






官方教程;
Mission Planner地面站介绍 | Autopilot (gitbook.io)
Mission Planner 功能/屏幕 — Mission Planner 文档 (ardupilot.org)
安卓或者windows软件下载地址:
在完全装机后再进行各干器件的校准,没有组装完成就直接校准是没有意义的。调试的时候不要装桨叶和不要接电池。
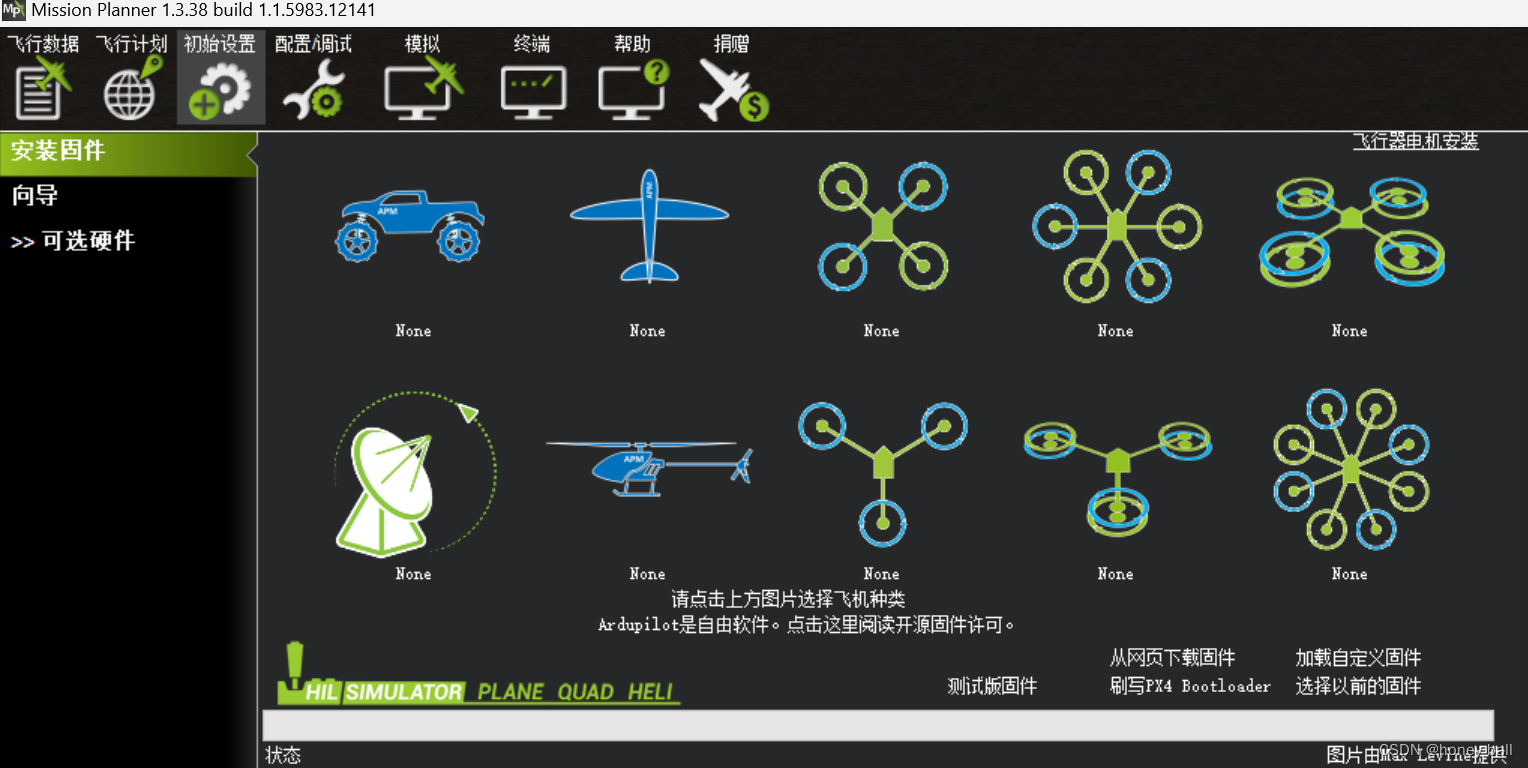
一般不用在线刷写固件,都是从官方下载HEX文件的固件,点击地面站的右下角“加载自定义固件”进行固件的下载:
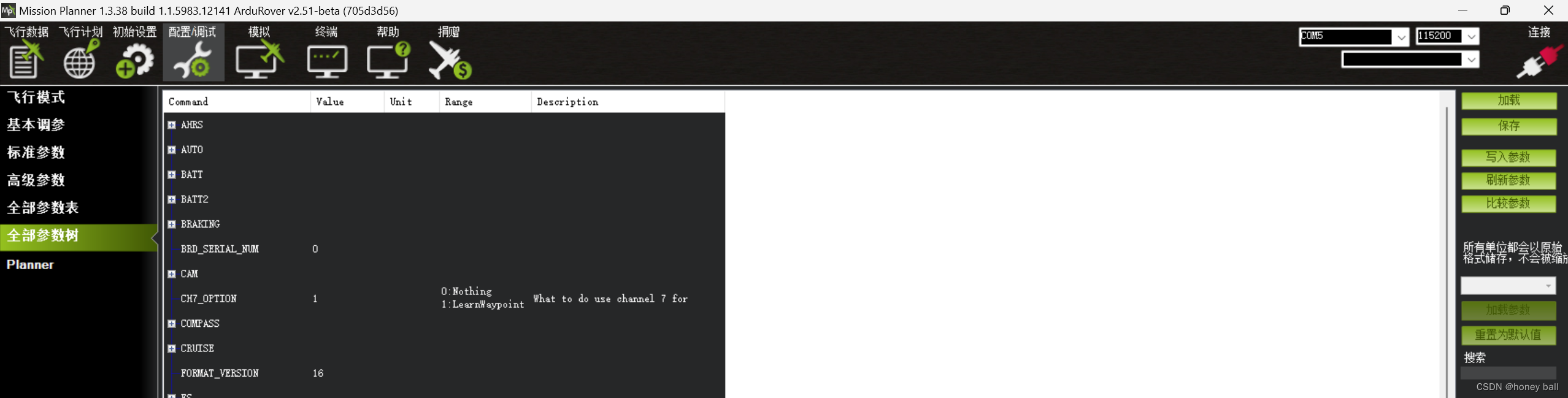
调试飞控前点击重置为默认值:
使用Mission Planner电机测试检查电机编号
检查电机是否已正确连接的另一种方法是使用“Mission planner初始设置”菜单中的“电机”测试。
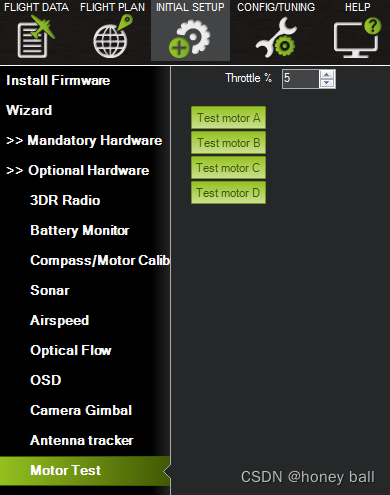
