






1小孔成像模型
墨子就记录了小孔成像是倒立的。这从几何光学的角度是很好理解的:光沿直线传播,上方和下方的光线交叉,导致在成像平面位置互换。
1.1小孔的大小有什么影响?
小孔越大,进光量变大了,但是成像平面上一个点来源于物体的多个点,相当于画画的笔触越粗,所成的像也越模糊。
但是小孔越小成像就越清晰吗?先不说技术上无法实现,孔越小,光的衍射diffraction现象会越明显,光要越过障碍物,会出现水波纹:

1.2小孔的形状有什么影响?
无论小孔什么形状,物体的每个位置会穿过小孔,在平面投下小孔形状的图案。但结果小孔的物体有无数道光线,所以最终成像来看没什么差异。正如前面的比方,改变小孔的形状,也可以理解为笔触的不同。
2坐标变换
2.1世界坐标到相机坐标
相机坐标系的原点是光心。世界坐标系到相机坐标系,是一个仿射变换:旋转+平移。
2.2相机坐标到传感器坐标
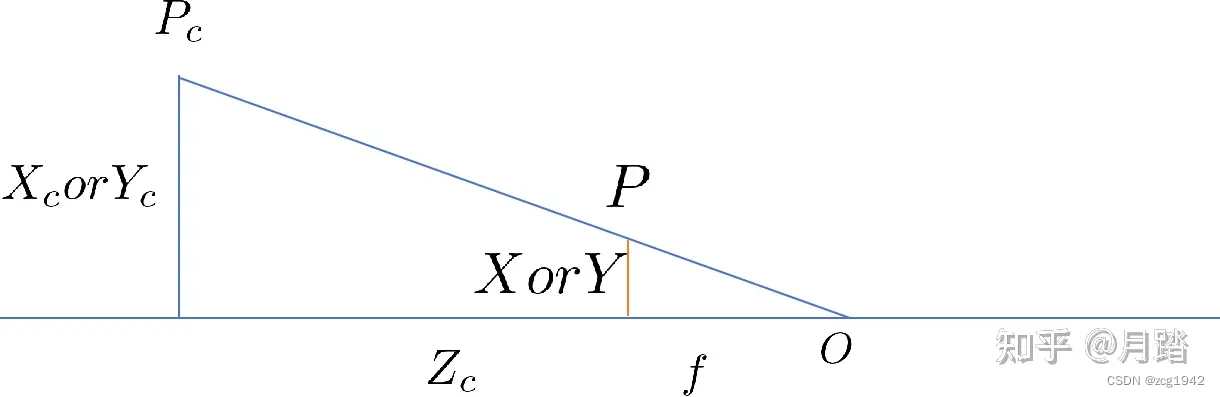
图像坐标系是以传感器sensor为原点的,所以相机坐标系到图像坐标系就是一个缩放变换。
由三角形相似可以得到,缩小的尺度就是焦距f和物距的比值。
2.3传感器坐标到像素坐标
像素坐标是离散化的,它是以传感器坐标以像素长宽为单位得到的。因为图像一般以左上角为原点,所以传感器坐标到像素坐标还需要一次平移。
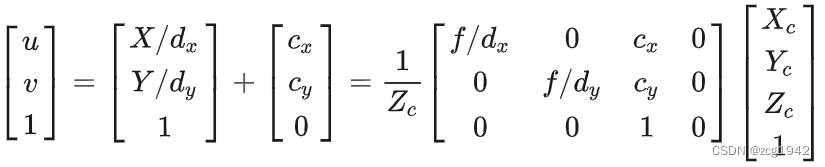
2.4内参和外参
前面从世界坐标系到像素坐标系经历了三次坐标变换。第一次涉及到的的平移和旋转构成了外参矩阵,后两次构成了内参矩阵。

外参有6个参数,3个控制旋转,3个控制平移。
内参有10个参数,其中五个是,分别表示焦距,像素宽度,像素高度,图像宽度,图像高度。另外五个控制畸变。
3畸变
3.1近大远小
在相机坐标系到传感器坐标系转换中,涉及到了焦距和物距:

