







RS485与CAN的区别:
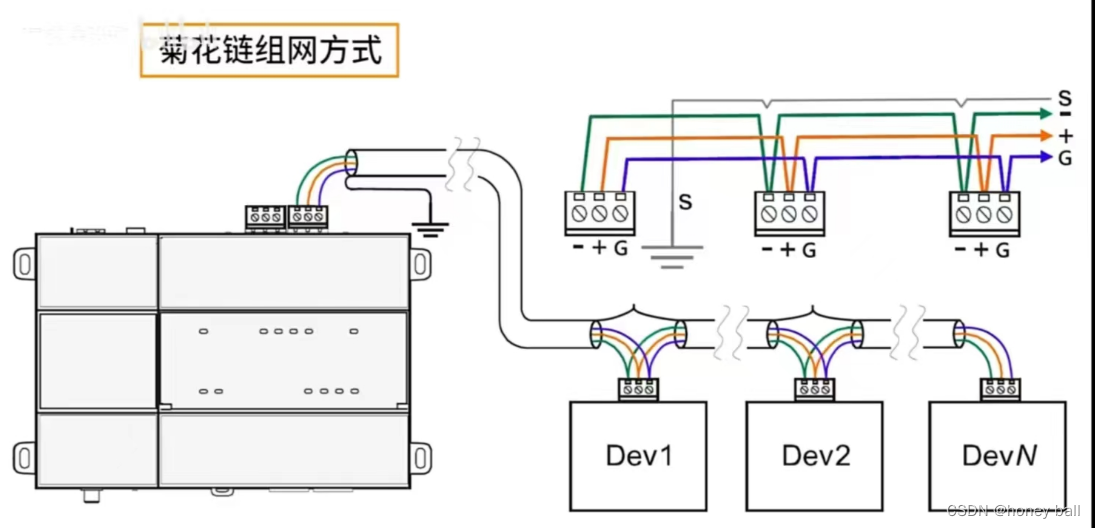
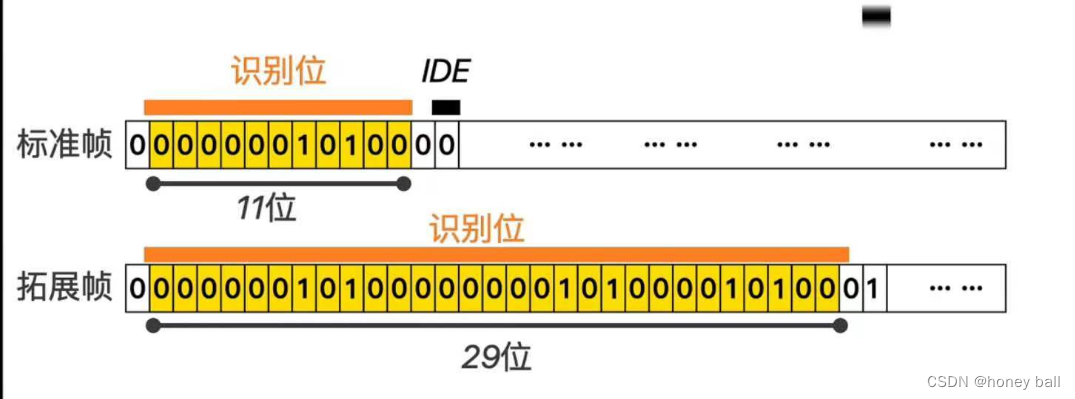
RS485和CAN信号都是差分信号,所以传输介质没有差别。RS485采用星型拓扑结构设计,单个节点控制多个从机,CAN采用无中心化节点设计,属于多节点控制。CAN的通信速度要比RS485高。CAN的通信距离最大支持到500米,RS485最大支持到1000米左右而且还可以通过中继器保证信号质量和延长通信距离。CAN标准帧下一次传输一个字节8位数据扩展帧一次传输8个字节数据,RS485可以任意设置数据位长度。

CAN协议在发送完数据后,接收方会进行ACK应答。ACK应答机制是CAN协议中确保数据传输可靠性的重要环节。