







一、官网
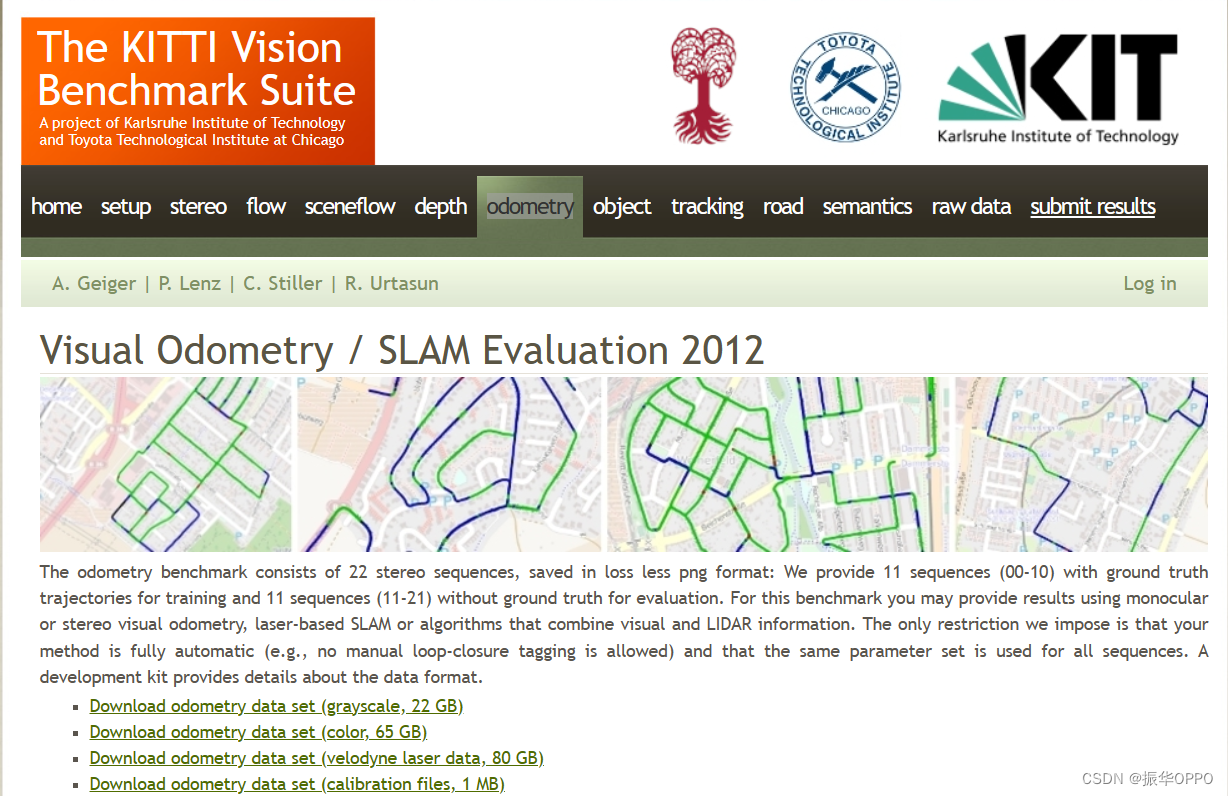
官网地址:https://www.cvlibs.net/datasets/kitti/eval_odometry.php
Kitti数据集很庞大,包含了双目、光流、场景流、深度、里程计、目标、跟踪、马路、语义、原始数据等大类别,每个大类别又包含很多的细分的序列。类别详情官网解释的很清楚。
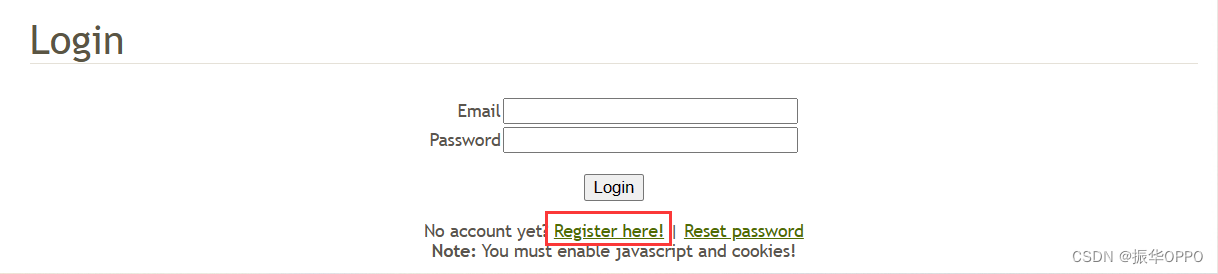
二、注册登录
点击注册,输入邮箱和密码,然后Register。
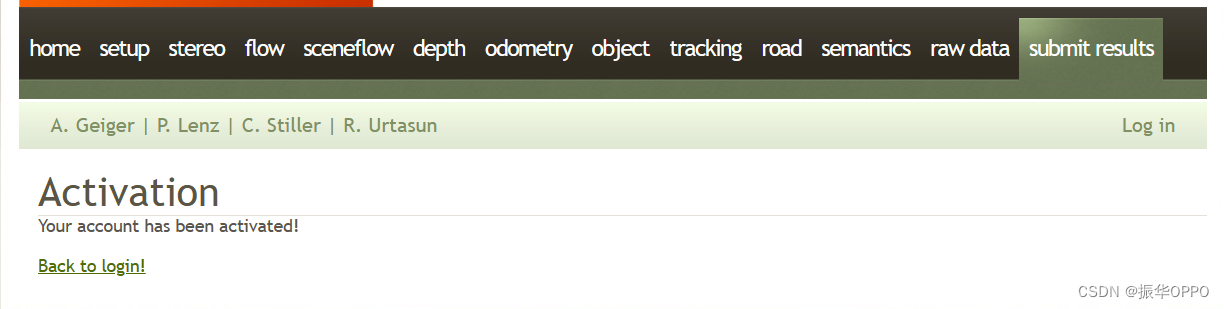
打开邮箱,点击验证链接激活账号。

成功激活会有提示。
使用账号密码登录。
三、下载数据集
比如我想下载自动驾驶的里程计数据集(灰度图,22GB),直接点击下载链接即可,如果你的下载速度很慢,建议直接找百度网盘链接下载。
四、测试数据集
可以在双目程序中运行数据集得到相机的轨迹和关键帧的轨迹,然后使用评估工具对各项指标进行评估。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











