







原文出处:http://blog.csdn.NET/renshengrumenglibing/article/details/8604245
激光雷达获取的信息是和周围物体之间的距离信息,在移动机器人尤其是自主移动机器人领域具有非常广泛的应用,那我们就从移动机器人的自主导航开始聊吧。
移动机器人导航是指移动机器人依靠传感器在特定环境中,按时间最优、路径最短或能耗最低等准则实现从起始位置到目标位置的无碰撞运动。
传统的移动机器人导航问题包含三大要素:地图创建、定位和运动控制,通过三大要素,解决三个基本问题:我在哪里?我要去哪里?如何去?
机器人定位的目的是回答“我在什么地方?”这个基本的问题。
激光雷达采集数据之后通过一定的运算可以准确的计算出当前的绝对位置或者相对位置,那么就可以知道机器人在什么位置,当然有时地图的创建和定位是同步进行的,例如SLAM算法(Simultaneous localization and mapping),此时可以看成是一个探索问题。
说了这么多,无非是想说激光雷达是多么的有用,多么的强大,而完成这些功能首先还是应该获取激光雷达数据的特征,这就回到了特征提取这一主题上。
特征提取主要分为两个步骤:区域分割和特征提取。区域分割阶段主要完成特征模式的分类及识别确定,即确定特征属于哪类模式,如直线,圆弧等,并确定属于该特征模式的区域及区域内的激光数据点集。特征提取阶段主要完成各类特征模式参数的确定以及特征点的提取。
一、区域分割
对于每一帧距离数据,首先把激光扫描点分割成不同的区块。如果连续两个扫描点的距离小于一个阈值,这两个扫描点属于同一个区块。如果连续两个扫描点的距离大于一个阈值,数据帧就从这个地方分割开。最后把一帧距离数据分割成几个区块。分割的区块表示为 Ri(i=1,…,Q,其中 Q 是分割的区块数),每一个区块包含 Ni个点。由于扫描点的分布并不是均匀的,通常情况下,离传感器近的扫描点密度大一些,而远离传感器的扫描点密度小一些。所以进行距离数据分割时,应用自适应变阈值分割方法。例如当某个扫描点离传感器中心的距离为 D 时,分割阈值选择为 d,当扫描点离传感器中心的距离为3D 时,阈值选择为 3d。除此之外,也可以选用其它的线性或非线性函数来定义自适应分割阈值。总之,在不同的扫描点选用不同的分割阈值,以求距离数据的分割区块能够更好地与实际环境特征模型一致。如果激光的有效测距距离为 10 米,并且角度分辨率为 0.25度,则相邻扫描点之间的距离最小为:2×10m×sin(0.125°)=0.0436m。根据该值可以设定合适的分隔阈值。
UTM-30LX 有效距离60m 角度分辨率0.25度,,但是一般对于室内应用一般不会超过10m
a、计算相邻两个点之间的距离Dj