当信息传输到ACK前的Del时,可以认为信息已经传输完毕,接收节点也接收到了足够的信息来检测接收的信息是否正确。如果信息正确,接收节点就会将ACK置位为显性0。发送节点在发送数据的同时,会监控总线上的数据,如果检测到ACK SLOT位为“显性”位,则表示接收者已正确接收;如果检测到ACK SLOT位为“隐性”位,则表示没有节点正确接收该报文,此时发送者会知道发送失败,并可能需要重发此条报文。
需要注意的是,CAN总线上的应答位(ACK)不仅用于表示节点已经收到有效的帧,而且任何节点如果准确无误地接收到帧,都需要向总线上发送显性位,以覆盖发送节点输出的隐性位,使总线上表现为显性。此外,并非只有和发送ID匹配的节点才会返回ACK,实际上,总线上的任意一个节点都可以接收到数据并返回ACK。而RS485没有这个应答机制,这也就是RS485安全性没有那么高的原因。
RS485属于差分信号,两条线是A线和B线,而RS232只是将UART的电平幅值提高到12V左右,电平大小变化带来的影响减小。但因为不是差分控制因此传输距离只有15米左右,因此实用性远不如RS485强大。RS485的扩展性强,可以接入以太网:
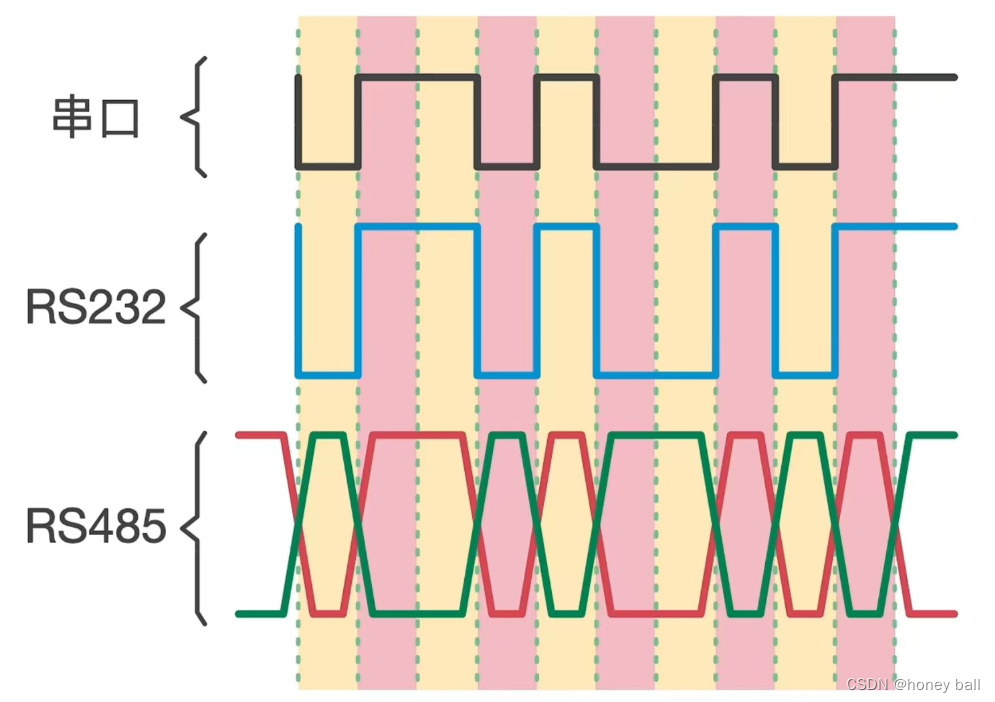

RS485常用于环境复杂的工控场景,所以用线要用好的。

RS485 和 Modbus有什么关系:
RS485属于硬件层面,modbus属于软件协议层面,属于RS485在协议层面的实现。
RS485不是CMOS电平:
CMOS电平是一种用于数字电路传输的电压标准,其取值一般在0V到Vcc之间,其中Vcc是CMOS电路供电电压。逻辑高电平一般为Vcc,逻辑低电平一般为0V。RS485不是CMOS电平。RS485电平标准和CMOS电平标准在电压范围和用途上有所不同。