







完整的项目代码在这里哦~
基于M3D-RPN实现单目3D检测 - 飞桨AI Studio
1. 项目说明
当前,3D 检测作为核心技术点,在机器人、增强现实等场景下应用广泛,发挥着至关重要的作用。传统依赖激光雷达的 3D 检测方法存在传感器昂贵难以部署,点云缺失纹理信息,分辨率低等诸多问题。
针对于此,开发单目 3D 检测模型,有效的利用图像相对于点云的种种优势,可以降低产业落地门槛,更广泛简单的部署到实际应用场景中。
单目的 3D 目标检测近几年一直是研究的热点,虽然往算法中添加先验知识,能够一定程度的提升准确率,但是也增加了获取标签的难度和算法设计的复杂性。
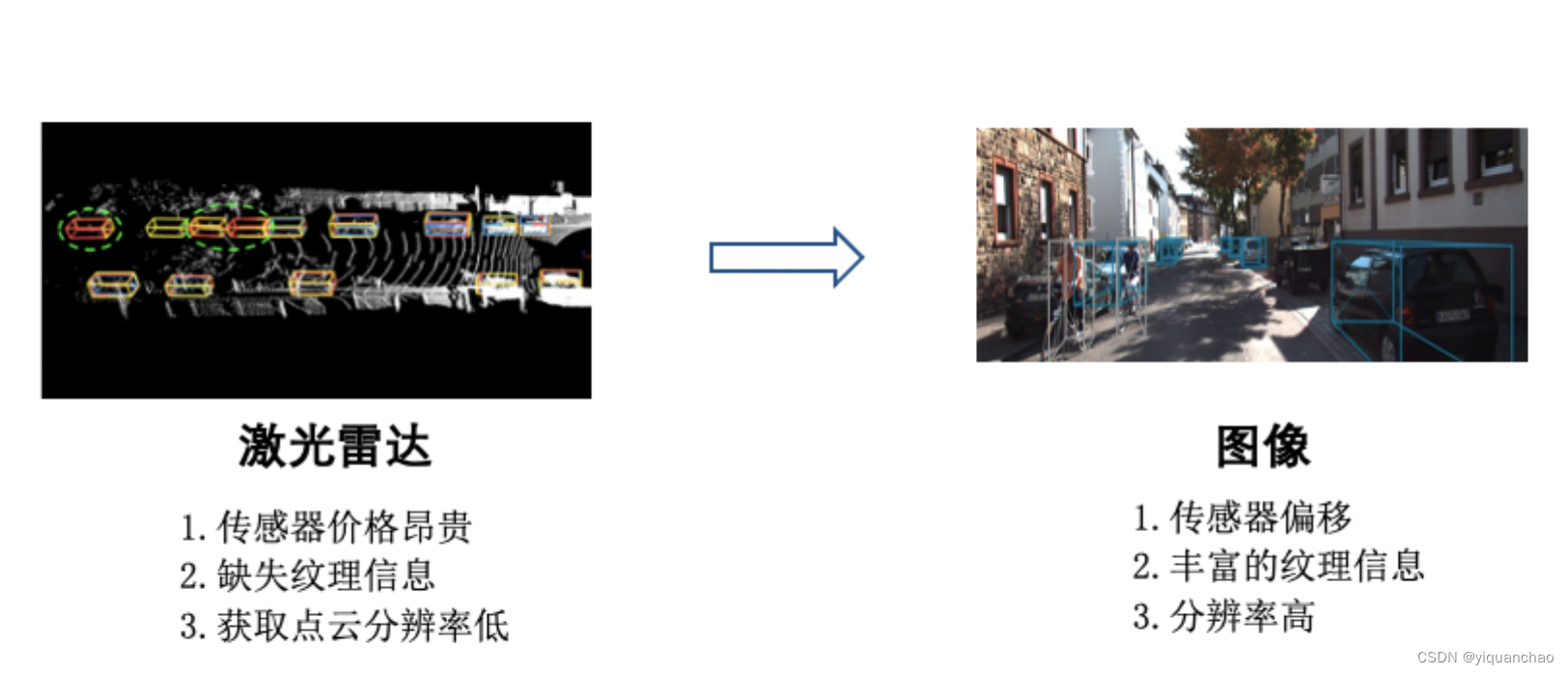
图 1 - 单目 3D 检测示例
欢迎扫码获取视频课程讲解,加入单目3D检测技术交流群,欢迎志同道合的同学:

方案难点:
- 深度信息缺失,由 2D 图像预测 3D 位置困难
- 相机传感器敏感,受环境影响(夜晚、雨天)等较大
- 图像层面,遮挡、截断等问题严重影响感知精度
2. 安装说明
2.1 环境要求
- Python >= 3.6
- paddlepaddle >= 2.0.2
- cuda >= 9
- boost 库
- 常见 Python 库
In [ ]
# 安装库
! pip install shapely2.2 解压数据及代码
项目代码在 M3D-RPN-2.0.tar 文件中,数据集在 kitti.tar 文件中,解压到合适路径即可使用。
In [ ]
# 如果希望解压到其他目录
# 可选择其他路径(默认 /home/aistudio )
! tar xf ~/data/data141443/kitti.tar
! unzip -qo ~/data/data141443/M3D-RPN-2.0.zip
! rm -rf __MACOSX2.3 安装依赖
In [ ]
# 删除已有软连接
! rm -rf ~/M3D-RPN-2.0/dataset/kitti_split1/training
! rm -rf ~/M3D-RPN-2.0/dataset/kitti_split1/validationIn [ ]
%cd ~/M3D-RPN-2.0/
! python dataset/kitti_split1/setup_split.py
! sh dataset/kitti_split1/devkit/cpp/build.sh
! cd lib/nms  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 3570
3570











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









