







Image-Aided Position Estimation Based on Line Correspondences during Automatic Landing Approach
引言
文章分为4部分
- 已有的视觉降落手段综述
- 2D-3D状态估计的数学推导,基于文献Development 2015
- 误差传播推导
- 模拟和实际飞行实验
概述
IBVS Image Based Visual Servoing和PBVS Pose Based Visual Servping有所不同。前者直接从图像信息计算控制的指令,但是要求图像处理和控制系统强耦合。后者先构建自身和物体的位姿,再进行控制指令的计算。本文属于后者。
文章接着列举了许多基于点,线的位姿估计论文。由于年代太过古早就不细看了。
位姿估计
前面是一些基础内容,比如内外参,坐标系转换
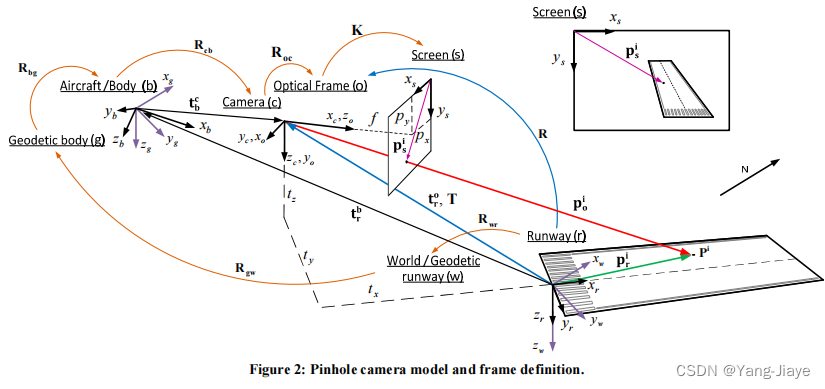
然后是线特征的投影公式
[
l
s
]
×
=
K
R
T
L
r
T
R
K
[l_s]_\times=KRTL_rTRK
[ls]×=KRTLrTRK
其中
R
T
∈
S
E
(
3
)
RT\in SE(3)
RT∈SE(3)是投影矩阵。这个公式在Development of a navigation 2013那篇文章里出现过。参考MVG教材和Plucker坐标的博客。
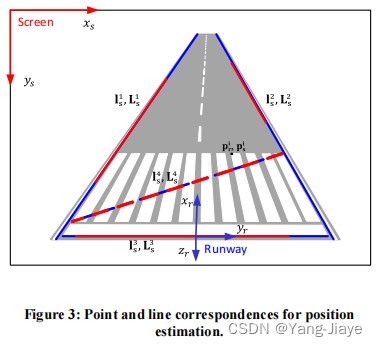
特征提取方法参考Development of a navigation 2013,还有Detection of Airport Runway 2011(跑道线综述博客里提到了)。
在2013年那篇文章里,只用了2条边线,没办法估计x方向。这篇文章增加2条线,如图
然后文章还提出加入点特征的对应,但是下面这个公式是不是推错了。r到o的变换
t
i
t_i
ti前面应该没有系数吧。

误差传播
这里讨论的是方差沿着表达式从一个变量传播到另一个变量,由于文章都是线性方程,所以遵守随机变量的线性组合的方差公式。有点像完好性里的误差传播讨论。
那最初的变量的方差如何获得呢?文章举了个例子,由IMU输出的姿态角有一个置信区间 Δ \Delta Δ,设置一个置信度,根据z检验,就可以反解方差 σ = Δ / z \sigma=\Delta/z σ=Δ/z
实验与讨论
文章用了3个平台,matlab,MS飞行模拟FS9,真实飞行。先用matlab生成理想的跑道数据,再用MS飞行模拟生成数据,最后是真实飞行。
Figure 9是matlab的模拟结果,红色是预测的误差方差。
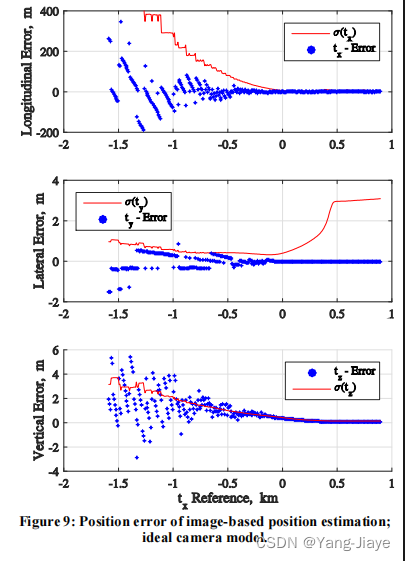
Figure 10是FS9的实验误差,在touchdown时出现了较大影响。
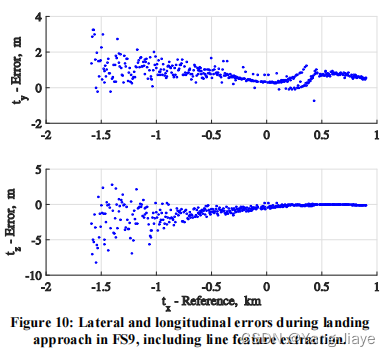
Figure 12是真实飞行的实验误差
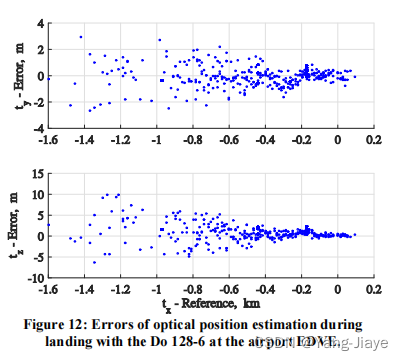
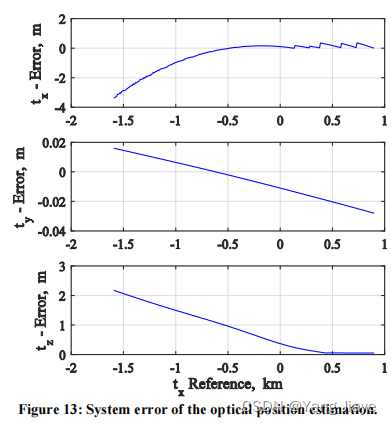
Figure 13是由于超定方程求解,还存在的系统误差,即使用完全精确的前端也存在的误差。















 893
893

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









