







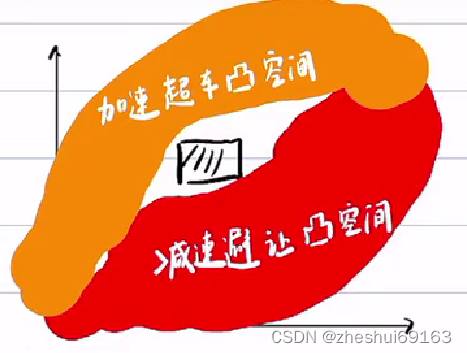
速度规划和路径规划类似,需要选取凸空间,加速超越障碍物/减速避障这个障碍物,但是加速减速取中间值是不可以的,会直接撞上去
如何选择加速/减速,就是一个决策
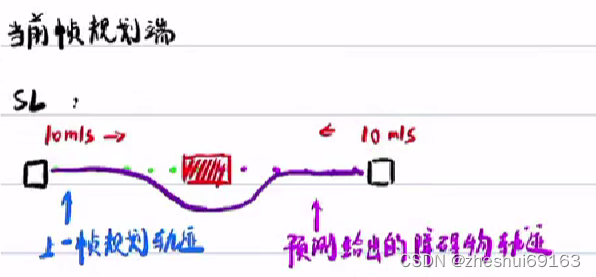
路径规划的自然坐标系的坐标轴是参考线
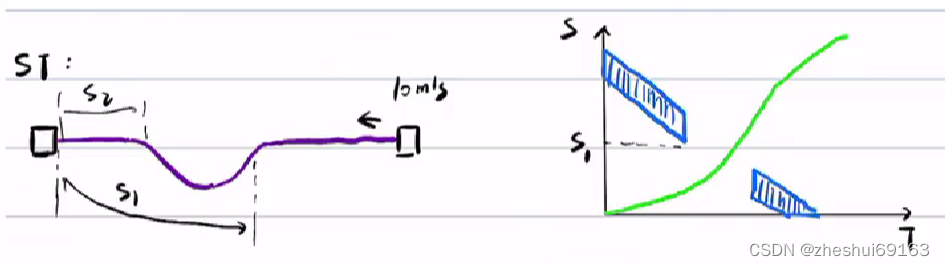
速度…是路径规划的结果path,生成ST图
这个很好理解嘛:路径规划是想按照参考线走,所以s轴选他,而速度规划是想按照path走,所以s轴选他
1.动态障碍物投影frenet坐标,生成ST图
ST图画法
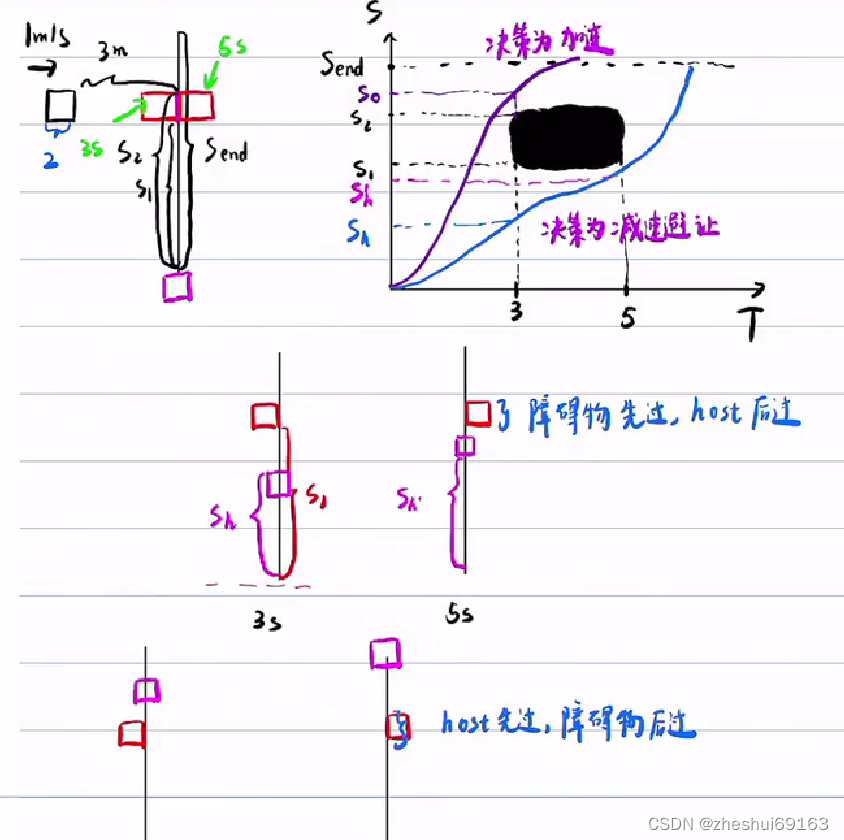
这个方法特别依赖于对障碍物的预测,前面图这样话是因为已经假设车辆匀速直线运动,这样在ST图中障碍物的所占位置就可以被画出,但实际上障碍物怎么走是不知道的,它可能加/减速,还可能拐弯
