







Kalman滤波器参数
结合自己平时处理的数据,简单分析下kalman滤波器中参数对于滤波效果的影响。
Kalman滤波参数影响总结
Predict中给出的方程:

其中Pz,vz,bz分别代表z轴方向的位置、速度和加速度;u为输入,r为扰动,Q为过程噪声;
由于在kalman滤波中应用的都是x(k)=A*x(k-1)+B*u(k-1)+Q;此处求解的为下一时刻的状态量。由于上面公式求解的为状态的导数。故转化为:

系统的kalman的simulink图为
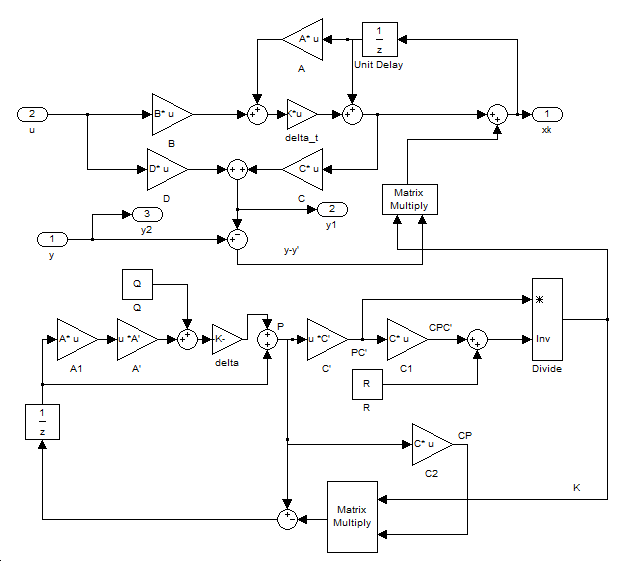
其中x(k)=x(k-1)+dx*delta_t 其中delta_t是由.m文件中程序设定累加的时间间隔,x(k)-->x(k-1)是由MATLAB的延迟模块1/z获得。Delta_t决定了采样的时间点的选取,越小说明采样越密集,精确度越高;1/Z模块是根据当前状态延迟一个时刻,得到前一个状态。状态中两者相互影响。
[u+r]为加速度和扰动的输入,即系统的可靠性。这里的加速度u=0,扰动r为白噪声,在.m文件中输入。
方差P的计算同上。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











