







在工业环境、建筑建模、机器人感知等场景中,圆柱体(如管道、立柱)是常见结构之一。如何从复杂的点云数据中准确检测出这些结构,是计算机视觉和3D感知中的重要课题。
本文将详细解析一套基于 Open3D 实现的点云圆柱检测系统,包括完整流程、关键参数配置与背后的原理。最终实现 高鲁棒性 + 可视化反馈 + 准确几何验证 的目标。
圆柱检测流程
-
读取点云
-
体素下采样
-
RANSAC 地面分割
-
区域生长提取候选区域(法向量聚类)
-
基于法向量和自定义 RANSAC 拟合圆柱模型
-
几何特征验证(半径、高度、表面点分布)
-
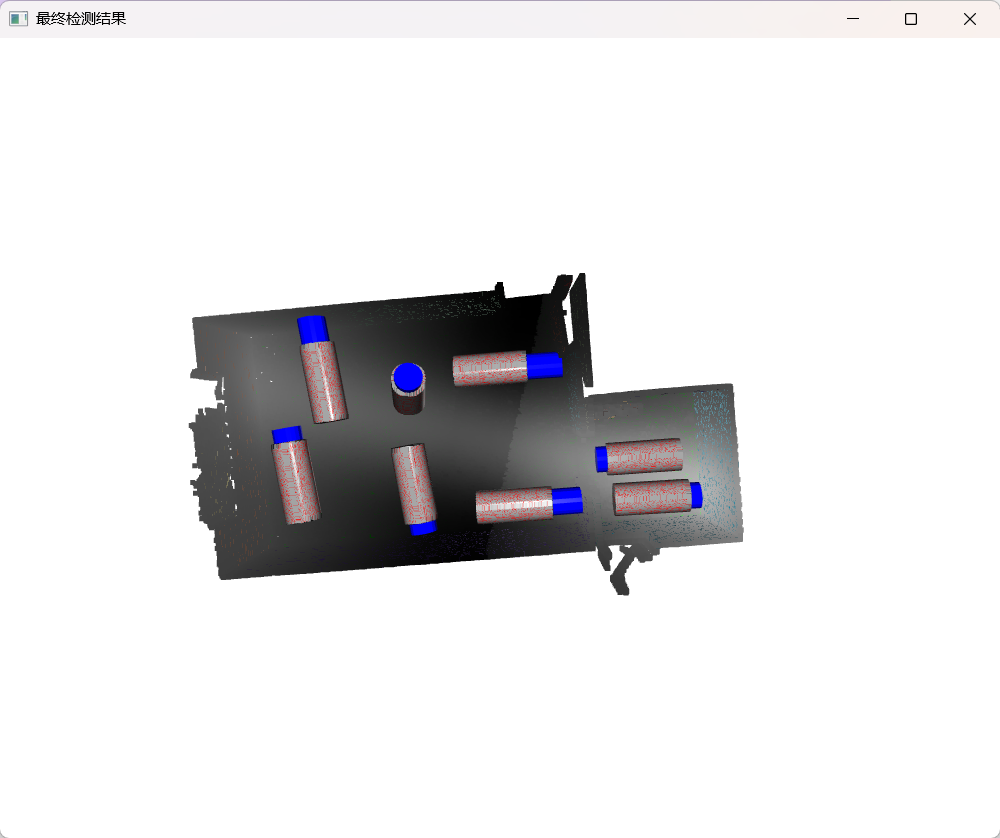
可视化检测结果
1. 点云预处理
-
通过体素栅格(Voxel Grid)采样,每个立方体保留一个代表点
-
voxel_size控制采样精度,越小越精细,但处理成本越高
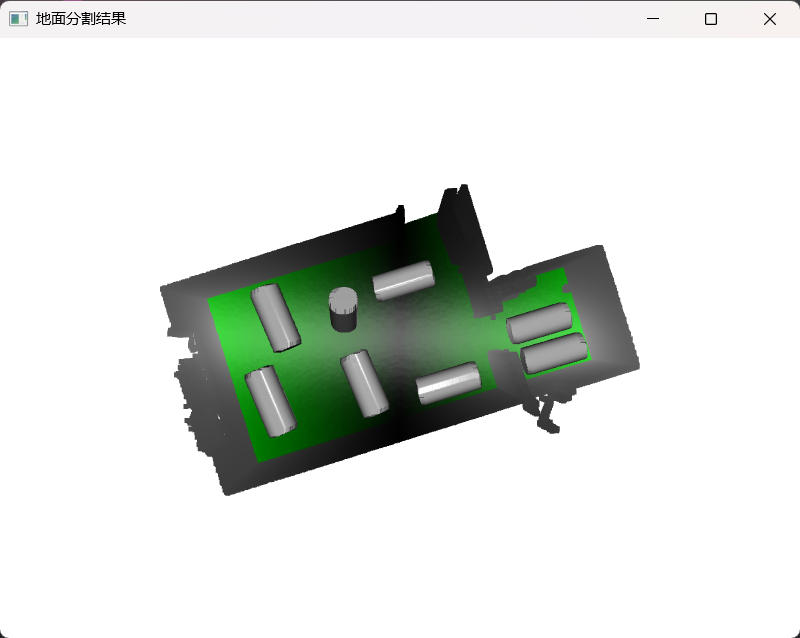
2. 地面提取(平面分割)
-
使用 RANSAC 拟合平面
-
distance_threshold控制点到平面的容差 -
返回两个点云:
-
地面点
ground -
非地面点
non_ground
-
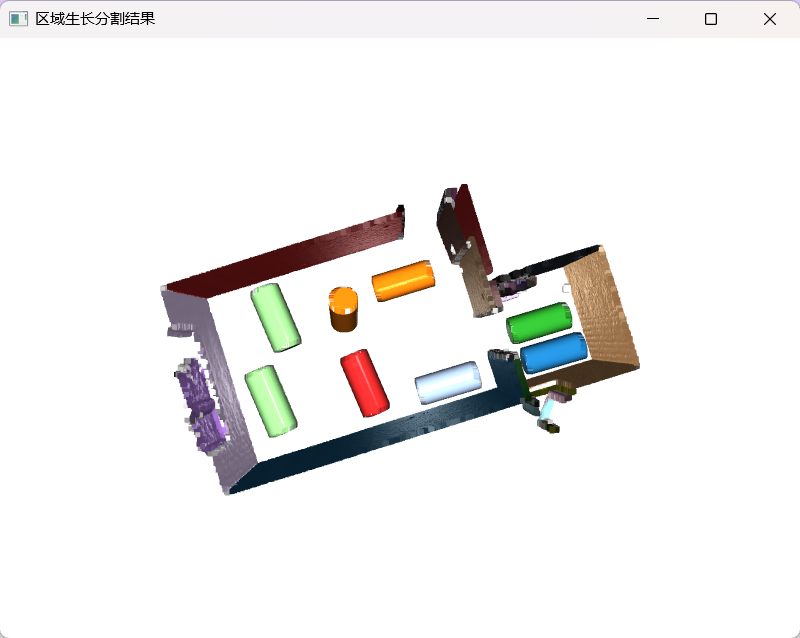
3. 区域生长分割(Region Growing)
region_growing_angle 法向量夹角阈值,控制生长范围
region_growing_min_points 每个区域最小点数,过滤噪声
原理:对于每个点,判断其邻域点法向量与自身法向量夹角是否小于阈值,若是则加入当前区域。
4. 圆柱拟合(自定义 RANSAC)
目的:在候选区域中通过 RANSAC 迭代拟合出圆柱模型
拟合过程:
-
从当前区域中随机采样 2~3 个点