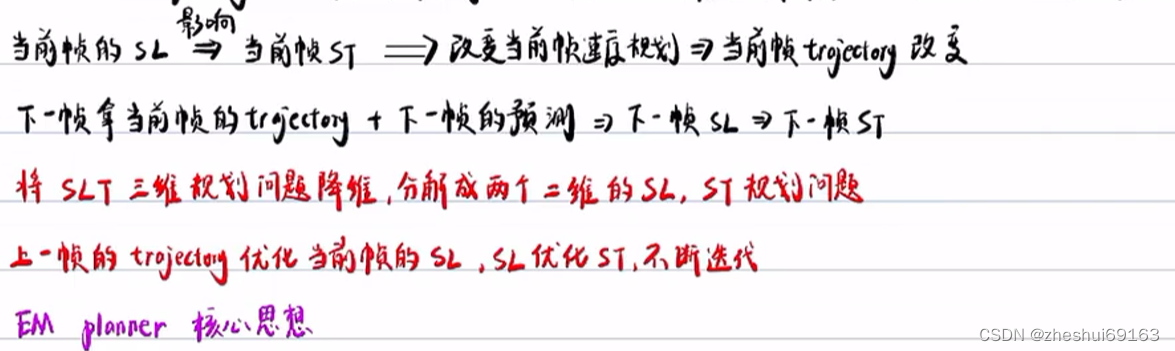
SL ST如何迭代求解
1)若维持当前状态会发生碰撞-但直接改变速度就可以避免碰撞,如之前的情况所示,直接确定加速/减速即可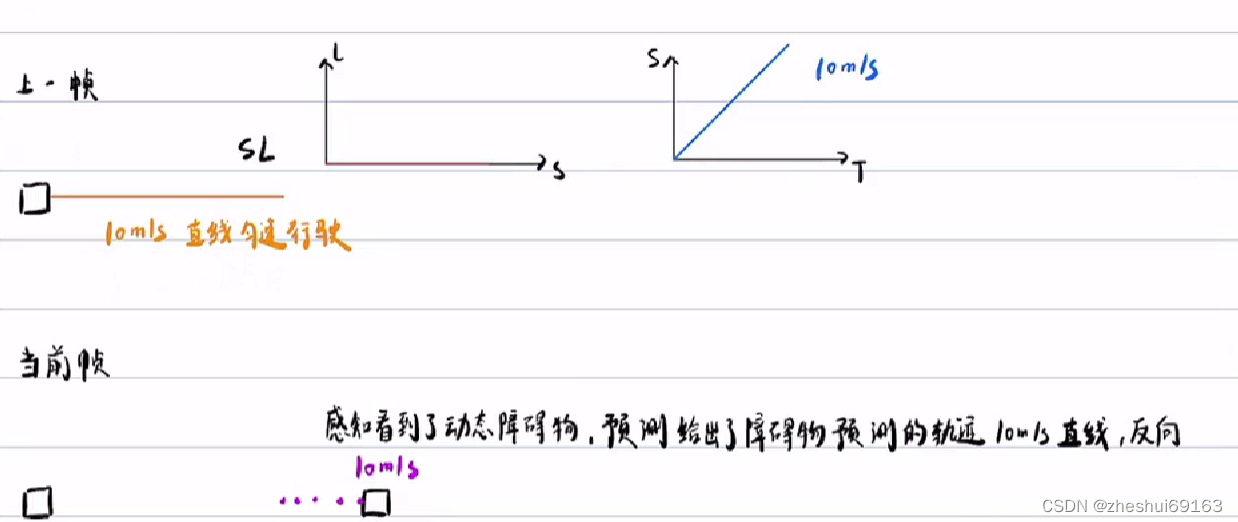
2)速度无论怎么规划都会碰撞,则要路径重新规划
除非速度倒着走,如下:
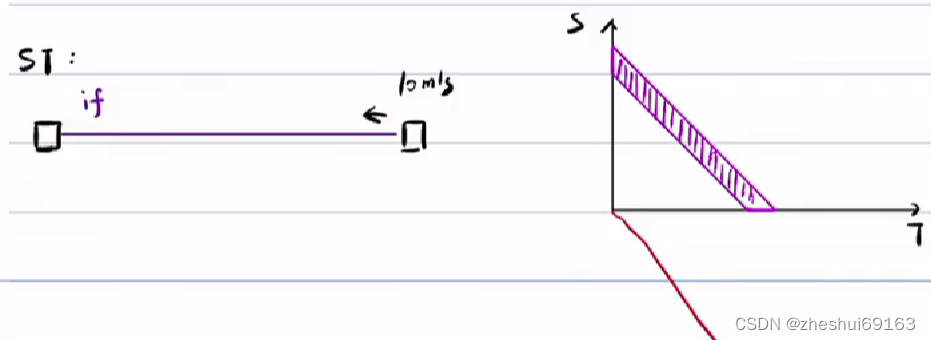
则路径规划结果如下:【采用预测碰撞位置 构建虚拟碰撞物,再轨迹规划】
轨迹规划对速度规划规划的影响。如果速度规划成绕一下,则速度规划的ST图像如下,这样就有解释了(补充:老王说他这里画错了,即使障碍物到达拐点,还是需要投影的,只是这时即使自车和obs在同一个s下,对应的l也不同。但我觉得像下面这样画就很清晰!)
