







速度规划
#预测老王就直接 维持当前的加速度
Apollo 1.5 EM planner:先决策确定凸空间,再规划。SL,ST解耦(先路径规划-在速度规划-依次迭代)
Apollo 2.5 加入lattice planner
Apollo 3.5 大幅修改EM planner,变成public road planner(取消了SL,ST迭代机制,SL只管静态障碍物,ST只管动态障碍物),加入了scenario场景模块这样很奇怪哎,咋子只ST就能解决动态障碍物了????
Apollo 5.0再次大幅度修改public road planner,SL的dp被取消
Apollo6.0-7.0改动不大6
取消SL,ST迭代机制的原因

现在SL只管静态障碍物,ST只管动态障碍物
那么对于动态障碍物就不会影响SL,这样规划出的轨迹就不会变来变去;只影响速度
所以SL ST相互独立
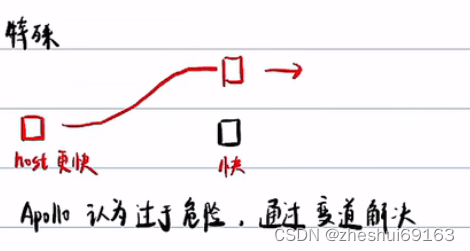
只有两种场景ST会影响SL
场景1


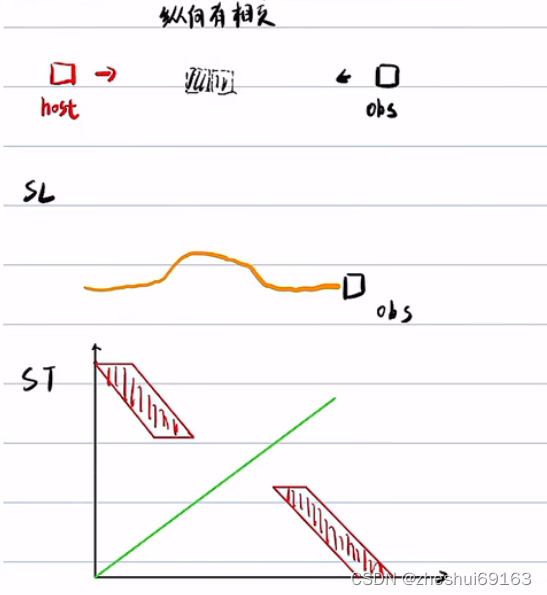
场景2
















 7765
7765











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









