







上 肢 康 复 机 器 人 是 医 疗 机 器 人 的 一 个 重 要 分 支 , 它 以 偏 瘫 脑 卒 中 病 人 运 动 疗 法 中 的 运 动 再 学 习 理 论 为 基 础 , 融 合 了 医 学 、 生 物 学 、 机 械 学 、 信 息 与 计 算 机 科 学 等 诸 多 学 科 , 是 目 前 国 内 外 的 研 究 热 点 。 本 文 对 上 肢 康 复 机 器 人 系 统 的 总 体 设 计 、 运 动 学 分 析 、 运 动 控 制 系 统 、 机 器 人 样 机 及 实 验 等 进 行 了 研 究 和 开 发 , 为 该 领 域 产 品 设 计 奠 定 理 论 基 础 、 提 供 技 术 支 撑 。
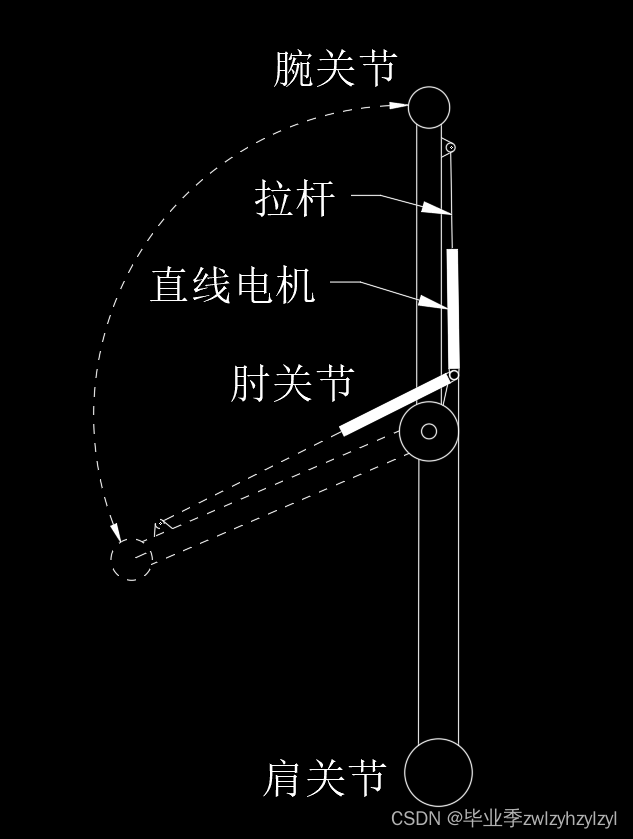
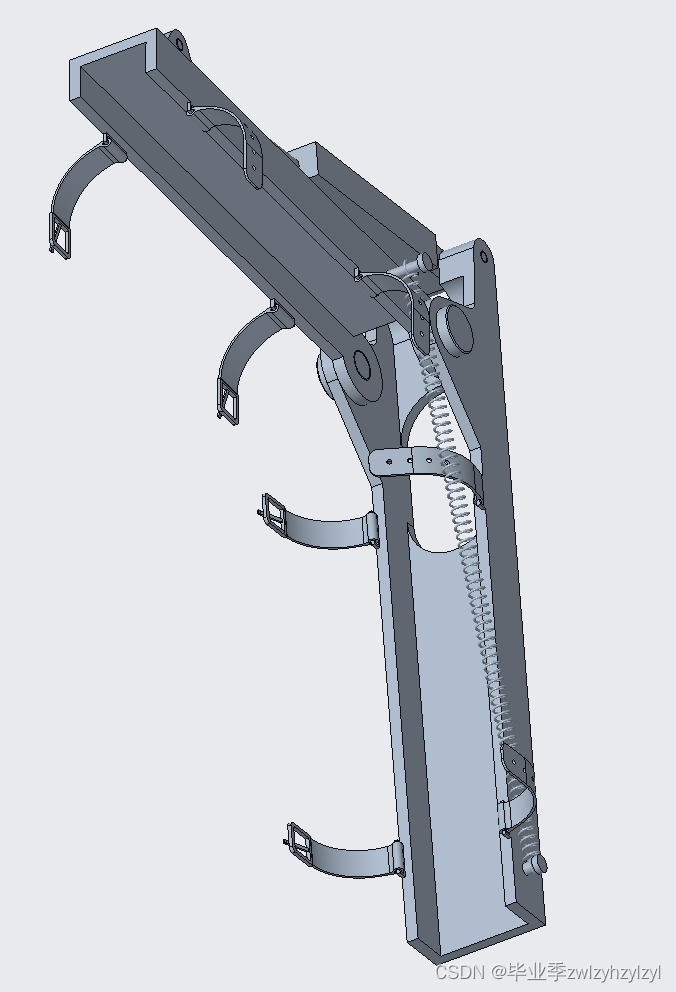
论 文 结 合 上 肢 解 剖 学 和 运 动 治 疗 理 论 , 从 安 全 性 、 仿 生 学 、 外 骨 骼 材 质 、 训 练 任 务 、 安 装 使 用 等 几 个 方 面 总 结 出 上 肢 康 复 机 器 人 的 设 计 要 求 ;在 此 基 础 上 , 设 计 出 了 轻 型 、 运 动 可 靠 的 上 肢 外 骨 骼 康 复 机 器 人 肘 关 节 机 械 系 统 , 并 详 细 介 绍 了 康 复 机 器 人 系 统 的 机 械 本 体 和 控 制 策 略 。
关键词:上肢康复机器人,运动学分析,运动控制系统
As an important branch of medical robot, the rehabilitation training robot for stroke hemiplegic patients is a hot research topic both at home and abroad. Based on motor relearning theory, it combines many technology fields such as medicine, biology, mechanics, information & computer science, etc. This thesis makes researches on system design, kinematic analysis, motion control system, prototype and experiment, and lies the foundation for further theoretical research and provides technical supportings.
Taking safety, bionics,exoskeleton material, training mission and installation use into consideration, the design rules for upper limb rehabilitation robot are proposed on basis of human upper limb anatomy and motion rehabilitation theory. Under the guidance of rules, a novel exoskeletal upper limb rehabilitation robot for patients in light and movement reliable is developed.The mechanical structure, control strategies of the rehabilitation system are also introduced.
Keywords: Upper limb rehabilitation robot,Kinematic analysis,Motion control system
目录
…………















 1579
1579











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









