







安装依赖项
执行:
sudo apt-get install ros-kinetic-rgbd-launch ros-kinetic-openni2-camera ros-kinetic-openni2-launch进行测试
打开操作台终端(Ctrl+Alt+t):
执行:
roscore打开另一个操作台终端(Ctrl+Alt+t):
执行:
roslaunch openni2_launch openni2.launch新开一个操作台终端 (Ctrl+Alt+t):
执行:
rviz添加点云CloudPoint2
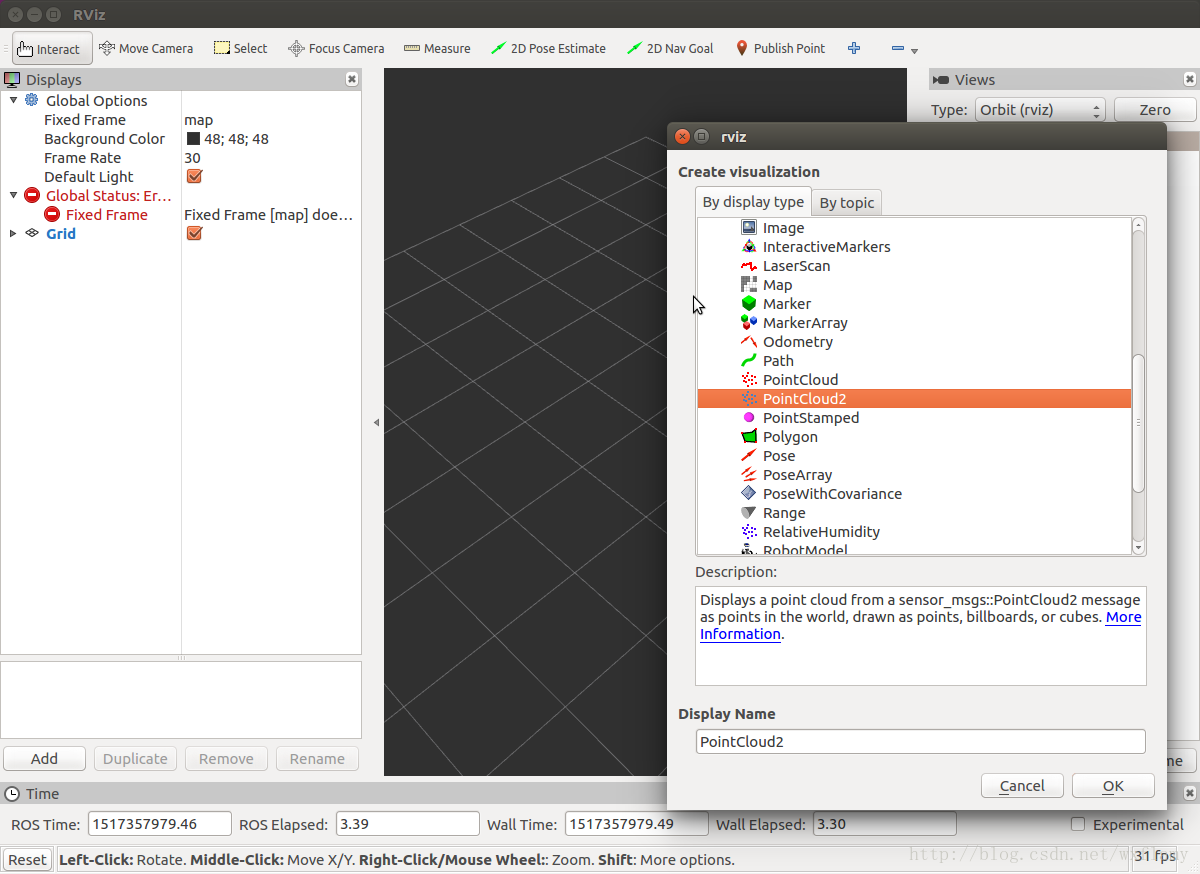
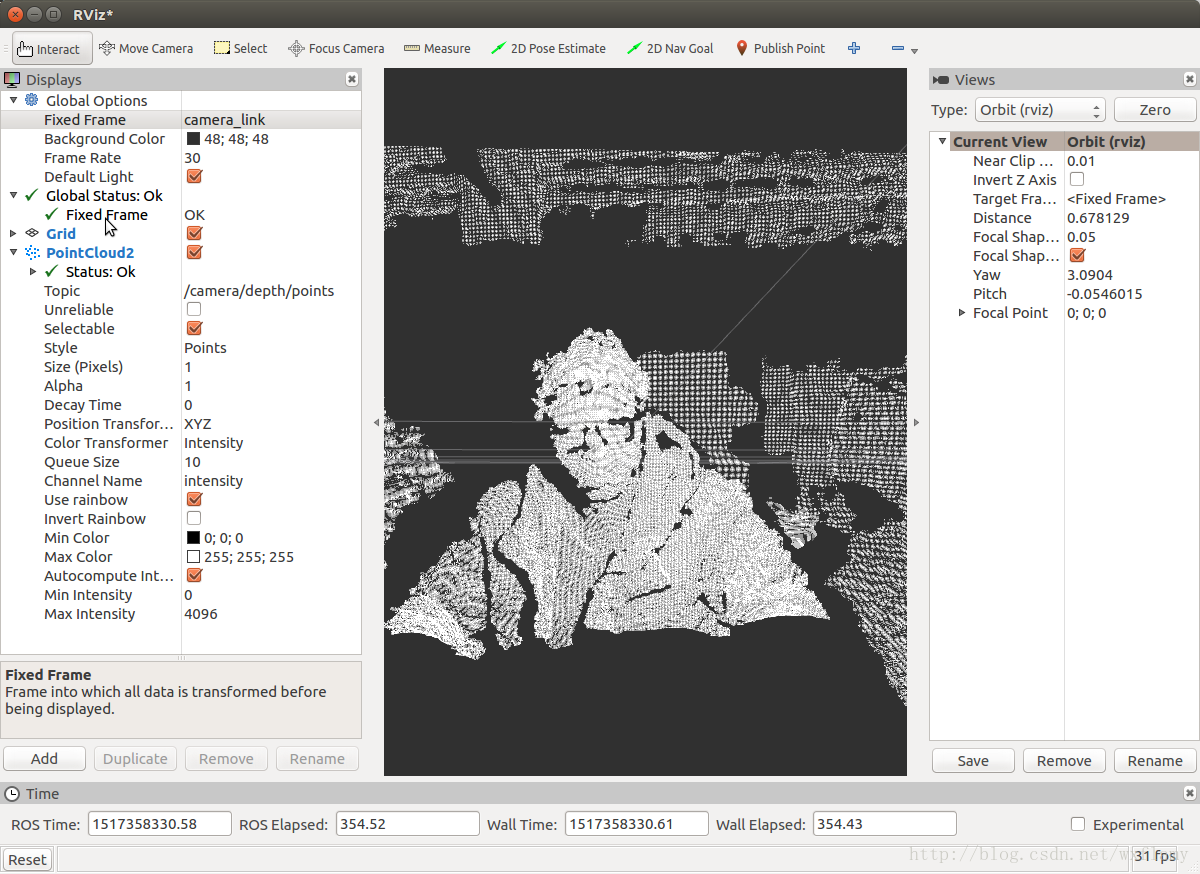
选好固定坐标系,选择topic,即可看到我点云的样子了。
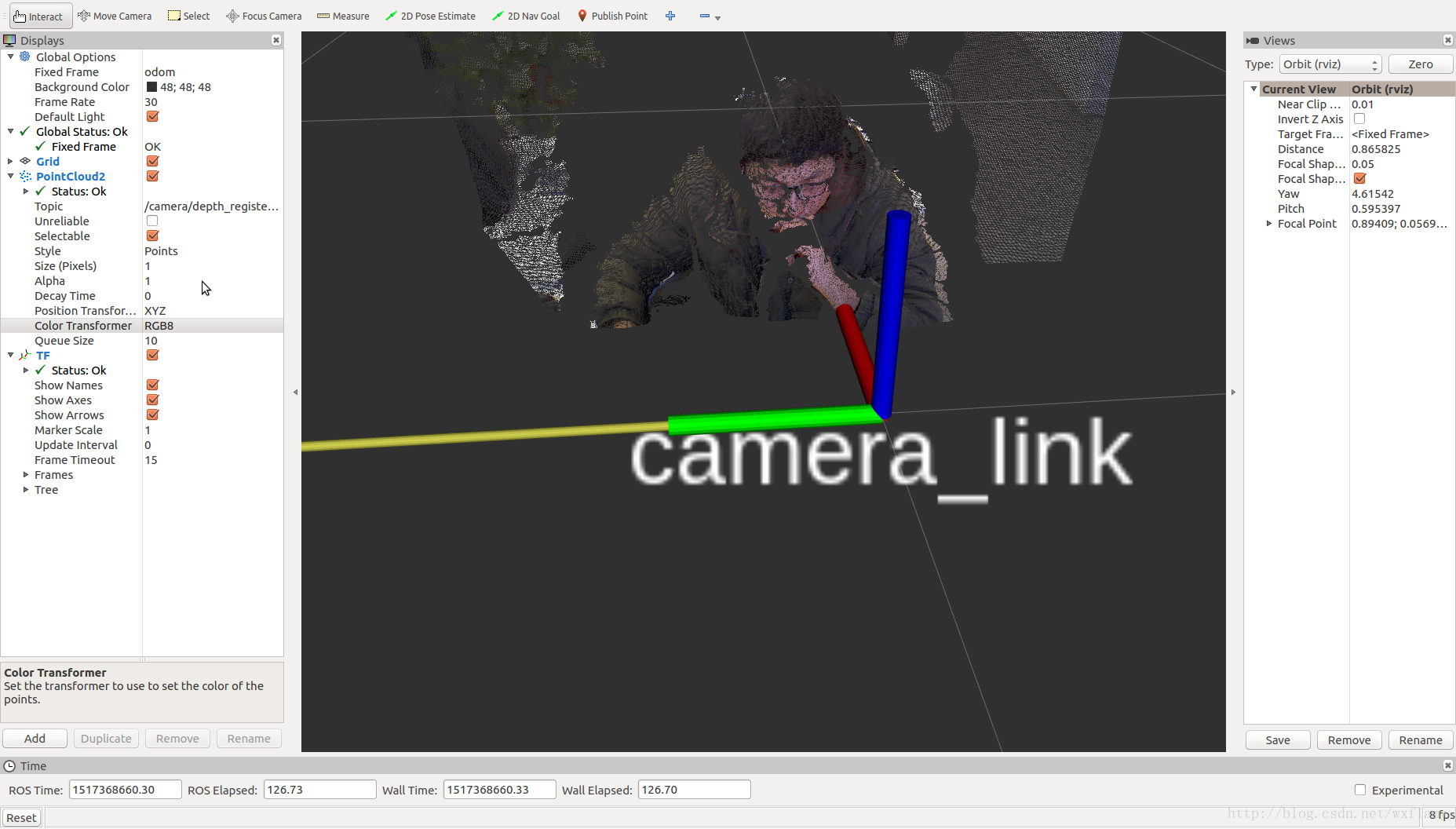
调整一下,还能看到彩色的我
使用一下
首先安装pcl
sudo add-apt-repository ppa:v-launchpad-jochen-sprickerhof-de/pcl
sudo apt-get update
sudo apt-get install libpcl1.7 下面是一段降采样的程序
#include <ros/ros.h>
#include <sensor_msgs/PointCloud2.h>
