






 本文详细介绍了如何在ROS框架下安装并配置AsusXtionProLive(OpenNI2),包括安装ROS Indigo框架及依赖项、避免USB自动暂停设置、RGB-D测试步骤等内容。
本文详细介绍了如何在ROS框架下安装并配置AsusXtionProLive(OpenNI2),包括安装ROS Indigo框架及依赖项、避免USB自动暂停设置、RGB-D测试步骤等内容。
原文地址:http://myzharbot.robot-home.it/blog/software/myzharbot-ros/asus-xtion-pro-live-openni2-ros-framework/
Asus Xtion Pro Live (OpenNI2) under ROS Framework
安装
首先安装“ROS Indigo” 框架.
安装流程非常简单,ROS框架完全支持OpenNI2,而且针对ARM处理器的预编译的Packages都可以在官方库中都可以获得
1、安装依赖项
执行:sudo apt-get install ros-indigo-rgbd-launch ros-indigo-openni2-camera ros-indigo-openni2-launch
2、确保不要设置USB自动暂停
RGB-D Test
1、安装rqt包以及其他相关包:
sudo apt-get install ros-indigo-rqt ros-indigo-rqt-common-plugins ros-indigo-rqt-robot-plugins
2、打开操作台终端(Ctrl+Alt+t):
执行:roscore
3、打开另一个操作台终端(Ctrl+Alt+t):
执行:roslaunch openni2_launch openni2.launch
4、新开一个操作台终端 (Ctrl+Alt+t):
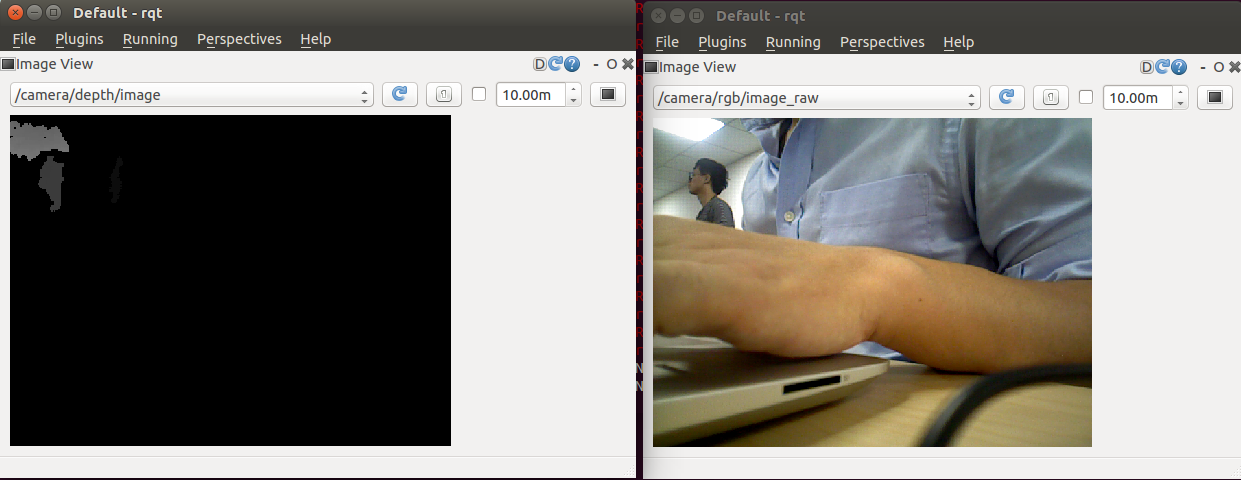
执行:rqt
5、在“rqt”窗口中选择 “Plugins” -> “Visualization” -> “Image View“
在选择框中选取你想看的图像类型,不过,不能同时打开IR流和深度流。
可以通过PC使用Rviz远程查看RGB 3D点云图像

















 1012
1012

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









