







 本文介绍OpenGL中深度截取的功能及其实现方法。通过一个示例程序展示了如何使用深度截取来处理超出近远裁剪平面的几何图形,以达到更好的视觉效果。
本文介绍OpenGL中深度截取的功能及其实现方法。通过一个示例程序展示了如何使用深度截取来处理超出近远裁剪平面的几何图形,以达到更好的视觉效果。
首先了解下视椎体,关于透视投影视椎体,如下图所示
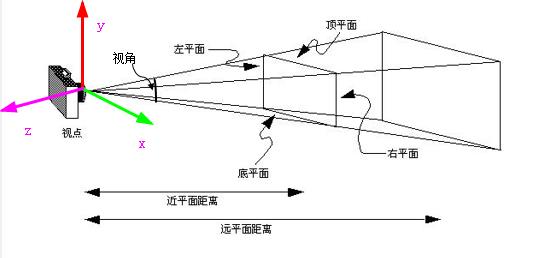
在视觉坐标系下,片段fragment的深度放缩到0-1之间的一个有限范围内。片段的深度值为0的话则表明它与近裁截面
重合相交(如果是真实世界的话就是刺入你的眼睛),1代表物体的最远距离(但不是无限远)。为了消除远裁截面
并在任意距离上绘制图形,我们需要在深度缓存depth buffer中储存任意大的深度值–当然这是计算机不可能实现的。
那么假设,我们希望在Z轴方向上可以看到近平面和远平面之外的场景,该怎么办?特别是在进行阴影区域渲染
时,要尽可能多的沿着Z轴方向保留几何图形,下面深度截取就起到作用了。
OpenGL可以用深度数值截取到0-1范围选项来关闭近远截面所造成的截面。这意味着任何在近平面之前,和远平面之
后的几何体都会被最终投射到平面之上从而被看见。
下面通过一个演示程序,在不开启深度截取的情况下,几何图形在视椎体范围的变化过程,代码如下:
#include <GLTools.h>
#include <GLShaderManager.h>
#include <GLFrustum.h>
#include <GLBatch.h>
#include <GLMatrixStack.h>
#include <GLGeometryTransform.h>
#include <StopWatch.h>
#include <math.h>
#include <stdio.h>
#pragma comment(lib, "gltools.lib")
#ifdef __APPLE__
#include <glut/glut.h>
#else
#define FREEGLUT_STATIC
#include <GL/glut.h>
#endif
GLShaderManager shaderManager; // Shader Manager
GLMatrixStack modelViewMatrix; // Modelview Matrix
GLMatrixStack projectionMatrix; // Projection Matrix
GLFrustum viewFrustum; // View Frustum
GLGeometryTransform transformPipeline; // Geometry Transform Pipeline
GLTriangleBatch torusBatch;
GLBatch floorBatch;
//
// This function does any needed initialization on the rendering
// context.
void SetupRC()
{
// Initialze Shader Manager
shaderManager.InitializeStockShaders();
glEnable(GL_DEPTH_TEST); //glEnable(GL_DEPTH_CLAMP) 开启深度截取功能,暂时先不开启
glPolygonMode(GL_FRONT_AND_BACK, GL_LINE);
glClearColor(0.0f, 0.0f, 0.0f, 1.0f);
// This makes a torus
gltMakeTorus(torusBatch, 0.4f, 0.15f, 30, 30);
floorBatch.Begin(GL_LINES, 324);
for (GLfloat x = -20.0; x <= 20.0f; x += 0.5) {
floorBatch.Vertex3f(x, -0.55f, 20.0f);
floorBatch.Vertex3f(x, -0.55f, -20.0f);
floorBatch.Vertex3f(20.0f, -0.55f, x);
floorBatch.Vertex3f(-20.0f, -0.55f, x);
}
floorBatch.End();
}
///
// Screen changes size or is initialized
void ChangeSize(int nWidth, int nHeight)
{
glViewport(0, 0, nWidth, nHeight);
// Create the projection matrix, and load it on the projection matrix stack
viewFrustum.SetPerspective(35.0f, float(nWidth) / float(nHeight), 1.0f, 100.0f);
projectionMatrix.LoadMatrix(viewFrustum.GetProjectionMatrix());
// Set the transformation pipeline to use the two matrix stacks
transformPipeline.SetMatrixStacks(modelViewMatrix, projectionMatrix);
}
// Called to draw scene
void RenderScene(void)
{
// Color values
static GLfloat vFloorColor[] = { 0.0f, 1.0f, 0.0f, 1.0f };
static GLfloat vTorusColor[] = { 1.0f, 0.0f, 0.0f, 1.0f };
// Time Based animation
static CStopWatch rotTimer;
float yRot = rotTimer.GetElapsedSeconds() * 60.0f;
// Clear the color and depth buffers
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
// Save the current modelview matrix (the identity matrix)
modelViewMatrix.PushMatrix();
// Draw the ground
shaderManager.UseStockShader(GLT_SHADER_FLAT,
transformPipeline.GetModelViewProjectionMatrix(),
vFloorColor);
floorBatch.Draw();
// Draw the spinning Torus
modelViewMatrix.Translate(0.0f, 0.0f, -1.2f);
modelViewMatrix.Rotate(yRot, 0.0f, 1.0f, 0.0f);
shaderManager.UseStockShader(GLT_SHADER_FLAT, transformPipeline.GetModelViewProjectionMatrix(),
vTorusColor);
torusBatch.Draw();
// Restore the previous modleview matrix (the idenity matrix)
modelViewMatrix.PopMatrix();
// Do the buffer Swap
glutSwapBuffers();
// Tell GLUT to do it again
glutPostRedisplay();
}
int main(int argc, char* argv[])
{
gltSetWorkingDirectory(argv[0]);
glutInit(&argc, argv);
glutInitDisplayMode(GLUT_DOUBLE | GLUT_RGB | GLUT_DEPTH);
glutInitWindowSize(800, 600);
glutCreateWindow("OpenGL SphereWorld");
glutReshapeFunc(ChangeSize);
glutDisplayFunc(RenderScene);
GLenum err = glewInit();
if (GLEW_OK != err) {
fprintf(stderr, "GLEW Error: %s\n", glewGetErrorString(err));
return 1;
}
SetupRC();
glutMainLoop();
return 0;
}
最终运行的结果如下:

从上图可以看出,当几何图形运行到近平面之外时,不在进行显示。下面在代码中的SetupRC()函数里面添加
glEnable(GL_DEPTH_CLAMP),开启深度截取功能。程序运行结果如下:

从这两个动画可以明显的区别出是否开启深度截取,对几何图形的影响。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









