







目录
一、VM虚拟机安装ubuntu18.04
1、VMware安装
选择路径时建议不要安装在C盘
2、新建虚拟机
点击创建新的虚拟机

会出现安装向导

点击下一步

点击浏览

选择ubuntu-18.04.5,点下一步
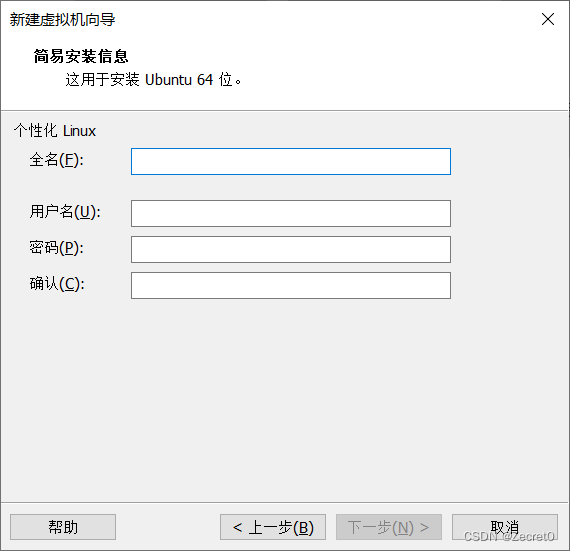
自行设置全名、用户名(建议设置小写英文,全名和用户名一样就可以)和密码,密码需要大于等于6位(比如123456就可以)。设置完成后点下一步

设定虚拟机名称。注意安装位置不要选C盘,点击浏览,可以在其他盘(比如D盘)下面创建一个文件夹安装虚拟机。点击下一步

磁盘大小默认是20G,后续安装软件可能需要用更多空间,所以最好选40G。设定好后点击下一步。

点击自定义硬件

后续可能需要在虚拟机上跑仿真,所以更改内存为4GB

在显示器下,确定打开加速3D图形,也是为了之后使用图形软件需要。
设定好后点击关闭,在点击完成,虚拟机就创建完毕了。VM软件会自动开启虚拟机,第一次开启系统会自动安装一些软件,耐心等待安装完成就可以。
安装完成后你会看到之前设置的用户名,点击输入之前设置的密码就可以进入系统了。
二、Ubuntu系统配置
1、更改软件安装源
Linux默认的软件安装源是在国外,我们需要改成国内的源,不然下载速度会很慢。
界面右下角9个点点开,点击
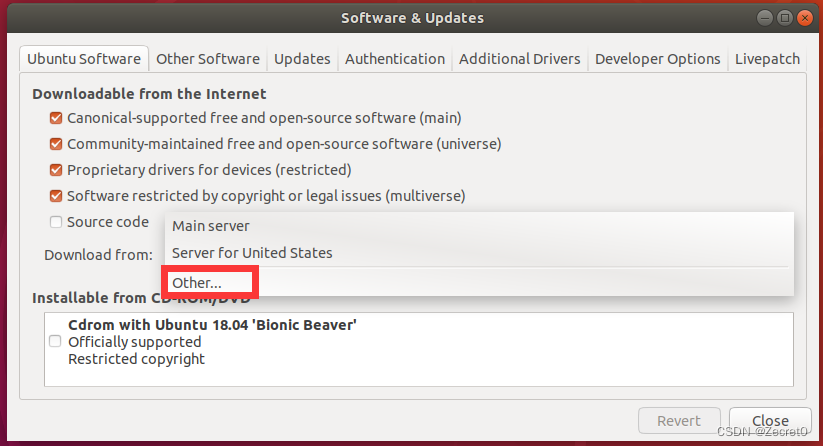
点击Download from,选择Other…
选择阿里服务器

选择后需要输入一下密码

更换好之后close关闭,会跳出一个框,选reload,等待它更新一会儿(会等待比较久)。
2、安装中文输入法

点击设置,到Region&Language页面

点击框框的位置,第一次点开系统会自动检测更新

点击install,安装完成后点击:

找到简体中文,勾选,点击Apply开始安装


完成后登出登入一下系统
回到之前的界面,点击加号


点击Chinese

选择拼音输入法,然后登出登入一下系统就OK了。
也可以把系统语言改成中文,点击Language

选择汉语

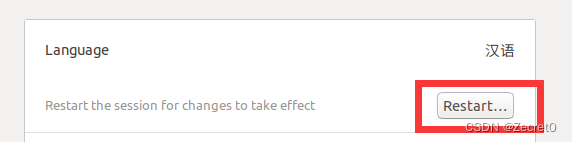
然后重新登入登出一下系统,就可以了。
三、PX4环境搭建
PX4官方文档:https://docs.px4.io/master/zh/
1、安装git
快捷键Ctrl+alt+T调出终端,输入下述指令后回车
sudo apt-get install git
输入你的密码,如果后续询问输入 y回车确定安装,就会开始安装程序了。
查看版本号 git --version