飞控连接地面站后,您可以单击上面显示的绿色按钮,相应的电机应旋转五秒钟。字母与电机编号相对应,如下例所示。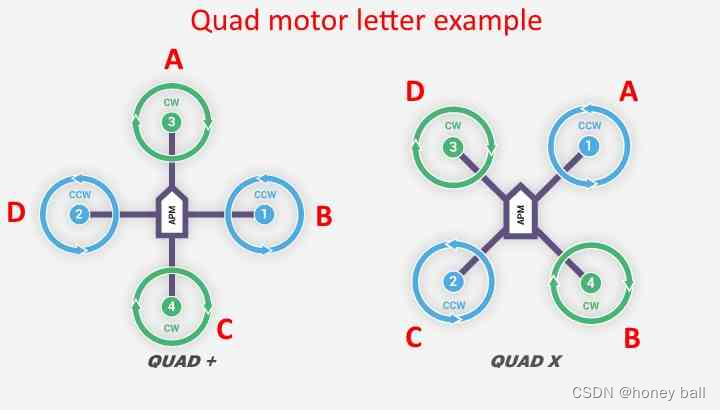
- 首先卸掉螺旋桨!
- 如果没有电机转动,将“油门”提高到10%,持续时间加长,然后重试。如果不起作用,请尝试15%。
-
“+”字形机架,第一个旋转的电机将直接位于正前方,在"X"形机架,第一个旋转的电机将在右前方,然后,电机测试字母将以顺时针方向顺序递增。
-
在X8的机架下,它将先旋转右上方的顶部电动机,然后旋转右下方的底部,并以相同的模式进行旋转。
-
OctoV将首先旋转右前电动机,然后再次顺时针旋转直到到达左前电动机。
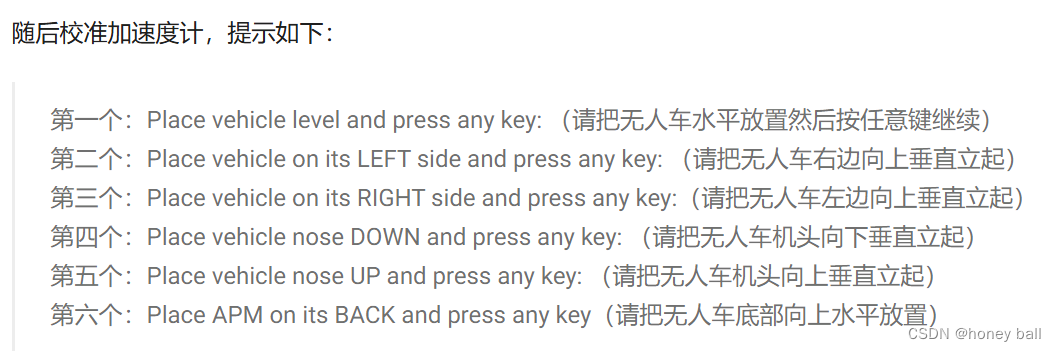
之后依次校准各个部件;将GPS的输出接上飞控的对应的GPS MODULE口,打开地面站,USB连接飞控,选择“连接”,连接成功后进入“初始设置”页面,展开左侧“必要硬件”,准备校准。

加速度计校准:

















 8980
8980

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









