







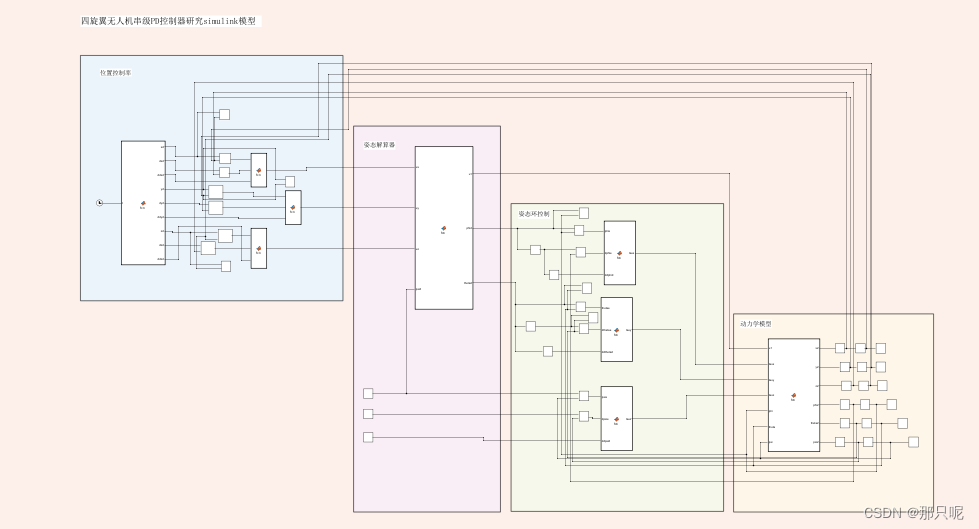
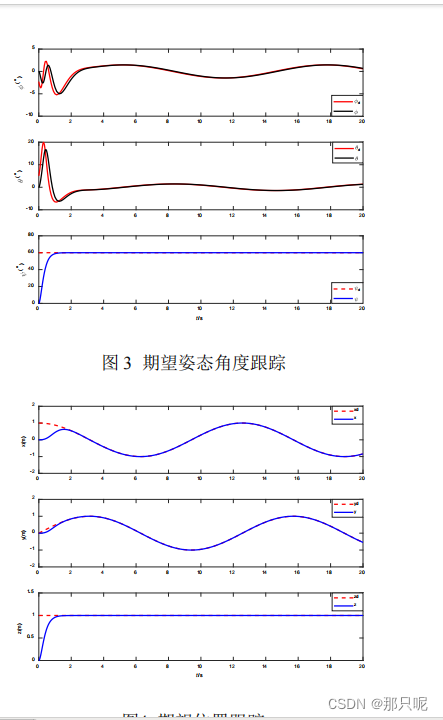
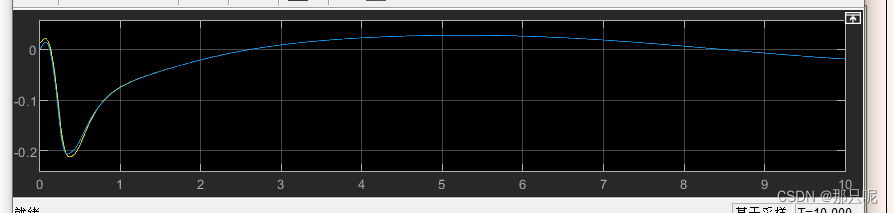
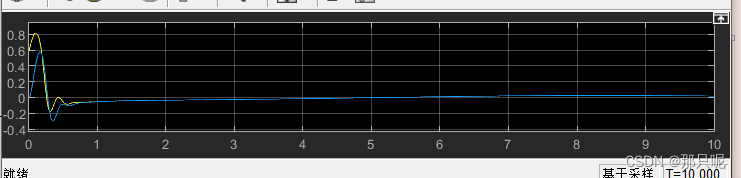
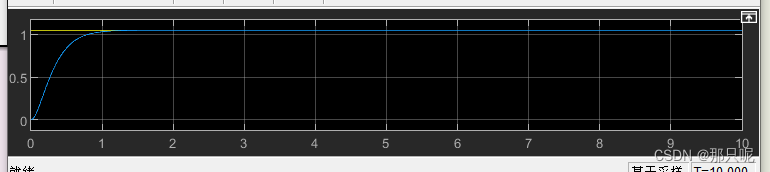
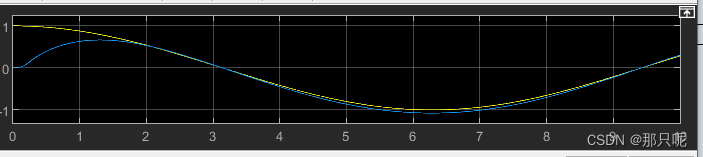
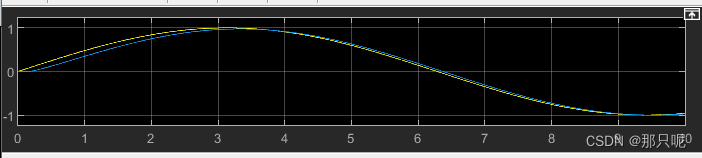
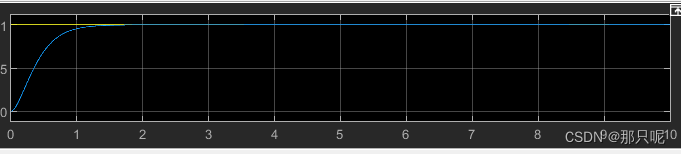
本人完美复现了四旋翼无人飞行器串级 PD 控制器的研究,该模型性能良好,附赠参考文献,每个公式都有复现。首先基于牛顿-欧拉方法对四旋翼无人飞行器进行动力学建模,然后采 用基于 Proportion Derivative 内外环串级的分布式控制系统对飞行器的运动状态进行控制,最后基于简化模型进行了位置跟 踪的仿真测试。仿真实验结果表明,基于内外环的 Proportion Derivative 控制率设计的控制器能够实现对四旋翼无人机飞行器位置和姿态的快速的跟踪,具有较好的控制品质。
模型获取链接:四旋翼无人飞行器串级 PID 控制器的研究simulink仿真模型---论文完美复现















 541
541

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









