






1)时变路网下A公司乳制品配送路径优化研究,旨在解决乳制品配送过程中存在的路线规划不合理、客户满意度低和配送成本高等问题。乳制品作为生活必需品,不仅有助于增强消费者的免疫力,也是商家提高销量的重要途径。由于乳制品具有保质期短、易变质、鲜活性的特点,对运输环境和时间较为敏感。随着消费者健康观念的增强,他们对乳制品的配送时效性和鲜活性等个性化需求愈加突出,这使得乳制品物流配送成本居高不下。另一方面,交通路网的不断变化会直接影响车辆的行驶时间,进而影响乳制品的配送时效。因此,企业在动态路网环境下进行配送路线规划显得尤为重要。
本研究首先对A公司乳制品配送存在的问题进行了详细的分析。通过文献梳理和实地调研,发现A公司在配送路线规划方面存在以下主要问题:路线规划不合理、客户满意度低、配送成本高以及未考虑时变路网因素。这些问题不仅影响了公司的运营效率,还导致了客户满意度的下降。为了深入分析这些问题,本研究结合时变路网和客户满意度的相关文献,对A公司乳制品配送的具体情况进行详细剖析,明确了优化配送路径的必要性和紧迫性。
(2)针对上述问题,本研究提出了一种总成本最小的路径优化模型,充分考虑了时变路网因素和客户满意度。具体而言,模型中考虑了道路类型、时间满意度和乳制品完好满意度等因素对客户满意度的影响。道路类型因素包括道路的拥堵程度、限速规定和路况等,这些因素会直接影响车辆的行驶时间和成本。时间满意度是指配送时间是否符合客户的期望,过早或过晚的配送都会影响客户的满意度。乳制品完好满意度则是指在运输过程中乳制品的质量是否得到了保证,这直接关系到客户的消费体验。
模型的目标是使总成本最小化,总成本包括车辆固定成本、车辆运输成本、时间窗惩罚成本和制冷成本。车辆固定成本是指每次配送任务中固定的车辆使用费用,车辆运输成本包括燃油费、维修费和驾驶员工资等。时间窗惩罚成本是指因未能在客户指定的时间窗口内完成配送而产生的罚款。制冷成本则是为了保证乳制品在运输过程中的鲜活性而产生的费用。通过综合考虑这些成本因素,模型能够更全面地反映实际配送过程中的各种开支,从而为优化配送路径提供科学依据。
(3)为了求解上述路径优化模型,本研究在粒子群算法(Particle Swarm Optimization, PSO)的基础上,加入了2-opt和relocate局部搜索算子对算法进行改进。2-opt算子通过交换路径中的两个节点,寻找更优的路径组合,relocate算子则通过移动路径中的一个节点到另一个位置,进一步优化路径。这两种局部搜索算子的引入,显著提高了粒子群算法的搜索能力和求解效率。通过改进后的粒子群算法,本研究对静态和时变两种路网环境下的配送方案进行了求解,并对两种方案下的车辆运输距离和配送成本进行了对比分析。
实验结果显示,时变路网下的配送方案在配送成本方面比静态路网下的配送方案降低了12.38%,在客户满意度方面提高了24.99%。这一结果验证了改进粒子群算法和构建模型的有效性。具体而言,时变路网下的配送方案不仅能够更好地适应交通状况的变化,还能有效减少不必要的等待时间和绕行距离,从而降低了运输成本。同时,通过优化配送时间窗口和保证乳制品的鲜活性,客户满意度得到了显著提升。
% 改进粒子群算法求解路径优化模型
function [best_path, best_cost] = improved_pso(path_matrix, cost_matrix, time_window, max_iter, num_particles)
% path_matrix: 路径矩阵
% cost_matrix: 成本矩阵
% time_window: 时间窗口
% max_iter: 最大迭代次数
% num_particles: 粒子数量
% 初始化粒子群
particles = initialize_particles(num_particles, length(path_matrix));
velocities = zeros(size(particles));
personal_best = particles;
personal_best_cost = inf * ones(size(particles, 1), 1);
% 全局最优解初始化
global_best = particles(1, :);
global_best_cost = inf;
% 迭代优化
for iter = 1:max_iter
for i = 1:num_particles
% 计算当前粒子的成本
current_cost = calculate_cost(particles(i, :), path_matrix, cost_matrix, time_window);
% 更新个人最优解
if current_cost < personal_best_cost(i)
personal_best(i, :) = particles(i, :);
personal_best_cost(i) = current_cost;
end
% 更新全局最优解
if current_cost < global_best_cost
global_best = particles(i, :);
global_best_cost = current_cost;
end
end
% 更新粒子的速度和位置
for i = 1:num_particles
velocities(i, :) = update_velocity(velocities(i, :), particles(i, :), personal_best(i, :), global_best);
particles(i, :) = update_position(particles(i, :), velocities(i, :));
% 应用2-opt*局部搜索
particles(i, :) = apply_2opt_star(particles(i, :), path_matrix, cost_matrix, time_window);
