






永磁同步电机转速PI控制,SMC滑模控制,ADRC自抗扰控制Simulink对比仿真模型
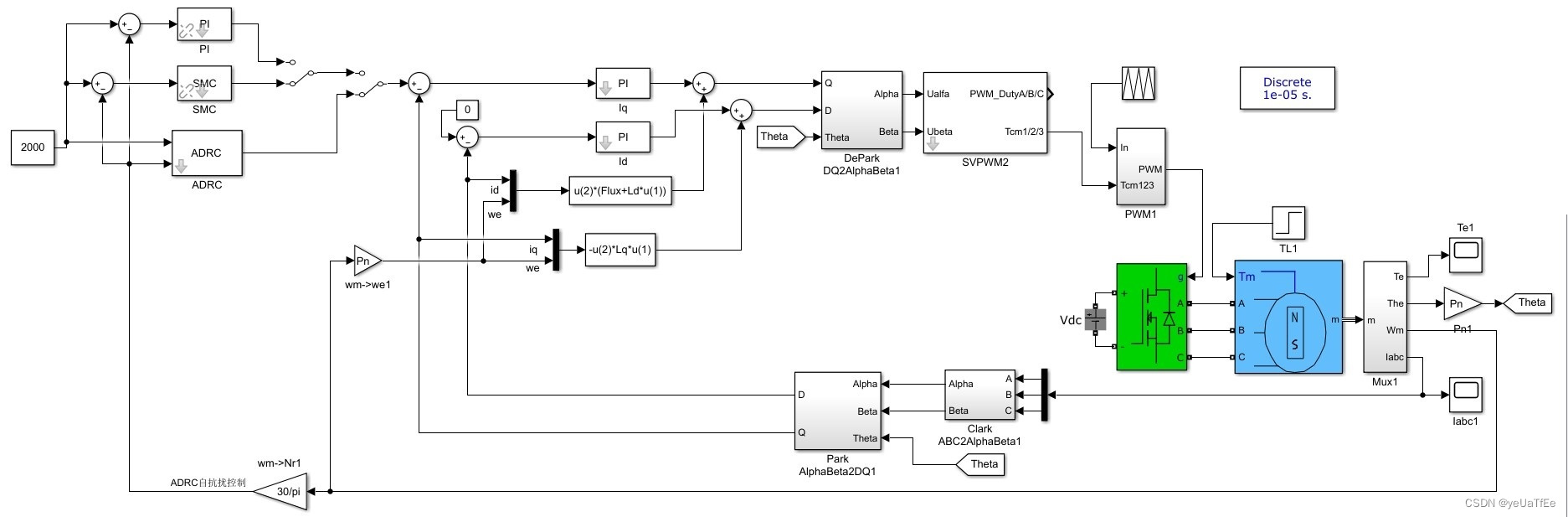
1.永磁同步电机SVPWM控制算法,实现FOC矢量控制,DQ轴解耦控制~
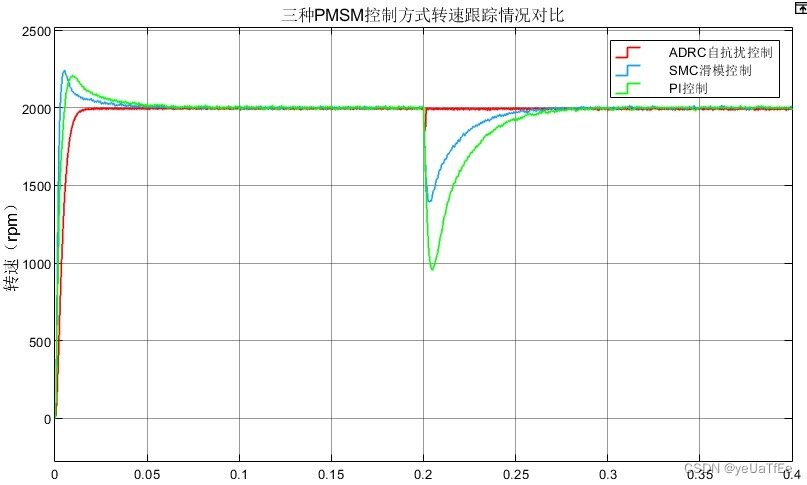
2.转速电流双闭环控制,电流环采用PI控制,转速环分别采用PI控制、SMC滑模控制和ADRC自抗扰控制,对三种方法进行对比,分析ADRC控制优越性~
永磁同步电机在现代工业中广泛应用,其高效、小型化、低噪音等特点深受市场青睐。然而,永磁同步电机的控制技术也面临着不小的挑战。本文将围绕永磁同步电机转速控制展开深入分析,比较常用的PI控制、SMC滑模控制和ADRC自抗扰控制三种控制方法的优缺点。
首先,针对永磁同步电机的控制算法,通常采用SVPWM控制算法实现FOC矢量控制和DQ轴解耦控制。这种控制算法可以将永磁同步电机的转矩控制和转速控制分开进行,从而实现更精准的控制。
其次,针对永磁同步电机的转速控制,常见的方法包括PI控制、SMC滑模控制和ADRC自抗扰控制。PI控制是一种经典的控制方法,其简单易实现、控制效果较为稳定,因此在实际应用中被广泛采用。但是,PI控制存在调节时间长、超调量大等缺陷,因此在控制精度要求较高的场合下,其表现并不尽如人意。
SMC滑模控制是一种基于变结构控制的方法,其对系统扰动具有强鲁棒性,能够有效消除模型不确定性和测量噪声对控制系统的影响。但是,SMC滑模控制算法存在滑模面设计困难、高频振荡等问题,对系统结构和控制参数的选择要求较高。
ADRC自抗扰控制是一种新兴的控制方法,其以自适应的方式进行控制,对系统模型不确定性和扰动具有很强的鲁棒性。相比于传统的控制方法,ADRC控制算法在许多方面具有更好的控制效果和更高的鲁棒性。
针对这三种控制方法,本文采用Simulink进行对比仿真模拟,分别对控制结果、控制稳定性和鲁棒性等进行定量分析。通过对比分析,我们可以得出如下结论:
对于控制精度较低、控制要求简单的场合,使用PI控制算法可以满足要求。对于调节时间和超调量有严格要求的场合,建议采用SMC滑模控制算法进行控制。而针对对控制精度和鲁棒性要求较高的场合,建议采用ADRC自抗扰控制算法进行控制。
综上所述,对于永磁同步电机转速控制,不同的控制方法具有各自的优缺点。在实际应用中,应根据控制精度、调节时间、鲁棒性等因素进行综合考虑,选择最适合的控制算法。未来,随着控制理论和计算工具的不断改进,永磁同步电机的控制技术也将不断得到优化和提高。
相关代码,程序地址:http://lanzouw.top/661001669662.html















 532
532











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