如果需要更深入的理解或具体应用方面的指导,建议查阅相关通信和电路设计领域的CAN总线的电平标准主要分为两部分来描述。
CAN和RS485的电平标准:
RS485标准规定了总线接口的电气特性标准,其中正电平在+2V~+6V之间,负电平在-2V~-6V之间,用于表示逻辑状态。这种差分传输方式能够有效减少噪声信号的干扰,并且RS485工业总线标准能够有效支持多个分节点和通信距离远,对于信息的接收灵敏度也较高。
根据国际电工委员会(IEC)规范,CAN总线系统中的标准电平标准的电压范围为0V到1.5V,其中0V表示低电平,1.5V表示高电平。
然而,在另一种描述中,CAN总线的电平标准被详细划分为:
CANH(总线高)的电压范围为2.5V~3.5V。
CANL(总线低)的电压范围为1.5V~2.5V。
当CANH=CANL=2.5V时,表示隐性电平,逻辑上为“1”。而当CANH=3.5V,CANL=1.5V时,为显性电平,逻辑上为“0”。差分电压的范围为0V~2V。
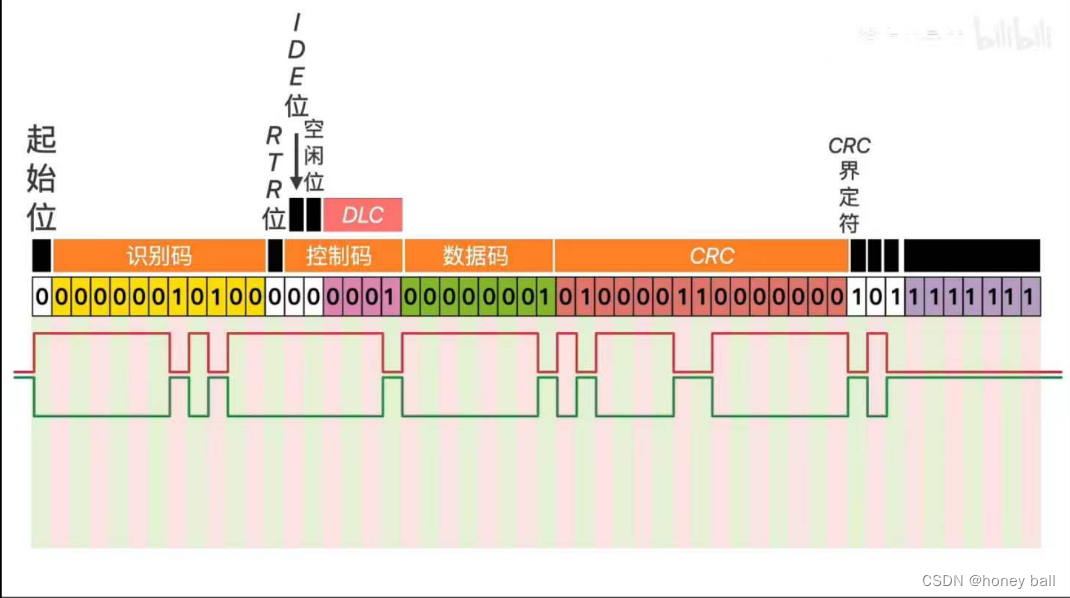
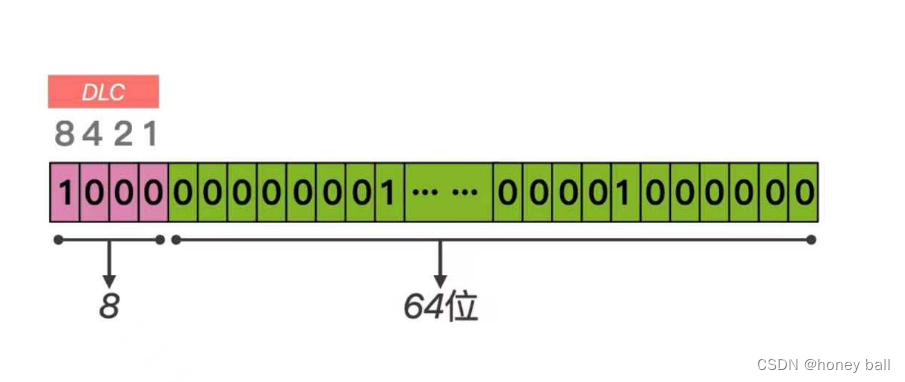
CAN的协议帧:
数据帧为8字节的特殊情况:
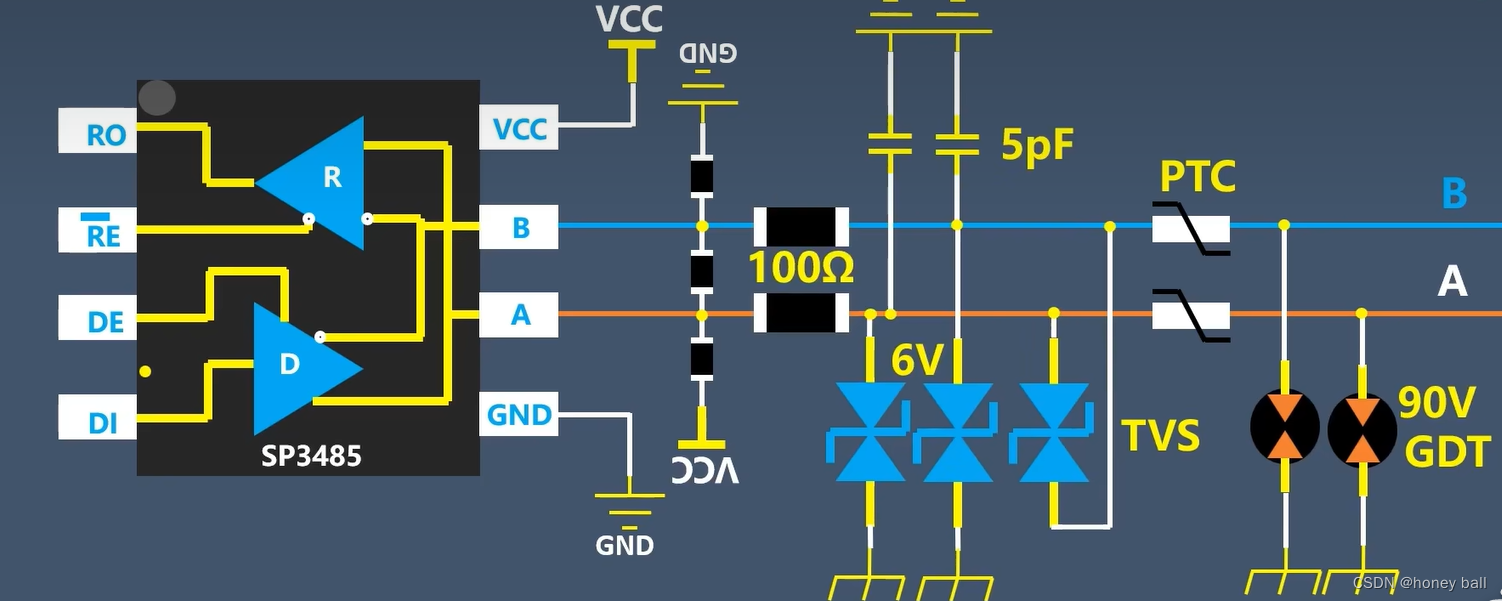
RS485防护电路: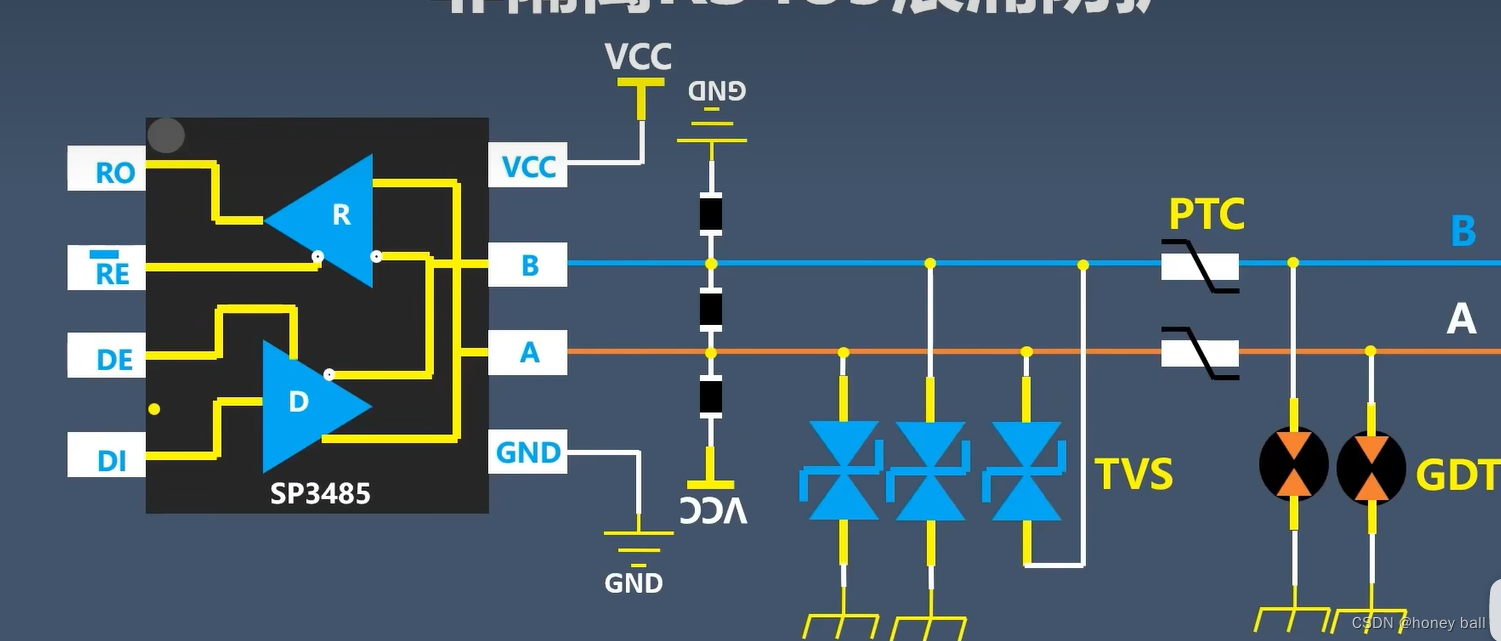
加一个RC滤波可以吸收残压;
同步电机和异步电机的区别:
同步电机,那可是电力系统的心脏啊!它的转速和电网频率之间有固定的关系,转速恒定,和负载大小无关。而且,它的结构复杂,需要专门的设备来维护,但运行起来特别稳定,常用于需要精确控制速度或位置的场合,比如风力发电和大型水泵。