. Remote Sensing image scene classification: benchmark and state of the art. Proceedings of the IEEE.2017, 105, 1865–1883.
遥感图像场景分类:基准和最新进展
19.Dare P. Shadow analysis in high-resolution satellite imagery of urban areas. Photogramm. Eng. Remote Sens. 2005, 71, 169–177.
城市地区高分辨率卫星图像中的阴影分析
20.Yan W.Y, Shaker A, El-Ashmawy N. Urban land cover classification using airborne LiDAR data: A review. Remote Sens. Environ. 2015, 158, 295–310.
利用机载激光雷达数据进行城市土地覆盖分类:综述
21.Silva C. A, Klauberg C, Hudak A. T, Vierling L. A, Jaafar W. S, Mohan M, et al. Predicting Stem Total and Assortment Volumes in an Industrial Pinus taeda L. Forest Plantation Using Airborne Laser Scanning Data and Random Forest. Forests, 2017, 8(7), 254.
利用机载激光扫描数据和随机森林预测工业火炬松人工林的树干总体积和分类体积
22.Zhou W, Troy A. An object-oriented approach for analysing and characterizing urban landscape at the parcel level. Int. J. Remote Sens. 2008, 29, 3119–3135.
在地块层面分析和描述城市景观的面向对象方法
23.Zhang K, Yan J, Chen S. C. Automatic construction of building footprints from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2523–2533.
从机载激光雷达数据自动构建建筑物足迹
24.Weinmann M, Jutzi B, Hinz S, Mallet C. Semantic point cloud interpretation based on optimal neighborhoods, relevant features and efficient classifiers. ISPRS J. Photogramm. Remote Sens. 2015, 105, 286–304.
基于最佳邻域、相关特征和有效分类器的语义点云解释
25.MacFaden S.W, O’Neil-Dunne J.P.M, Royar A.R, Lu J.W.T, Rundle A.G. High-resolution tree canopy mapping for New York City using LIDAR and object-based image analysis. J. Appl. Remote Sens. 2012, 6, 1–23.
使用激光雷达和基于对象的图像分析为纽约市绘制高分辨率树冠地图
26.Zhou W. An object-based approach for urban land cover classification: integrating LiDAR height and intensity data. IEEE Geosci. Remote Sens. Lett. 2013, 10, 928–931.
基于对象的城市土地覆盖分类方法:整合激光雷达高度和强度数据
27.Bork E.W, Su J. G. Integrating LiDAR data and multispectral imagery for enhanced classification of rangeland vegetation: A meta analysis. Remote Sens. Environ. 2007, 111, 11–24.
整合激光雷达数据和多光谱图像以增强牧场植被分类
28.Dalponte M, Bruzzone L, Gianelle D. Fusion of hyperspectral and LiDAR remote sensing data for classification of complex forest areas. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1416–1427.
用于复杂林区分类的高光谱和激光雷达遥感数据融合
29.Teo T.-A., Wu H.-M. Analysis of land cover classification using multi-wavelength LiDAR system. Applied Sciences, 2017, 7, 663.
利用多波长激光雷达系统进行土地覆盖分类分析
30.van Rees E. The First Multispectral Airborne Lidar Sensor. GeoInformatics, 2015, 18, pp. 10–12.
第一个多光谱机载激光雷达传感器
31.Bakuła K. Multispectral airborne laser scanning—a new trend in the development of LiDAR technology, Archiwum Fotogrametrii, Kartografii i Teledetekcji, 2015, 27, pp. 25–44.
多光谱机载激光扫描——激光雷达技术发展的新趋势
32.Matikainen L., Hyyppä J, Litkey P. Multispectral airborne laser scanning for automated map updating. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci., 2016, 41.
用于自动地图更新的多光谱机载激光扫描
33.Matikainen L, Karila K, Hyyppä J, Litkey P, Puttonen E, Ahokas E. Object-based analysis of multispectral airborne laser scanner data for land cover classification and map updating. ISPRS J. Photogramm. Remote Sens. 2017, 128, 298–313.
基于对象的多光谱机载激光扫描仪数据分析,用于土地覆盖分类和地图更新
34.Morsy S, Shaker A, El-Rabbany A. Multispectral LiDAR Data for Land Cover Classification of Urban Areas. Sensors. 2017, 17, 958. - PMC - PubMed
城市地区土地覆盖分类的多光谱激光雷达数据
35.Bakula K, Kupidura P, Jelowicki L. Testing of land cover classification from multispectral airborne laser scanning data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B7, 161–169.
