







PV-RCNN

Key Knowledgeable:
- Point-based and Voxel-based
- Voxel Set Abstraction (VSA)
FPS采样n个关键点。
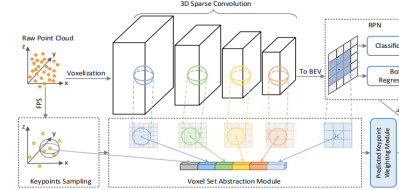
对于每个关键点,分别在原始点云图fraw、3D稀疏卷积之后的多尺度特征图fpv、BEV投影的特征fbev上采用PointNet++的思想将一个半径范围的点视为一个集合(Voxel-based),获取点与点之间的邻域特征:
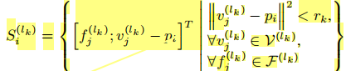
并将一个区域内的特征聚合(Point-based):
得到[fraw,fpv,fbev] - Predicted Keypoint Weighting.
最后再根据关键点特征进行前景点的置信度预测,为特征赋权: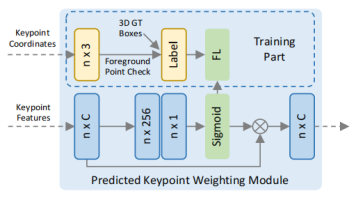

- RoI-grid Pooling
一方面同正常的RoI Pooling为了在不同大小的proposals中获得固定大小的特征。
另一方面使用VSA代替普通的avg或者padding的方法,灵活捕捉周围关键点的信息(甚至是proposal范围之外的)。
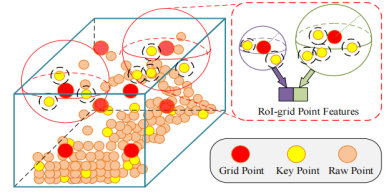
对每个proposal采样6×6×6个点,使用VSA来捕获周围关键点的特征:

并同上处理保存在采样点上:
设置不同的半径r来实现多尺度获得不同的接受域。
每个proposal都统一获得256个特征
用于最后的Confidence:和Box Refinement。















 1548
1548











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