// PCL specific includes
#include <pcl_conversions/pcl_conversions.h>
#include <pcl-1.7/pcl/point_cloud.h>
#include <pcl-1.7/pcl/point_types.h>
#include <pcl-1.7/pcl/filters/voxel_grid.h>
#include <pcl-1.7/pcl/io/pcd_io.h>
ros::Publisher pub;
void cloud_cb (const sensor_msgs::PointCloud2 &input)
{
pcl::PointCloud<pcl::PointXYZ> cloud;
pcl::PointCloud<pcl::PointXYZ> cloud_downsampled;
sensor_msgs::PointCloud2 output;
pcl::fromROSMsg(input, cloud);
pcl::VoxelGrid<pcl::PointXYZ> voxelSampler;
voxelSampler.setInputCloud(cloud.makeShared());
voxelSampler.setLeafSize(0.01f, 0.01f, 0.01f);
voxelSampler.filter(cloud_downsampled);
pcl::toROSMsg(cloud_downsampled, output);
//output.header.frame_id = "base_link";
pub.publish(output);
}
int main (int argc, char** argv)
{
// Initialize ROS
ros::init (argc, argv, "c8_kinect");
ros::NodeHandle nh;
// Create a ROS subscriber for the input point cloud
ros::Subscriber sub = nh.subscribe ("/camera/depth/points", 1, cloud_cb);
// Create a ROS publisher for the output point cloud
pub = nh.advertise<sensor_msgs::PointCloud2> ("output", 1);
// Spin
ros::spin ();
}启动文件
<launch>
<include file="$(find openni2_launch)/launch/openni2.launch">
<!--arg name="config" value="true"/-->
</include>