出现版本号说明安装成功
2、下载px4源码
git clone https://github.com/PX4/PX4-Autopilot.git --recursive(需要科学上网)
(如果网络不好的话可以分步执行,用如下命令:
git clone GitHub - PX4/PX4-Autopilot: PX4 Autopilot Software
cd PX4-Autopilot/
git submodule update --init --recursive)
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh
(中间出错,执行指令
python3 -m pip install --upgrade pip
python3 -m pip install --upgrade Pillow
后重新执行不报错)
如果过程中有安装失败的地方,可以再用:bash ./PX4-Autopilot/Tools/setup/ubuntu.sh --fix-missing 更新一下
完成后重启一下系统
3、安装ROS
按照melodic/Installation/Ubuntu - ROS Wiki上的步骤进行安装
注意安装完整版(sudo apt install ros-melodic-desktop-full)
4、安装MAVROS
sudo apt-get install ros-melodic-mavros ros-melodic-mavros-extras
5、安装QGC
参考链接:Download and Install · QGroundControl User Guide
首先在命令行输入下述指令:
sudo usermod -a -G dialout $USER
sudo apt-get remove modemmanager -y
sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y
sudo apt install libqt5gui5 -y
然后登出登入系统
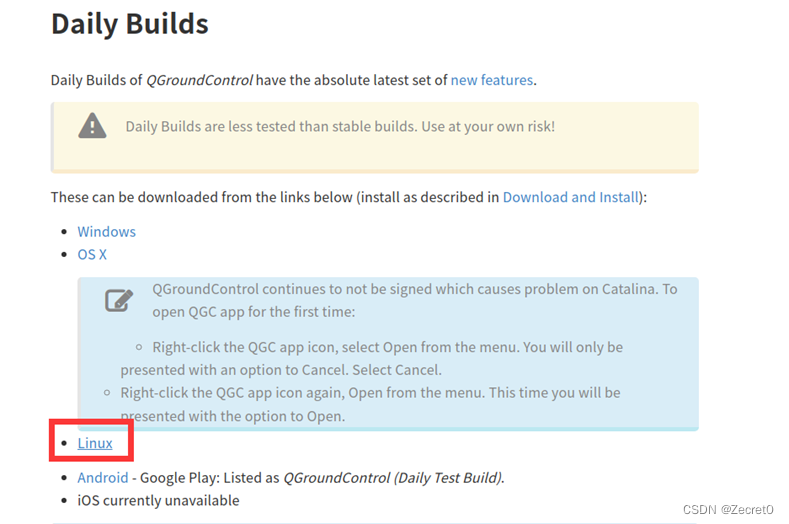
到网站Daily Builds · QGroundControl User Guide
点击下载linux版本
下载完成后在终端输入指令
chmod +x ./QGroundControl.AppImage
然后双击QGroundControl.AppImage  ,就可以打开QGC
,就可以打开QGC
6、仿真测试
进入你下载的PX4-Autopilot文件夹内,比如我直接安装在主目录下就直接cd PX4-Autopilot/
然后输入 make px4_sitl_default gazebo
一切顺利会看到如下界面:

双击开启QGC地面站
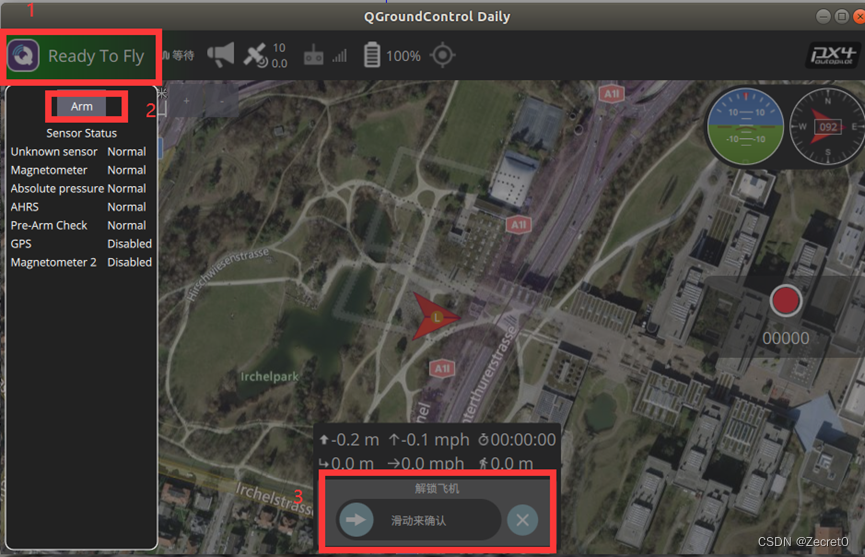
滑动解锁飞机,就可以开始控制飞机飞行
比如在控制台输入 commander takeoff 回车,启动飞机,可以看到gazebo中飞机起飞离开地面


也可以在QGC中选定某点,点击选择前往位置,然后滑动确认

可以观察到飞机的飞行前往指定位置
等等还有其他指令可以自行搜索尝试,如果观察到这些指令能顺利完成那么整个无人机的仿真环境就搭建好了。
四、其他工具安装
1、VScode安装
网站:https://code.visualstudio.com/

下载完成后安装即可














 779
779











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









