







 本文详细介绍了如何DIY一台四旋翼穿越机,从设计机架、飞控板到试飞的全过程。通过solidworks设计机架,采用2mm层板材料,激光切割制作,再结合STM32F103和MPU6050设计飞控板。文中还涉及了飞控原理和PID控制,分享了调试和飞行体验。
本文详细介绍了如何DIY一台四旋翼穿越机,从设计机架、飞控板到试飞的全过程。通过solidworks设计机架,采用2mm层板材料,激光切割制作,再结合STM32F103和MPU6050设计飞控板。文中还涉及了飞控原理和PID控制,分享了调试和飞行体验。
今天教教大家怎么真正意义上的DIY四旋翼飞行器,我将从机架入手DIY穿越机。
下面是我的步骤:
1、设计机架三维图纸;
2、导出机架的二维图纸并做修改;
3、设计飞控板;
4、试飞。
step 1. 我们先设计穿越机的三维图纸,我这里使用的是solidworks软件设计的,有很多学机械的学生画了这么多年的图纸却也没有运用过。计算机辅助设计,设计出来的图纸是可以用于实际的生产的。设计小零件,在装配图上看装配效果。莫问如何就能设计出这个形状,飞机看多了,胸中自有丘壑。工具软件在学校多学学,艺多不压身。这个世界上没有什么困难能阻挡勤劳的脑子和勤劳的双手。首先还是要确定使用材料的,使用的2mm厚的层板。
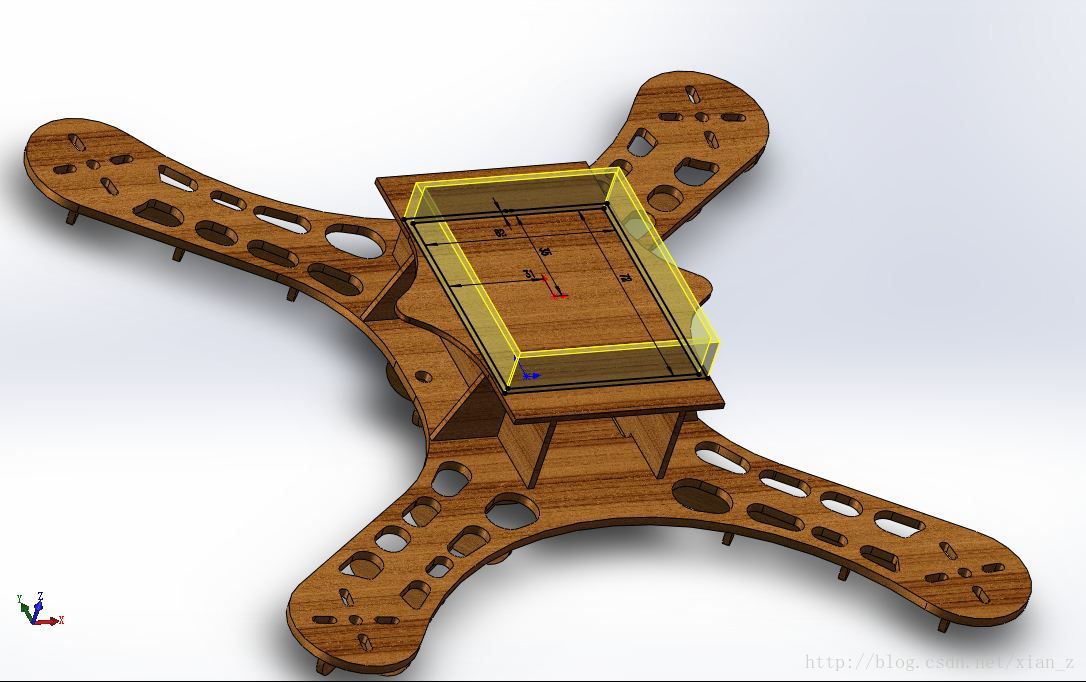
当然,在画图前要先确定飞机的轴距,用多大的螺旋桨(桨长了会打到中间的电池和控制板的),鄙人设计的参数是对角轴距是280mm,选用的是6040的桨。所以主要设计的还是底下的那块主要的板,其余的都是一些为了放置电池飞控板的构件和加强筋。下面这张图给出了我的设计思路,可供参考。打辅助线是为了更好的设计。
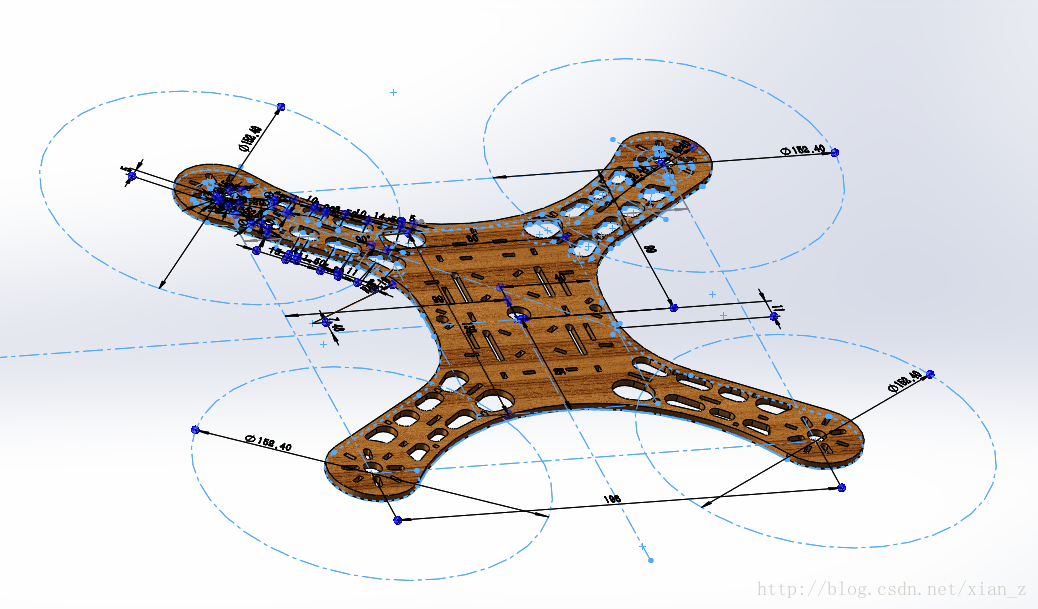
然后设计出加强筋,打孔是最后设计的,在起不到加强的地方镂空减少机架的质量。最后使用软件设计出来的效果如下图:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















04-23
 7345
7345
7345
03-11
1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