而异步电机呢,相对来说就比较亲民了。它的转速会随着负载的变化而变化,结构简单,维护方便,成本也低。所以,它在大部分的工业生产和家用电器中都有广泛应用,比如电动工具、空调压缩机等。
同步电机如下:

异步电机如下:

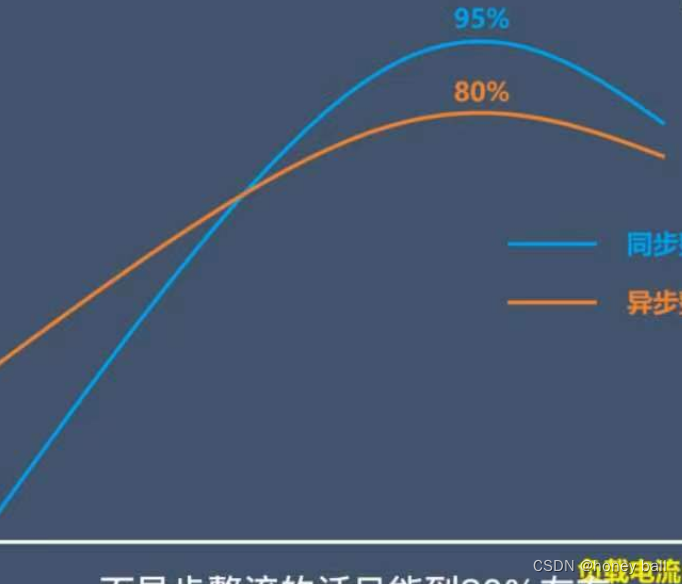
同步整流和异步整流:
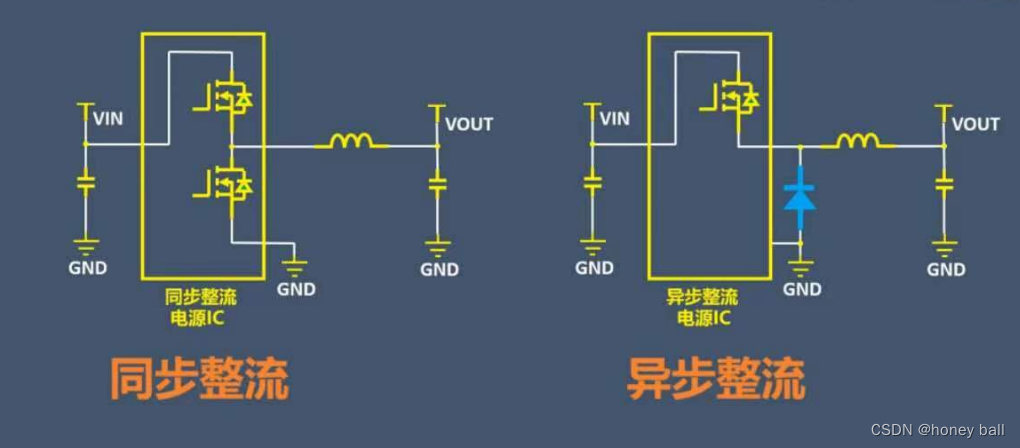
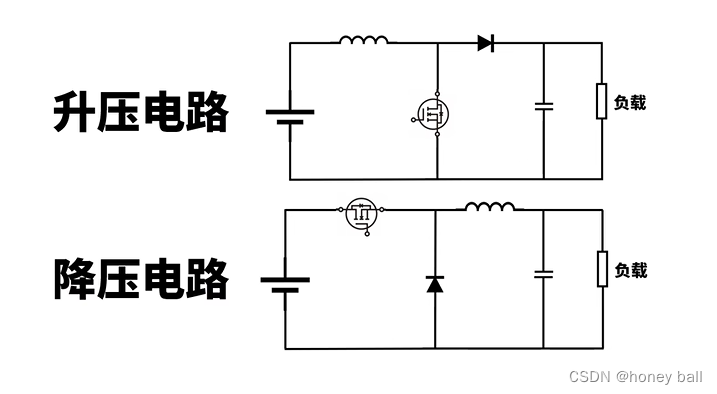
BUCK和BOOST拓扑:

















 4896
4896

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