<node name="rgbd_pub" pkg="tf" type="static_transform_publisher" args="1 0 0 0 0 0.70711 0.70711 /odom /camera_link 1000"/>
<node name="myxtion_node" pkg="xtion_pcl" type="c8_kinect"/>
<arg name="command_args" value="-d $(find xtion_pcl)/launch/xtion.rviz" />
<node name="rviz" pkg="rviz" type="rviz" respawn="false" args="$(arg command_args)" output="screen">
</node>
<!--node name="pcl_visualize_node" pkg="xtion_pcl" type="pcl_visualize"/-->
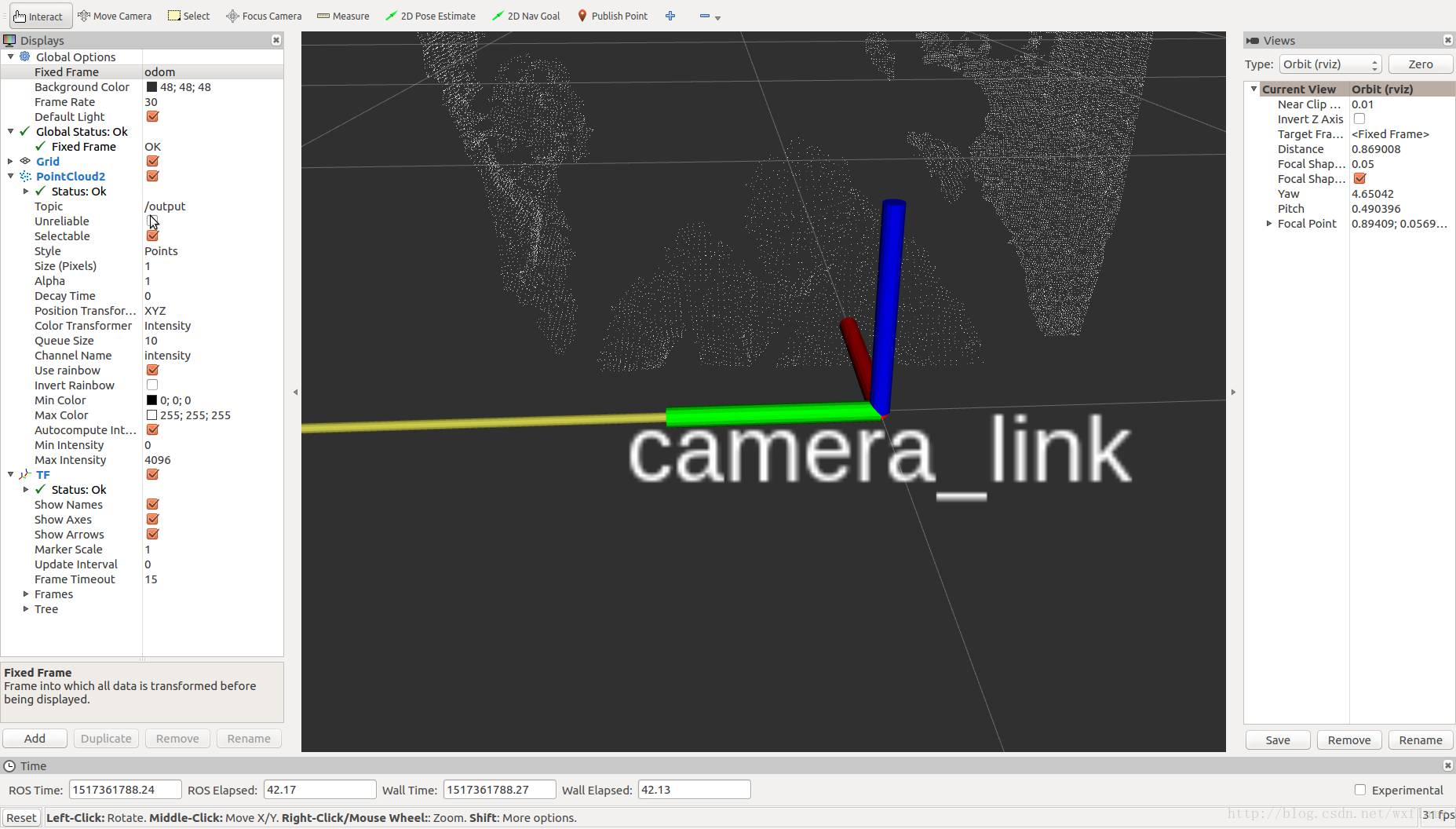
</launch>这就能看到采样后的我了
OpenCV的安装,官方文档:
https://docs.opencv.org/3.3.0/d7/d9f/tutorial_linux_install.html
















 1420
1420

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