从多光谱机载激光扫描数据进行土地覆盖分类测试
36.Fernandez-Diaz J.C, Carter W.E, Glennie C, Shrestha R.L, Pan Z, Ekhtari N, et al. Capability assessment and performance metrics for the titan multispectral mapping LiDAR. Remote Sens. 2016, 8, 936.
titan多光谱测绘激光雷达的能力评估和性能指标
37.Zou X, Zhao G, Li J, Yang Y, Fang Y. 3D land cover classification based on multispectral LiDAR point clouds. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B1, 741–747.
基于多光谱激光雷达点云的三维土地覆盖分类
38.Wichmann V, Bremer M, Lindenberger J, Rutzinger M, Georges C, Petrini-Monteferri F. Evaluating the potential of multispectral airborne LiDAR for topographic mapping and land cover classification. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, II-3/W5, 113–119.
评估多光谱机载激光雷达在地形测绘和土地覆盖分类中的潜力
39.Fauvel M, Tarabalka Y, Benediktsson J.A, Chanussot J, Tilton J.C. Advances in spectral-spatial classification of hyperspectral images. Proc. IEEE. 2013, 101, 652–675.
高光谱图像光谱空间分类的进展
40.Huo L. Z, Tang P, Zhang Z, Tuia D. Semisupervised classification of remote sensing images with hierarchical spatial similarity. IEEE Geosci. Remote Sens. Lett. 2015, 12, 150–154.
具有层次空间相似性的遥感图像半监督分类
41.Benediktsson J.A., Palmason J.A, Sveinsson J.R. Classification of hyperspectral data from urban areas based on extended morphological profiles. IEEE Trans. Geosci. Remote Sens. 2005, 43, 480–491.
基于扩展形态轮廓的城市地区高光谱数据分类
42.Fauvel M, Benediktsson J.A, Chanussot J, Sveinsson J.R. Spectral and spatial classification of hyperspectral data using SVMs and morphological profiles. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3804–3814.
使用支持向量机和形态学剖面对高光谱数据进行光谱和空间分类
43.Huo L. Z, Tang P. Spectral and spatial classification of hyperspectral data using SVMs and Gabor textures. In Proceedings of IEEE International Geoscience and Remote Sensing Symposium. 2011,1708–1711.
利用支持向量机和Gabor纹理对高光谱数据进行光谱和空间分类
44.Soille P, Pesaresi M. Advances in mathematical morphology applied to geoscience and remote sensing. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2042–2055.
应用于地球科学和遥感的数学形态学进展
45.Morsy S, Shaker A, El-Rabbany A. Potential use of multispectral airborne LiDAR data in land cover classification. Proceedings of the Asian conference on Remote Sensing (ACRS). 2016, 17–21.
多光谱机载激光雷达数据在土地覆盖分类中的潜在用途
46.Morsy S, Shaker A, El-Rabbany A. Evaluation of distinctive features for land/water classification from multispectral airborne LiDAR data at Lake Ontario. Proceedings of the 10th International conference on Mobile Mapping Technology (MMT). 2017, Cairo, Egypt, May 6–8.
从安大略湖的多光谱机载激光雷达数据评估陆地/水分类的独特特征
47.Morsy S, Shaker A, El-Rabbany A, LaRocque P.E. Airborne multispectral LiDAR data for land-cover classification and land/water mapping using different spectral indexes. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3(3), pp.217–224.
使用不同光谱指数进行土地覆盖分类和土地/水制图的机载多光谱激光雷达数据
48.Luzum B.J, Starek M, Slatton K.C. (2004) Normalizing ALSM intensities. GEM Center Report No. Rep 2004-07-0001, Civil and Coastal Engineering Department, University of Florida, US.
(2004)ALSM强度的标准化。GEM中心报告编号Rep 2004-07-0001
49.Isenburg M. LAStools—Efficient Tools for LiDAR Processing, accessed January 3, 2018.
Isenburg M.LAStools激光雷达处理高效工具
50.McGauchey R.J. FUSION/LDV: Software for LiDAR Data Analysis and Visualization. Forest Service Pacific Northwest Research Station USDA, Seattle, accessed Janruary. 15 2018,
McGauchey R.J.FUSION/LDV:激光雷达数据分析和可视化软件
51.Camps-Valls G, Gomez-Chova L, Munoz-Mari J, Via-Frances J, Calpe-Maravilla J. Composite kernels for hyperspectral image classification. IEEE Geosci. Remote Sens. Lett. 2006, 3, 93–97.
用于高光谱图像分类的复合核
52.Tuia D, Camps-Valls G, Matasci G, Kanevski M. Learning relevant image features with multiple-kernel classification. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3780–3791.
使用多核分类学习相关图像特征
53.Chang C.C, Lin C.J. LIBSVM: a library for support vector machines. ACM Trans. Intell. Syst. Tech. 2011, 2, 1–27.
