







第一讲我们讲了许多算法的问题,帮助我们理解现场的动作工艺,不外乎就是谁绕谁转,怎么建立基准,这一期的讲解呢主要是针对问题的解决,算法再好不会去解决问题,那就是一个简单初级工程师,想要成为中级工程师么?我的宝藏都藏在后面的文件里的,奔向自动化吧。
以不变应万变
A原则常见案例壹:既然平移可以不用标定,那为什么旋转不行??其他公司友人来参观都有此一问,不得不再来找工程师。
方案组:阿四,我们换圆形Tray盘上料好不好?
李四:只要你开心,我必生死倾。
方案组:那你就需要示教很多拍照位基准咯?
李四:可能吧。
方案组:那每个拍照位置肯定也要做十二点标定嘜?
李四:也许吧。
方案组:你开发要多久,两天行不行,工期有点紧。
李四:大概吧。
方案组:你能不能整句实在话。
李四:你看我的眼睛,倒龙眉丹凤眼,得卧龙凤雏可安自动化。在你和我吹牛逼的时候,我已经运转内功把程序改好了。
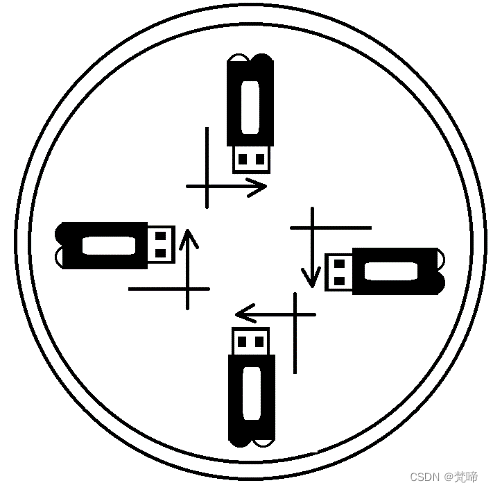
基础:机械手有一个坐标系称之为工具坐标系,可以在任意地方建立,并且工具坐标系与机械手上的相机相对位置固定。
所以以当前拍照位置工具坐标系尽心十二点标定,并进行示教,那么机械手去任何位置都可以以示教的数据获取偏移量。
方案组:也没干啥,应该就不用付钱了吧,而且你还撩我们采购。
总结:Tool坐标系在变,相机在Tool坐标系的相对位置不变
采购小姐姐分享的辣条真香。
糟糕是心动的感觉
A原则常见案例贰:机器人太贵,方案组又来作妖。
方案组:阿四,我有一事不知当讲不当讲。
李四:伤感情的事情,你一个人难过就好了。
方案组:机器人太贵了,我们想用uvw平台载着料盘纠偏,然后用定点气缸来回搬运。
李四:农村人想进城,城里人真会玩。
方案组:非塾弃辇啊。<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3855
3855











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