-
使用法向量推导圆柱轴线方向与圆心点
-
利用几何公式计算半径
-
判断每个点到轴线的距离是否在半径 ± σ 之内,统计内点数量
-
迭代
ransac_iterations次,选出最佳拟合模型
| ransac_dist_threshold | 点到模型距离阈值 |
| ransac_sample_num | 每次采样点数 |
| ransac_sigma | 模拟圆柱厚度的容差 |
| ransac_iterations | 拟合迭代次数 |
| cylinder_radius_min/max | 限定圆柱半径范围 |
5. 圆柱几何验证
目的:确保拟合结果符合真实场景的几何属性
验证点:
-
半径容差:拟合的圆柱半径是否在预设范围内
-
高度范围:圆柱有效高度(轴线投影)是否合理
-
点密度一致性:计算半径标准差,确保圆柱不是“变形的”
-
有效区域分布:限制分析范围在轴线中间区域,忽略上下端干扰
-
圆柱表面点占比:大于
cylinder_min_inliers_ratio视为有效
| 参数 | 含义 |
| cylinder_radius_tolerance | 半径波动容差 |
| cylinder_min_height/max_height | 限制圆柱高度 |
| cylinder_min_inliers_ratio | 圆柱点占整个簇的比例 |
| cylinder_axial_ratio | 用于分析的轴线有效长度比例 |
该方案适用场景
-
工业场景中管道结构检测
-
BIM / 建筑建模中立柱自动提取
-
室内机器人地图构建中柱子识别
-
激光雷达点云中目标检测前处理

















 1612
1612

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