由上面的坐标变换公式可以看到, 成像大小与物距成反比,焦距成正比。这就可以解释透视关系中的近大远小。
那么是不是焦距和物距等比例同时放大缩小,成像就不变?理论上是这样的,但是物体不是一个平面,不同位置到镜头的距离是不一样的,没办法保证所有的点同时满足等比例变换,所以就会产生透视畸变:前景处被放大,背景处被缩小。
这就可以解释为什么拍特写摄影师都推荐用长焦。虽然剧烈近一点用短焦也可以拍出差不多大的像,但是因为焦距小,物距的微小变化就会被放大,导致畸变严重。

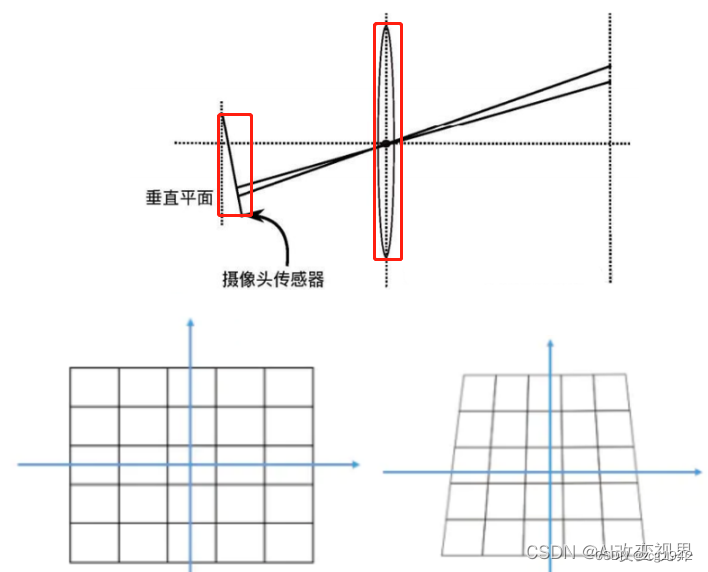
3.2切向畸变
借鉴近大远小的分析,即便是平面物体,当平面和镜头不平行时,就产生了切向Tangential畸变。
3.3径向畸变
径向是指半径的方向。因为镜头制作工艺,图像中心和边缘的折射有差异,所以产生了径向畸变。径向畸变又分为桶形畸变和枕形畸变:
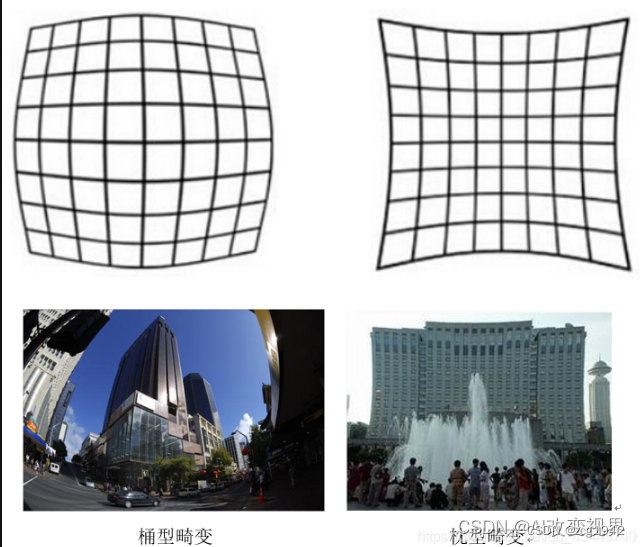
很显然,径向畸变是关于半径r的函数,所以一般建模为r的指数多项式。
reference:
1. https://zhuanlan.zhihu.com/p/95059112
2. https://www.zhihu.com/question/363078768
3. Aachen Day-Night dataset,intrinsic.txtBenchmarking Long-term Visual Localization















 6万+
6万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









