






车辆三自由度运动学模型;
Carsim/Simulink联合仿真;
无人驾驶车辆模型预测控制(2.1);
包括Carsim的设置、控制信号数据、PPT文件、cpar件、车辆运动分析图(适用于word两栏布局);
ID:616710071274851
车辆百宝箱

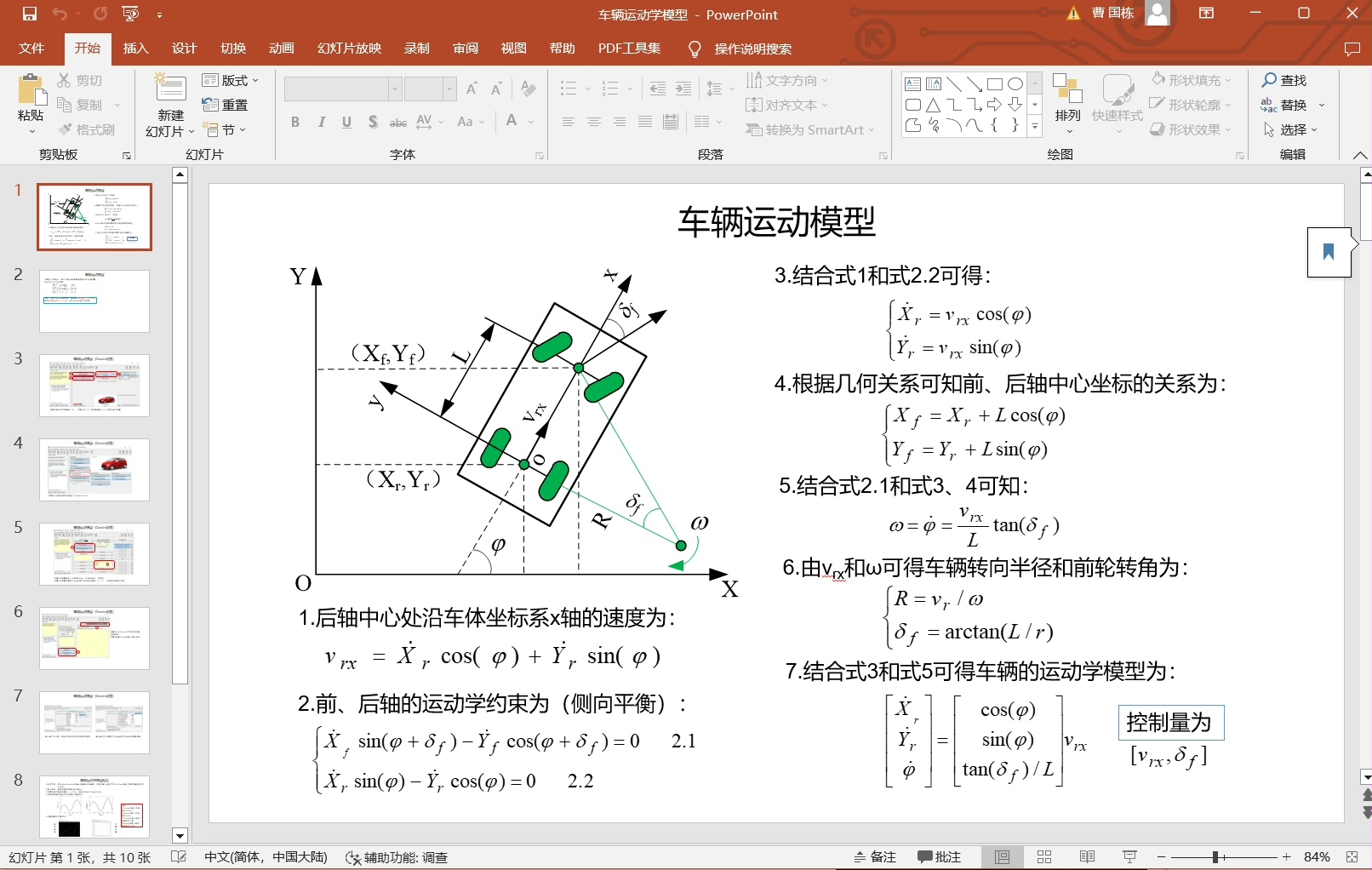
车辆三自由度运动学模型在无人驾驶技术中扮演着重要的角色。它是一种用于描述车辆运动的数学模型,能够通过对车辆的各种运动参数进行建模和控制,实现对车辆运动状态的精确预测和控制。本文将介绍基于Carsim Simulink联合仿真的无人驾驶车辆模型预测控制方法,包括Carsim的设置、控制信号数据、PPT文件、cpar件以及车辆运动分析图。
首先,我们需要了解车辆三自由度运动学模型的基本原理。车辆的三个自由度分别是车辆的横向运动、纵向运动和车身旋转。通过对车辆的各个自由度进行建模,我们可以得到车辆的运动状态方程,并据此进行控制。在车辆模型预测控制中,我们主要关注车辆的位置、速度以及姿态等重要参数的预测和控制。
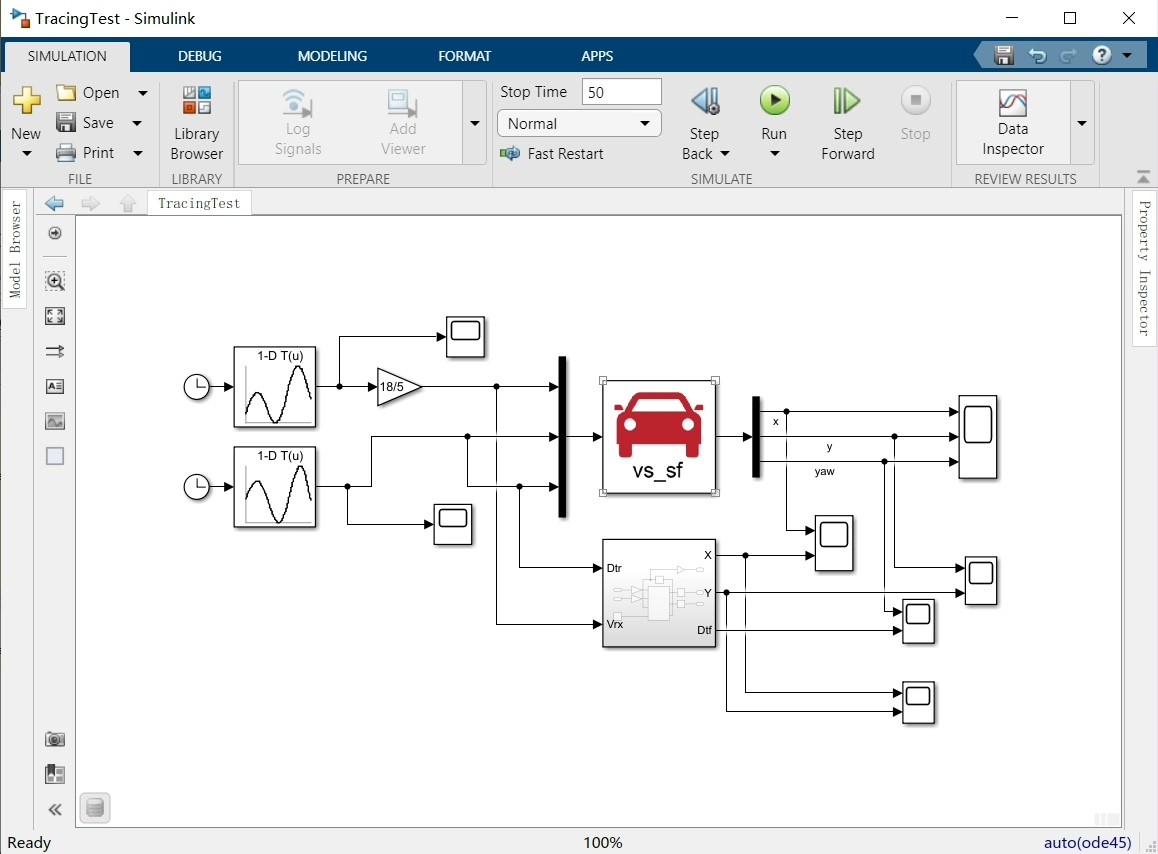
接下来,我们将介绍Carsim Simulink联合仿真的实现方法。Carsim是一款专业的车辆仿真软件,可以模拟车辆在不同路况和操纵条件下的运动行为。Simulink是一种基于模块化的可视化编程工具,可以用于搭建和仿真复杂的控制系统。通过将Carsim与Simulink进行联合仿真,我们可以实现对无人驾驶车辆的模型预测控制。在仿真过程中,我们可以设置车辆的初始状态和仿真时间,并通过控制信号数据对车辆进行控制。
在进行无人驾驶车辆模型预测控制之前,我们需要对Carsim进行适当的设置。首先,我们需要导入车辆的几何参数和质量信息,以确保模型的准确性。其次,我们需要设置车辆的初始状态和仿真时间,并选择合适的路况和操纵条件。最后,我们需要设置控制器的参数,例如PID控制器的比例、积分和微分增益等。这些设置将直接影响到无人驾驶车辆的运动预测和控制效果。
在模型预测控制过程中,我们可以通过Carsim输出的数据进行分析和评估。例如,我们可以将车辆的轨迹和速度数据导出到PPT文件中,并通过车辆运动分析图展示。这些数据和图表可以帮助我们更直观地了解无人驾驶车辆的运动行为,并评估控制算法的性能。
总之,基于Carsim Simulink联合仿真的无人驾驶车辆模型预测控制方法是一种有效的技术手段,可以帮助我们实现对车辆运动状态的精确预测和控制。通过合理设置Carsim参数、控制信号数据和运动分析图,我们可以更好地理解和评估无人驾驶车辆的运动特性。这对于提高无人驾驶技术的安全性和可靠性具有重要意义。
【相关代码,程序地址】:http://fansik.cn/710071274851.html
















 1284
1284











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