% 应用relocate局部搜索
particles(i, :) = apply_relocate(particles(i, :), path_matrix, cost_matrix, time_window);
end
end
% 返回最优路径和成本
best_path = global_best;
best_cost = global_best_cost;
end
% 初始化粒子群
function [particles] = initialize_particles(num_particles, num_cities)
particles = zeros(num_particles, num_cities);
for i = 1:num_particles
particles(i, :) = randperm(num_cities);
end
end
% 计算路径成本
function [cost] = calculate_cost(path, path_matrix, cost_matrix, time_window)
cost = 0;
for i = 1:length(path) - 1
cost = cost + cost_matrix(path(i), path(i+1));
end
% 添加时间窗惩罚成本
for i = 1:length(path)
if path(i) > time_window(i)
cost = cost + (path(i) - time_window(i)) * 10; % 惩罚系数
end
end
end
% 更新粒子速度
function [velocity] = update_velocity(velocity, particle, personal_best, global_best)
inertia_weight = 0.7;
cognitive_weight = 1.5;
social_weight = 1.5;
r1 = rand;
r2 = rand;
velocity = inertia_weight * velocity + ...
cognitive_weight * r1 * (personal_best - particle) + ...
social_weight * r2 * (global_best - particle);
end
% 更新粒子位置
function [position] = update_position(position, velocity)
position = position + round(velocity);
% 确保位置在有效范围内
position(position < 1) = 1;
position(position > length(position)) = length(position);
end
% 应用2-opt*局部搜索
function [path] = apply_2opt_star(path, path_matrix, cost_matrix, time_window)
n = length(path);
for i = 1:n-1
for j = i+1:n
new_path = path;
new_path(i:j) = fliplr(new_path(i:j));
if calculate_cost(new_path, path_matrix, cost_matrix, time_window) < calculate_cost(path, path_matrix, cost_matrix, time_window)
path = new_path;
end
end
end
end
% 应用relocate局部搜索
function [path] = apply_relocate(path, path_matrix, cost_matrix, time_window)
n = length(path);
for i = 1:n
for j = 1:n
if i ~= j
new_path = path;
temp = new_path(i);
new_path(i) = [];
new_path = [new_path(1:j-1), temp, new_path(j:end)];
if calculate_cost(new_path, path_matrix, cost_matrix, time_window) < calculate_cost(path, path_matrix, cost_matrix, time_window)
path = new_path;
end
end
end
end
end
path_matrix = [0 10 15 20; 10 0 35 25; 15 35 0 30; 20 25 30 0]; % 路径矩阵
cost_matrix = [0 2 3 4; 2 0 5 6; 3 5 0 7; 4 6 7 0]; % 成本矩阵
time_window = [10 20 30 40]; % 时间窗口
max_iter = 100; % 最大迭代次数
num_particles = 50; % 粒子数量
% 进行路径优化
[best_path, best_cost] = improved_pso(path_matrix, cost_matrix, time_window, max_iter, num_particles);
% 显示最优路径和成本
disp('Best Path:');
disp(best_path);
disp('Best Cost:');
disp(best_cost);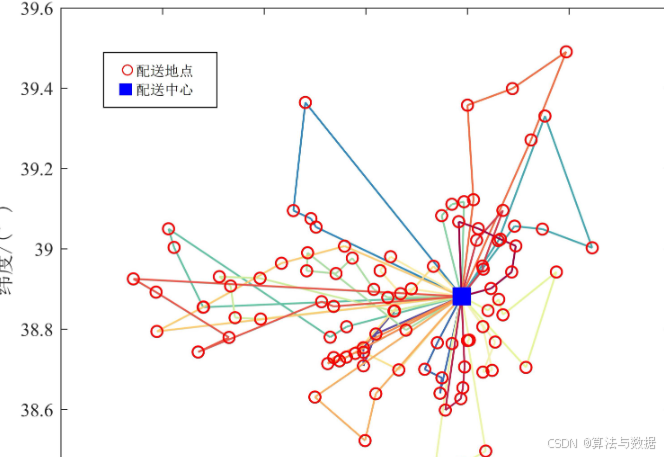
有问题可以评论+私信


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









