当然可以,以下是使用罗德里格斯公式求解七自由度机械臂逆解的MATLAB程序。请注意,这是一个简单的示例程序,需要根据您的具体情况进行修改和调整。
```matlab
% 七自由度机械臂逆解程序(使用罗德里格斯公式)
% 机械臂参数
L1 = 1; % 第一段臂长
L2 = 2; % 第二段臂长
L3 = 3; % 第三段臂长
L4 = 4; % 第四段臂长
L5 = 5; % 第五段臂长
L6 = 6; % 第六段臂长
L7 = 7; % 第七段臂长
% 目标末端执行器位姿
Rd = [1, 0, 0; 0, 1, 0; 0, 0, 1]; % 目标末端执行器旋转矩阵
pd = [1; 2; 3]; % 目标末端执行器位置向量
% 初始关节角度
q0 = [0; 0; 0; 0; 0; 0; 0];
% 迭代求解逆解
q = q0;
for i = 1:100 % 迭代次数
% 计算当前末端执行器位姿
T = forward_kinematics(q, L1, L2, L3, L4, L5, L6, L7);
R = T(1:3, 1:3);
p = T(1:3, 4);
% 计算误差
eR = 0.5 * (Rd' * R - R' * Rd); % 旋转矩阵误差
ep = pd - p; % 位置向量误差
% 计算雅可比矩阵
J = jacobian(q, L1, L2, L3, L4, L5, L6, L7);
% 计算关节角度增量
dq = pinv(J) * [ep; eR(1, 3); eR(2, 1); eR(3, 2)];
% 更新关节角度
q = q + dq;
end
% 输出逆解
disp(q);
% 正向运动学函数
function T = forward_kinematics(q, L1, L2, L3, L4, L5, L6, L7)
T01 = dh_transform(0, pi/2, 0, q(1));
T12 = dh_transform(L1, 0, 0, q(2));
T23 = dh_transform(L2, 0, 0, q(3));
T34 = dh_transform(L3, 0, 0, q(4));
T45 = dh_transform(L4, pi/2, 0, q(5));
T56 = dh_transform(L5, -pi/2, 0, q(6));
T67 = dh_transform(L6, 0, 0, q(7));
T7E = eye(4);
T7E(1:3, 1:3) = rotx(-pi/2);
T = T01 * T12 * T23 * T34 * T45 * T56 * T67 * T7E;
end
% DH参数转换函数
function T = dh_transform(a, alpha, d, theta)
T = [cos(theta), -sin(theta)*cos(alpha), sin(theta)*sin(alpha), a*cos(theta);
sin(theta), cos(theta)*cos(alpha), -cos(theta)*sin(alpha), a*sin(theta);
0, sin(alpha), cos(alpha), d;
0, 0, 0, 1];
end
% 旋转矩阵绕x轴旋转函数
function R = rotx(theta)
R = [1, 0, 0; 0, cos(theta), -sin(theta); 0, sin(theta), cos(theta)];
end
% 旋转矩阵绕y轴旋转函数
function R = roty(theta)
R = [cos(theta), 0, sin(theta); 0, 1, 0; -sin(theta), 0, cos(theta)];
end
% 旋转矩阵绕z轴旋转函数
function R = rotz(theta)
R = [cos(theta), -sin(theta), 0; sin(theta), cos(theta), 0; 0, 0, 1];
end
% 雅可比矩阵计算函数
function J = jacobian(q, L1, L2, L3, L4, L5, L6, L7)
T01 = dh_transform(0, pi/2, 0, q(1));
T12 = dh_transform(L1, 0, 0, q(2));
T23 = dh_transform(L2, 0, 0, q(3));
T34 = dh_transform(L3, 0, 0, q(4));
T45 = dh_transform(L4, pi/2, 0, q(5));
T56 = dh_transform(L5, -pi/2, 0, q(6));
T67 = dh_transform(L6, 0, 0, q(7));
T7E = eye(4);
T7E(1:3, 1:3) = rotx(-pi/2);
T02 = T01 * T12;
T03 = T02 * T23;
T04 = T03 * T34;
T05 = T04 * T45;
T06 = T05 * T56;
T07 = T06 * T67;
z0 = [0; 0; 1];
z1 = T01(1:3, 3);
z2 = T02(1:3, 3);
z3 = T03(1:3, 3);
z4 = T04(1:3, 3);
z5 = T05(1:3, 3);
z6 = T06(1:3, 3);
p0 = [0; 0; 0];
p1 = T01(1:3, 4);
p2 = T02(1:3, 4);
p3 = T03(1:3, 4);
p4 = T04(1:3, 4);
p5 = T05(1:3, 4);
p6 = T06(1:3, 4);
p7 = T07(1:3, 4);
J = [cross(z0, p7-p0), cross(z1, p7-p1), cross(z2, p7-p2), cross(z3, p7-p3), cross(z4, p7-p4), cross(z5, p7-p5), cross(z6, p7-p6);
z0, z1, z2, z3, z4, z5, z6];
end
```
该程序使用罗德里格斯公式迭代求解七自由度机械臂的逆解,其中包括正向运动学函数、DH参数转换函数、旋转矩阵绕x轴旋转函数、旋转矩阵绕y轴旋转函数、旋转矩阵绕z轴旋转函数、雅可比矩阵计算函数。您可以根据自己的具体机械臂参数和需求进行修改和调整。













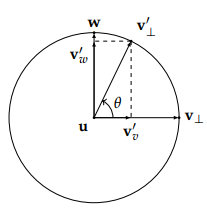
 又由于 u 为单位向量,所以可以得到 ||w|| = ||v⊥||。
又由于 u 为单位向量,所以可以得到 ||w|| = ||v⊥||。



 以上就完成了罗德里格斯公式的推导。
以上就完成了罗德里格斯公式的推导。















 960
960











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