b、判断Dj和阈值delta的关系
如果Dj,大于闽值delta,则认为点(x,y)是两个区域的分割点,阈值的选择一般按照动态阈值的方式
c、(可选)判断每个区域内的数据点的个数,如果某个区域包含数据点的个数小于等于三个,那么该区域被视为噪声区域,舍弃这些噪声点
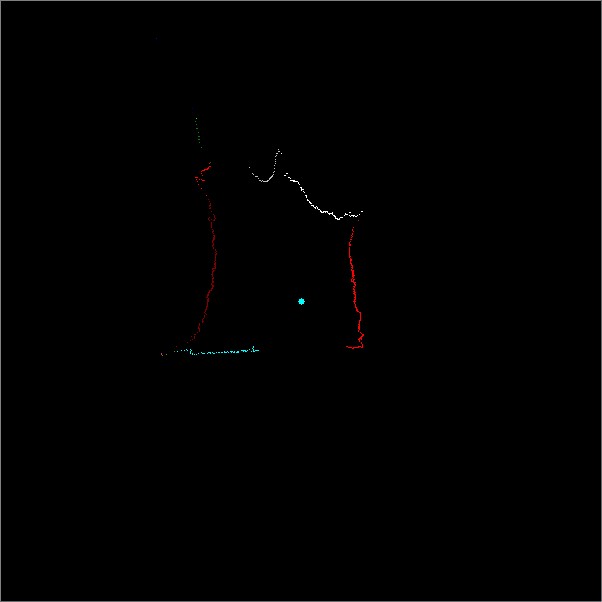
//激光雷达区域分割效果,不同的区域用不同的颜色分割(同一种颜色并不代表在同一区域,只是颜色有限,几种颜色在循环使用)
二、特征提取
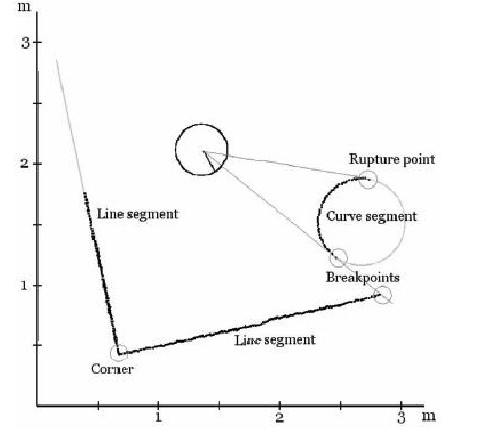
激光雷达扫描的数据中,几个重要的特征:撕裂点(breakPoint)、角点(Corner)、直线、圆弧等。
区域分割实际上就已经找到了数据中的撕裂点。折线也可以当成是一个特征,是直线加角点构成的特征。
直线作为一个很关键的特征在很多的论文中都是提取的关键,鉴于折线的是普遍存在的,那么角点的检测同样是一个难以回避的问题。那么我们就先提取角点,将所有的折线都打断成直线和角点。
1、角点检测
假设有一条折线,只有单个角点,那么我们可以采用多变形拟合方式确定角点的位置。首先将区域内的点拟合成一条直线,然后找出离直线最远的点,这个距离如果大于某个阈值,则可以认为是折线,而该点就是折线的分割点,否者就是一条直线。
当某区域含有多个角点时,就需要采用迭代或者递归的方式,不断的寻找角点-->拆分成两段,循环进行,直到每个区域都不存在角点。
//多边形拟合的方式确定是否存在角点,以及角点的位置
以上只能检测具有单个角点的折线,任意个角点的折线采用了递归的方式,想提速的可以自己转化为迭代的方式实现。
2、直线拟合
如果某区域不存在角点,并且点数据比较大,那么一般都是直线,(不是绝对,直线的判定方法后面的博客再写)
直线拟合的原理比较简单,实际就是一个最小二乘法,或者为了提高拟合的精度可以采用加权的最下二乘法,这里采用的是加权最小二乘。
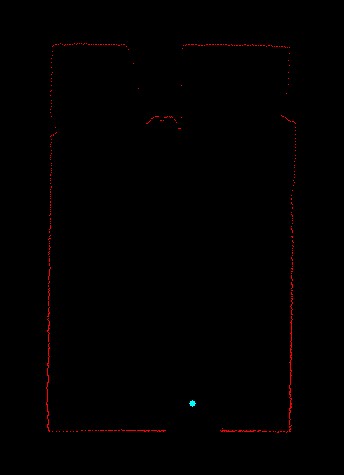
//原始数据图 蓝点是雷达的位置
//拟合直线和角点图,粗点是角点,粗实线是拟合出的直线
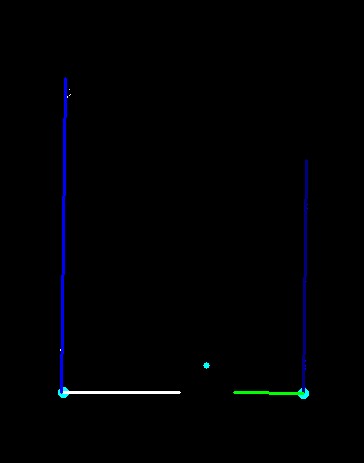
由于只对点数比价多的直线进行了拟合,上部分的直线并为画出,实际上点数比较少的直线误差也会大,并不是关键的特征。
源码下载:http://download.csdn.net/detail/renshengrumenglibing/5076599















 4358
4358

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









