







 本文详细介绍了自适应巡航系统(ACC)的工作原理,包括其如何通过雷达和摄像头感知目标车,自动调节车速以保持安全距离。同时,文章列举了ACC系统的主要组成部分,如Sensor、ECU、ESP等,并对长距离雷达的性能进行了说明。
本文详细介绍了自适应巡航系统(ACC)的工作原理,包括其如何通过雷达和摄像头感知目标车,自动调节车速以保持安全距离。同时,文章列举了ACC系统的主要组成部分,如Sensor、ECU、ESP等,并对长距离雷达的性能进行了说明。
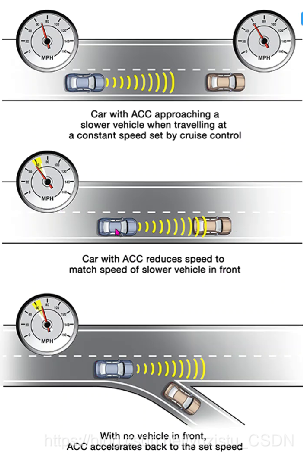
一、什么是自适应巡航系统?
假设本车与目标车处于同一车道线,并且目标车行驶速度低于本车巡航设置速度,那么本车行驶至设定Gap后自动调节车速与目标车速度一致行驶。若目标车丢失后,还原至巡航设定速度(常规CC模式)
二、ACC系统组成
Sensor:感知模块,雷达/摄像头
ECU:发动机控制模块
ESP:ESC提供制动减速度
HMI:驾驶员与车辆信息交互
throttle:电子节气门,PID调节PWM波占空比调整节气门开度
Sensor:车辆状态,主缸压力或者轮速传感器,模拟量信号
Transmission-shift:变速箱档位,前进挡/后退档?
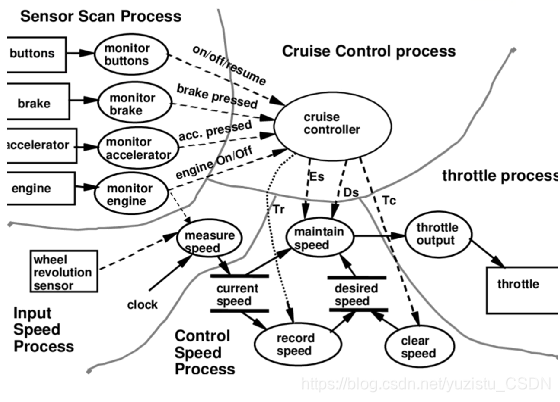
常规CC控制过程:Sensor处理→输入速度→速度控制→电子节气门调整
三、Sensor介绍
长距离雷达,MRR/LRR,77GHz雷达,探测距离一般在160m到200m之间,ABCD四大零部件巨头产品见https://download.csdn.net/download/yuzistu_CSDN/12699897,Conti雷达做的比较好
四、执行器详细介绍
ESP,电子节气门/扭矩控制放在学习笔记(三)具体介绍
https://blog.csdn.net/yuzistu_CSDN/article/details/108027440

















 6526
6526

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









