







一个中心 两个基本点 四项基本原则
一个中心,就是旋转中心,旋转中心的确定在一次定位中非常重要(一次定位指的是只进行一次拍照,针对当前点进行运算,多次定位广泛指先拍照进行角度纠偏,纠偏结束后再次拍照进行平移纠偏),旋转中心未校准正确时最常见的表相就是:1在只进行xy纠偏时,数据准确。2当旋转角度较小时,单个轴纠偏数据准确。3当旋转角度较大时两个轴纠偏都不准确。
两个基本,主要记录xy的方向与比例,我们进行的三点标定、九点标定、十二点标定其主要目的就是为了获得这两个基准:1目标坐标系的xy方向与当前坐标系的夹角(为什么说当前坐标系而不说图像坐标系,可思考一下)。2目标坐标系的实际尺寸与当前坐标系的比例关系。与此同时这两个基本也道明了,坐标系与坐标系之间的标定只能获取均值,而不能因图像不同区域有不同数据与之对应,所以工欲善其事必先利其器,两个坐标系之间的标定在开始前,先要进行畸变矫正。
四项基本原则,可能有些人不能苟同这个四个基本原则,但是这个四个基本原则可以解决你当前90%的定位、抓取、引导问题。这四个基本原则主旨只有一个,那就是SAME。
SAME-S原则:surface要一致,不论标定还是实物抓取,我们的相机、镜头、以及被拍照的表面需要关系一致。
SAME-A原则:apply要一致,所有的数据应该在同样的坐标系环境进行运算。
SAME-M原则:move要一致,在你标定的时候,做了哪些用于映射的动作,在应用的时候,这些动作也要保持一致,或者将这些值添加到运算当中。
SAME-E原则:extent要一致,你使用的范围就是你标定的范围,超过这个标定范围,你就应该怀疑它的准确性。
接下来,对每个关键点进行详细的解释和案例分析
一个中心,旋转中心是否需要确定,取决于当前定位项目是否有用到旋转中心。常见的同轴、uvw(示教定位点)、振镜、多次拍照纠偏是不用旋转中心的,其他但凡与角度沾边都要有旋转中心的确认。
山不转水转
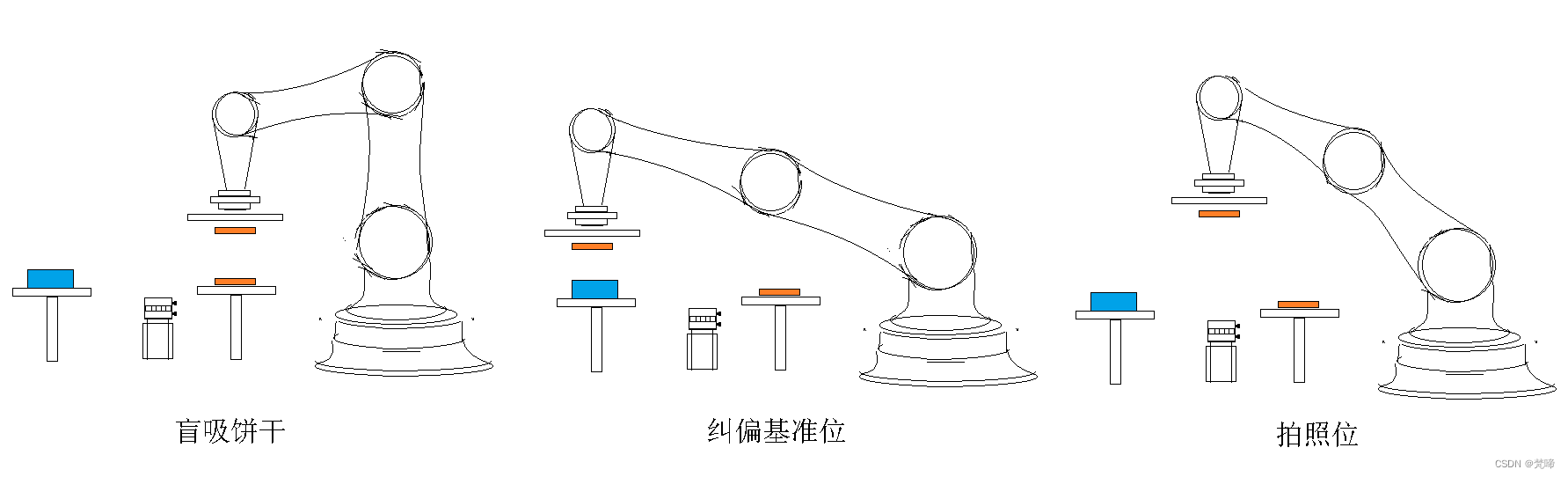
一个中心常见案例壹:一次饼干流水线动态抓取装盒的项目,李四使用机器手带真空吸板来抓取饼干,一个固定下相机拍照吸板中的饼干,另一边使用机械纠正的方法将饼干盒固定在平台上。我们每隔2秒就去流水线上盲吸饼干,靠真空压力判断如果吸到饼干就去下相机拍照,获得饼干位置,然后数据整合获取最终纠偏数据引导机械手去放料。接下来我们看怎么实现(准备过程和标定不进行叙述):