3)在整个运动过程中他车也可能发生变化,则轨迹又得重新规划(因为预估的碰撞点不一样啦,虚拟障碍物位置也不一样了);则相应的ST也会变化【因为障碍物位置变了解空间也变了】,所以速度规划结构也变了

扩展:
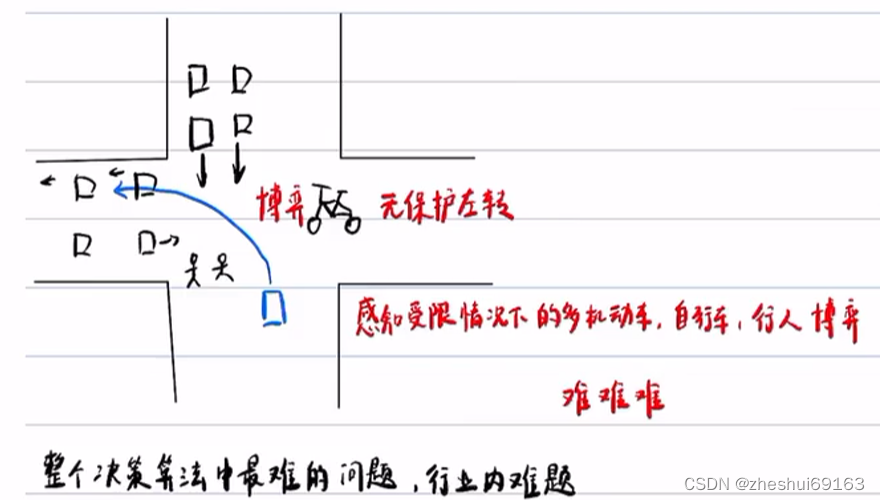
1.博弈问题(我往左开,obs也左开就很容易撞,我再右它也右),车辆状态很难预测,和它车距离很近,他车预测结果可能急剧变化
博弈时候,自车也不能直接停下来,因为有还有车在我后面排着。如汇入问题
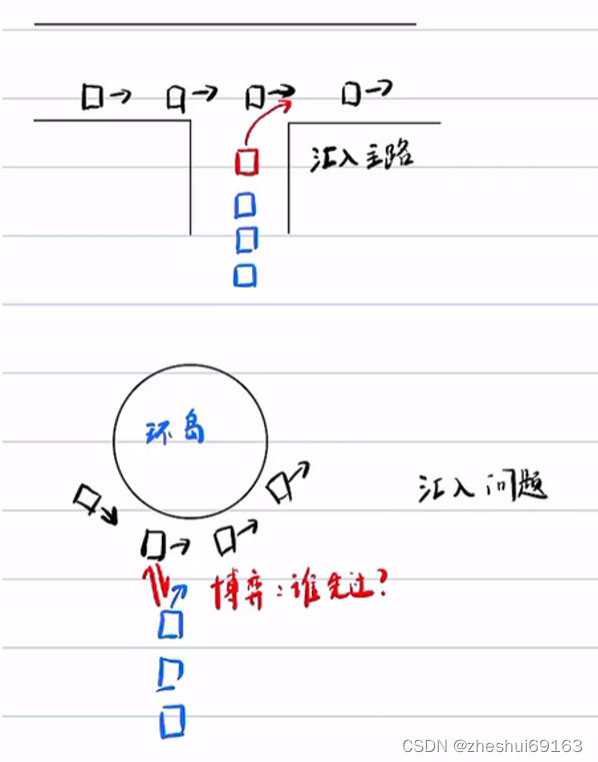
eg2:十字路口直行和左转车辆谁先过的博弈问题















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









