









KITTI数据集是目前为止为数不多的机器人定位,制图,导航算法测试的数据集,使用成熟的数据集有利于和同行同类算法进行比较,也不用花大量时间去采集自己的数据集。
本文主要目的就自己在使用KITTI数据集过程中遇到的问题进行总结,并从实际的角度出发让我们如何尽快的将数据集用到自己的机器人导航算法中进行测试。
一句话:尽快把KITTI数据用起来。
从KITTI主页可以发现,KITTI数据集主要包括三个部分,相机和激光数据,calibration文件,groundtruth位置。如何明白三个部分的数据构成和参数意义,将会是我们使用KITTI数据的关键。
接下来将从三个部分展开。
1. 从KITTI数据到rosbag
为了在机器人导航系统中方便测试,先将KITTI图片数据转到ROS系统兼容的rosbag文件,以便于做出一个通用的数据集借口进行测试。
2. groundtruth真实地图
poses文件其实已经很方便的展示了相机的位姿,为了全面,也为了记录自己遇到问题过程,依然附上完整解释。
3. calib 相机参数
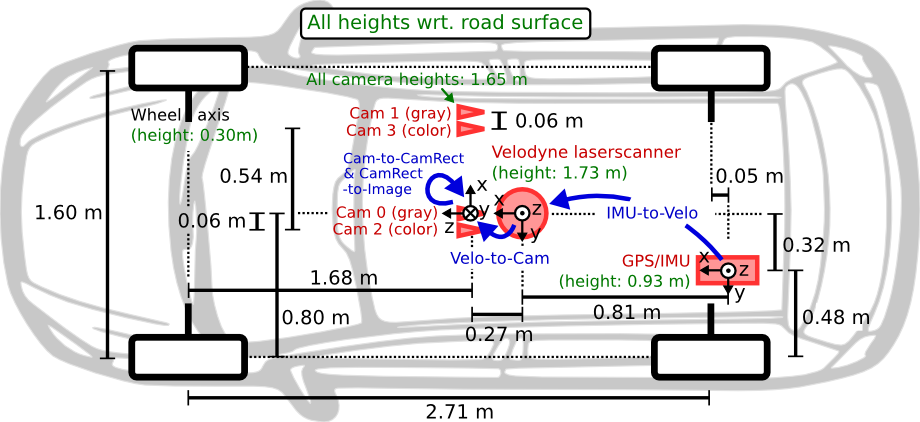
描述了相机的参数,以及传感器之间的关系,理解参数将有利于用于其他SLAM系统中,比如DSO,SVO,ORB-SLAM。
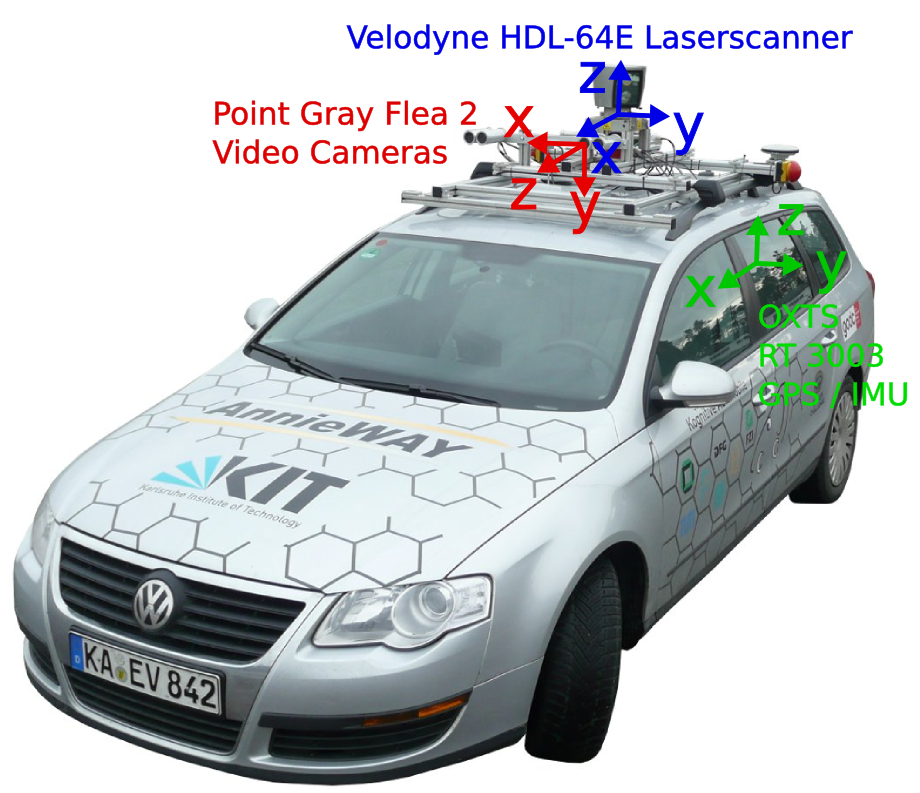
传感器设置如下图所示:















 156
156

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









