







基于高精地图的定位是高精定位,脱离高精地图的高精定位是自嗨,一般而言自动驾驶的高精定位会采用传感器融合的方式,主要有GPS/DGPS(比如RTK)、IMU、摄像头、激光雷达加高清地图的组合。
多传感器融合一直是自动驾驶的难点,这里不做展开,本文想从另一个角度来辅助车辆定位,应用车道线对车辆进行定位。
本位假设提前已经采集了高精地图,地图包含的元素有:车道线、停止线、箭头、道路坡度等信息,利用一般GPS和视觉计算出准确位置。


1. 初始化
本系统的初始化采用一般GPS来确定车辆的大致位置,结合IMU+GPS惯导系统,实时推算出车辆的大致位置信息,作为系统的初值。

2. 视觉处理
对于车载相机当前拍摄的图像,生成与视觉地图的比例尺寸相同的俯视图;并在俯视图上搜索与视觉地图匹配车道线标的匹配的车道线部分;
3. 特征匹配
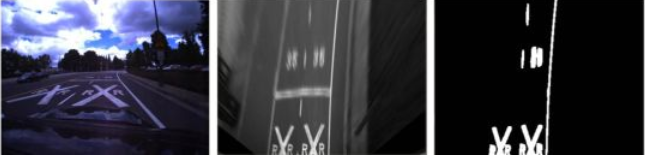
在提取的道路标识和高精地图匹配,特别的,车道线匹配较为简单,但是大部分情况只能进行横向匹配,很难进行纵向匹配(车道线基本是直线,或者弧度较小),如何进行纵向匹配,这就需要其他道路标识进行辅助,这里特别说明的是,不同于车道线的识别,其他道路标识形状各异,很难识别,这里主要采用特征匹配的方式:

如图我们很难识别出文字内容(深度学习除外),这里我们通过提取角点,把提取到的角点,与地图中的角点kt_tree进行比较,找出最匹配的道路标识。
4. 计算准确位置
确定俯视图与视觉地图之间的坐标转换关系,从而精确确定车辆在世界坐标系中的当前位置。当然,视觉可以利用运动信息,进行相邻帧之间的约束,利用运动跟踪算法确定下一帧俯视图在视觉地图上的位置,这里就不展开了。
整个系统的框架如下:
















 2337
2337











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