机械手动作图:
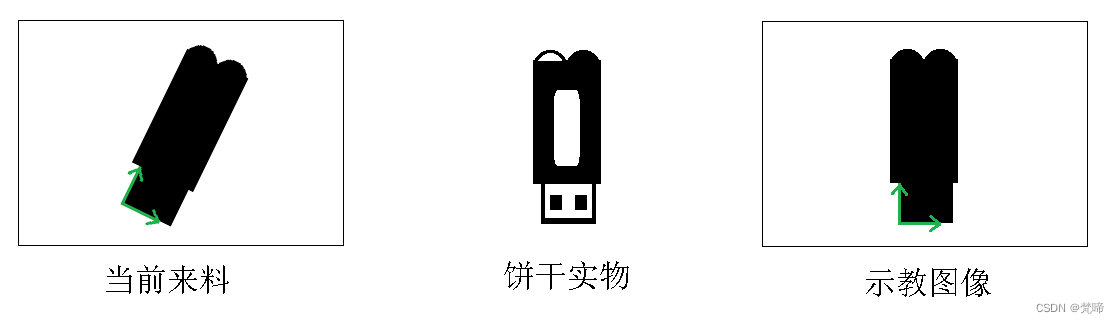
相机捕捉图:
理论图:
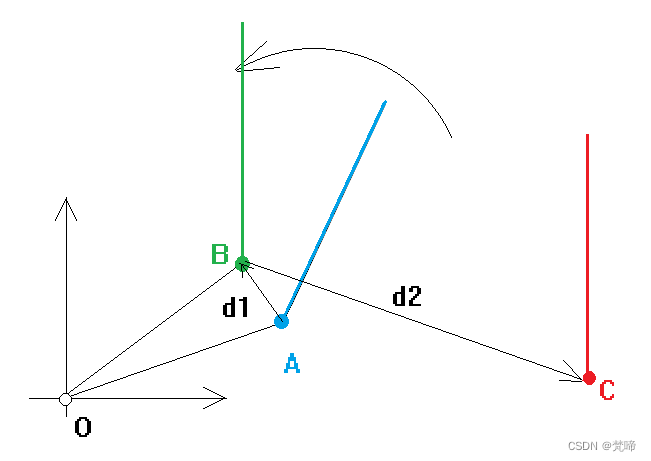
理论基础:首先我们将示C点示教为基准位置,我们可以默认为任何饼干只要保证姿态、位置与C相同就可以放置在饼干盒里。此时来料姿态为A与C姿态相差角度为a,如果直接将A平移到C那么就会因为姿态不同而无法放置,而且对姿态进行纠正后,又需要二次平移纠正。于是,我们把A围绕旋转中心O旋转,获得旋转后的的位置B,B与C姿态相同,只进行平移纠偏就可达到目的,我们只需要发送d2和夹角a即可。
实际操作:先将饼干放在饼干盒子,机械手将饼干吸住然后拿出来,移动到下相机上方。我们先进行一次定义,将机械手吸取饼干的位置视为机械手纠偏基准位(Xrb,Yrb)-RobotBase,将机械手在下相机上方的拍照位视为拍照位(Xrc,Yrc)-RobotCamera。一切就绪,相机拍照获得当前的饼干坐标(Xcb,Ycb,Rcb)-CookieBase,以及当前的旋转中心(Xc,Yc)-Center。此时我们的示教就已经结束,开始实际测试。流水线来料后,机械手盲吸移动到(Xrb,Yrb)位置拍照得到当前饼干坐标(Xcc,Ycc,Rcc)-CookieCurrent。开始计算:
首先我们获取角度(弧度)偏差:
//统一目标,以基准为目标进行移动,由基准值减去当前值。
//饼干角度偏差
OffsetR=Rcb-Rcc//CookieBase-CookieCurrent
//首先将饼干的姿态与饼干盒的姿态纠正到统一姿态,实际动作为饼干围绕机械手旋转中心旋转OffsetR
RotationX=(X
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 529
529











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