LIBSVM:支持向量机库
54.Mountrakis G, Im J, Ogole C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259.
遥感中的支持向量机:综述
55.Jensen J. R, Cowen D. C. Remote sensing of urban/suburban infrastructure and socio-economic attributes. Photogramm. Eng. Remote Sens. 1999, 65, 611–622.
城市/郊区基础设施和社会经济属性的遥感
56.Huang M. J, Shyue S. W, Lee L. H, Kao C. C. A knowledge-based approach to urban feature classification using aerial imagery with lidar data. Photogramm. Eng. Remote Sens. 2008, 74, 1473–1485.
基于知识的城市特征分类方法
57.Hartfield K. A, Landau K. I, Van Leeuwen W. J. Fusion of high resolution aerial multispectral and LiDAR data: land cover in the context of urban mosquito habitat. Remote Sens., 2011, 3, 2364–2383.
高分辨率航空多光谱和激光雷达数据的融合:城市蚊子栖息地背景下的土地覆盖
58.Singh K. K, Vogler J. B, Shoemaker D. A, Meentemeyer R. K. LiDAR-Landsat data fusion for large-area assessment of urban land cover: Balancing spatial resolution, data volume and mapping accuracy. ISPRS J. Photogramm. Remote Sens. 2012, 74, 110–121.
激光雷达陆地卫星数据融合用于大面积城市土地覆盖评估:平衡空间分辨率、数据量和制图精度
59.Zhao L. J, Tang P, Huo L.Z. A 2-D wavelet-decomposition-based bag-of-visual-words model for land-use scene classification. Int. J. Remote Sens. 2014, 35, 2296–2310.
基于二维小波分解的视觉词汇袋模型在土地利用场景分类中的应用
60.Zhao L, Tang P, Huo L. Feature significance-based multibag-of-visual-words model for remote sensing image scene classification. J. Appl. Remote Sens. 2016, 10, 035004.
基于特征意义的多袋视觉词模型在遥感图像场景分类中的应用
61.Shi S, Song S, Gong W, Du L, Zhu B, Huang X. Improving backscatter intensity calibration for multispectral LiDAR. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1421–1425.
改进多光谱激光雷达的后向散射强度校准
62.Gaulton R, Danson F. M, Ramirez F. A, Gunawan O. The potential of dual-wavelength laser scanning for estimating vegetation moisture content. Remote Sens. Environ. 2013, 132, 32–39.
双波长激光扫描估算植被含水量的潜力
63.Wallace A. M, McCarthy A, Nichol C. J, Ren X, Morak S, Martinez-Ramirez D, et al. Design and evaluation of multispectral Lidar for the recovery of arboreal parameters. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4942–4954.
用于恢复树木参数的多光谱激光雷达的设计和评估
64.Vu T. T, Matsuoka M, Yamazaki F. LIDAR-based change detection of buildings in dense urban areas. In Geoscience and Remote Sensing Symposium, 2004. IGARSS’04. Proceedings. 2004, 5, 3413–3416.
基于激光雷达的密集城市地区建筑物变化检测
65.Lin Z, Kaneda H, Mukoyama S, Asada N, Chiba T. Detection of subtle tectonic–geomorphic features in densely forested mountains by very high-resolution airborne LiDAR survey. Geomorphology. 2013, 182, 104–115.
通过超高分辨率机载激光雷达测量探测密林山脉的细微构造-地貌特征
66.Bales J. D, Wagner C. R, Tighe K. C, Terziotti S. LiDAR-derived flood-inundation maps for real-time flood-mapping applications, Tar River Basin, North Carolina. U. S. Geological Survey. 2007, Report No. 2007–5032.
光雷达绘制的洪水淹没图,用于实时洪水测绘应用
67.Roise J.P, Harnish K, Mohan M, Scolforo H, Chung J, Kanieski B, et al. Valuation and production possibilities on a working forest using multi-objective programming, Woodstock, timber NPV, and carbon storage and sequestration. 2016, Scandinavian Journal of Forest Research, 31(7), 674–680.
利用多目标规划、木材存量、木材净现值以及碳储存和封存对工作森林进行评估和生产的可能性
68.Naveed F, Hu B. Individual Tree Crown Delineation Using Multi-Wavelength Titan LiDAR Data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-3/W3, 143–148
使用多波长Titan激光雷达数据描绘单株树冠
69.Briese C, Pfennigbauer M, Lehner H, Ullrich A, Wagner W, Pfeifer N. Radiometric calibration of multi-wavelength airborne laser scanning data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, I-7, 335–340.
多波长机载激光扫描数据的辐射定标
















 163
163











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











